| 现代控制理论 | 您所在的位置:网站首页 › carsim安装 › 现代控制理论 |
现代控制理论
|
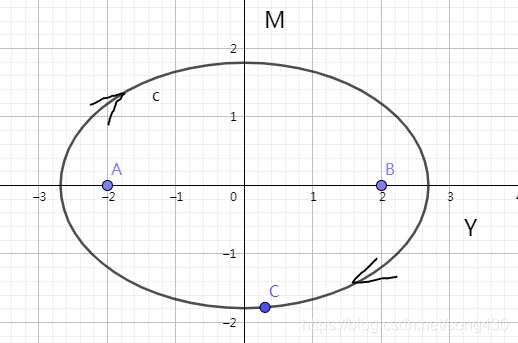
这一章也是我最先看到进而关注up主的一章,特别推荐看原视频(https://www.bilibili.com/video/av15795540 )。我感觉我记下的笔记应该不如原视频精彩的十分之一。先看一些基本的假设,假设有一个男孩叫与非,女孩叫梦寒。用Y(t)Y(t)Y(t)表示与非对梦寒的爱或者恨,当Y>0Y>0Y>0的时候,与非是爱着梦寒的;当Y0的时候,梦寒是爱着与非的;当M0,可以得出平衡点为Yf=0,Mf=0Y_f=0,M_f=0Yf=0,Mf=0,在进行分析之前,我们先来描述一下这个系统。 step1:系统描述(1)根据这个函数表达式,可以看出与非是个耿直boy,你对我好,我也对你好;你讨厌我,我也不理你。也就是投桃报李+以牙还牙的性格(2)梦寒则是一个多情的girl,你越热情她越远离;你越冷淡她越着迷,是欲迎还拒+若即若离的性格 step2:计算我们把这个系统写成状态方程的形式 [Y˙M˙]=[0a−b0][YM]\left[ ˙Y˙M \right] =\left[ 0a−b0 \right] \left[ YM \right][Y˙M˙]=[0−ba0][YM] 通过前面的讲解我们知道可以通过求AAA矩阵的特征值和特征向量来判断系统的表现,在此,我们求矩阵的特征值,令AAA矩阵的行列式为0,也就是∣λI−A∣=0|\lambda I-A|=0∣λI−A∣=0,可以求出λ=±abi\lambda=\pm\sqrt{ab}iλ=±abi。我们知道这是一个center,在直角坐标系中可以表示成一个圆。 step3:分析我们可以看出这是一个无限循环,爱恨交织的世界。我们来看第四象限,当Y>0Y>0Y>0时,M0,可以看出平衡点也都是0。 step1:系统描述可以看出Y,MY,MY,M是一类人,他们都会积极的回应对方(对别人都是正值,b>0b>0b>0),同时他们都很小心,都有所保留(对自己都是负值,−a∣b∣,此时λ1 |
【本文地址】