| stm32移植RT | 您所在的位置:网站首页 › c2362参数 › stm32移植RT |
stm32移植RT
|
stm32移植RT-Thread Nano实现Finsh全步骤
参考资料 RT-Thread 文档中心 RT-Thread 文档中心
准备工作
stm32f103裸机点灯源码keil安装RT-Thread Nano Pack。(RT-Thread 文档中心有下载连接,下载完毕直接点击安装)
步骤详解
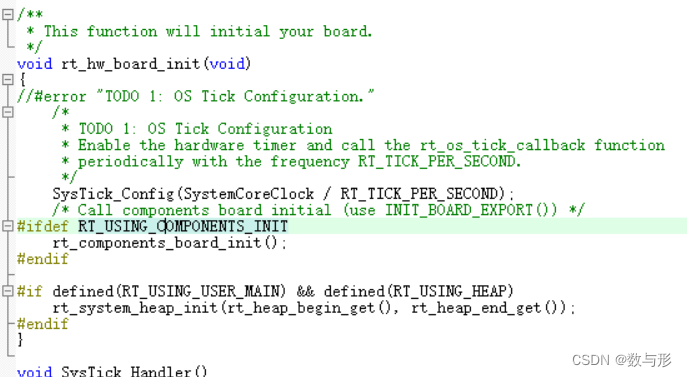
添加RT-Thread Nano到工程 (这里的步骤见RT-Thread 文档中心,链接在文章头部) 删除 stm32f10x_it.c中的 HardFault_Handler以及PendSV_Handler函数,这两个函数已经由RT-Thread实现 此时会出现 #error "TODO 1: OS Tick Configuration.错误,提醒你配置时钟 在board.c中实现时钟的配置操作 rt_hw_board_init函数 - a:注释掉提示代码#error "TODO 1: OS Tick Configuration." - b:添加系统时钟配置 SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND); - 5.此时RT-Thread内核已经移植完毕,在main函数中添加相关代码测试,记得添加RT-Thread头文件#include 内核功能测试代码,跑一个点灯线程,这里没有写初始化,初始化需要放在系统的硬件初始化里面:components.c文件夹,找到rtthread_startup->rt_hw_board_init;将所有的硬件初始化都写在rt_hw_board_init函数顶部。 #include "stm32f10x.h" #include "bsp_led.h" #include "delay.h" #include void thread01_entry( void *parameter); static rt_thread_t thread01 = RT_NULL; //这里没有写LED初始化,LED初始化需要放在系统的硬件初始化里面:components.c文件夹,找到rtthread_startup->rt_hw_board_init;将所有的硬件初始化都写在rt_hw_board_init函数顶部。 int main(void) { thread01 = rt_thread_create( "thread01",thread01_entry,RT_NULL,512,3,20); rt_thread_startup(thread01); } void thread01_entry( void *parameter) { while(1) { LED1_ON; rt_thread_delay(500); LED1_OFF; rt_thread_delay(500); } }现象就是LED灯不断闪烁,这里已经完成内核移植测试,接下来移植finsh组件。 finsh移植,finsh一般通过串口和用户交互 首先实现rt_kprintf函数, 新建文件夹,串口实现初始化,并且添加头文件路径 (bsp_usart.c) #include "bsp_usart.h" #include /** * @brief USART GPIO 配置,工作参数配置 * @param 无 * @retval 无 */ void USART_Config( void ) { GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; // 打开串口GPIO的时钟 DEBUG_USART_GPIO_APBxClkCmd( DEBUG_USART_GPIO_CLK, ENABLE ); // 打开串口外设的时钟 DEBUG_USART_APBxClkCmd( DEBUG_USART_CLK, ENABLE ); // 将USART Tx的GPIO配置为推挽复用模式 GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init( DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure ); // 将USART Rx的GPIO配置为浮空输入模式 GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init( DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure ); // 配置串口的工作参数 // 配置波特率 USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE; // 配置 针数据字长 USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 配置停止位 USART_InitStructure.USART_StopBits = USART_StopBits_1; // 配置校验位 USART_InitStructure.USART_Parity = USART_Parity_No ; // 配置硬件流控制 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 配置工作模式,收发一起 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 完成串口的初始化配置 USART_Init( DEBUG_USARTx, &USART_InitStructure ); // 使能串口 USART_Cmd( DEBUG_USARTx, ENABLE ); } bsp_usart.h #ifndef __USART_H #define __USART_H #include "stm32f10x.h" #include /** * 串口宏定义,不同的串口挂载的总线和IO不一样,移植时需要修改这几个宏 * 1-修改总线时钟的宏,uart1挂载到apb2总线,其他uart挂载到apb1总线 * 2-修改GPIO的宏 */ // 串口1-USART1 #define DEBUG_USARTx USART1 #define DEBUG_USART_CLK RCC_APB2Periph_USART1 #define DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd #define DEBUG_USART_BAUDRATE 115200 // USART GPIO 引脚宏定义 #define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA) #define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd #define DEBUG_USART_TX_GPIO_PORT GPIOA #define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9 #define DEBUG_USART_RX_GPIO_PORT GPIOA #define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10 #define DEBUG_USART_IRQ USART1_IRQn #define DEBUG_USART_IRQHandler USART1_IRQHandler void USART_Config(void); #endif /* __USART_H */ 在rtconfig.h中定义RT_USING_CONSOLE,打开下面代码,并且编译之后出现的两个error提示代码注释掉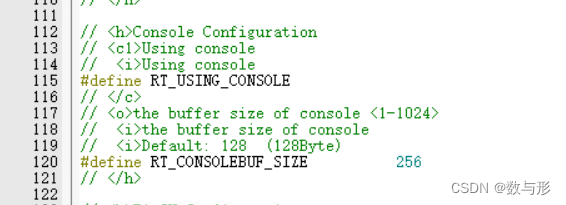 (board.c),将下列代码注释掉
static int uart_init(void)
{
#error "TODO 2: Enable the hardware uart and config baudrate."
return 0;
}
INIT_BOARD_EXPORT(uart_init);
void rt_hw_console_output(const char *str)
{
#error "TODO 3: Output the string 'str' through the uart."
}
修改为以下代码,注意包含串口的头文件,以及头文件"stm32f10x.h" (board.c)
static int uart_init(void)
{
//#error "TODO 2: Enable the hardware uart and config baudrate."
USART_Config();
return 0;
}
INIT_BOARD_EXPORT(uart_init);
void rt_hw_console_output(const char *str)
{
//#error "TODO 3: Output the string 'str' through the uart."
rt_enter_critical();
/* 直到字符串结束 */
while ( *str != '\0' )
{
/* 换行 */
//RT-Thread 系统中已有的打印均以 \n 结尾,而并非 \r\n,所以在字符输出时,需要在输出 \n 之前输出 \r,完成回车与换行,否则系统打印出来的信息将只有换行
if ( *str == '\n' )
{
USART_SendData( DEBUG_USARTx, '\r' );
while ( USART_GetFlagStatus( DEBUG_USARTx, USART_FLAG_TXE ) == RESET );
}
USART_SendData( DEBUG_USARTx, *str++ );
while ( USART_GetFlagStatus( DEBUG_USARTx, USART_FLAG_TXE ) == RESET );
}
/* 退出临界段 */
rt_exit_critical();
}
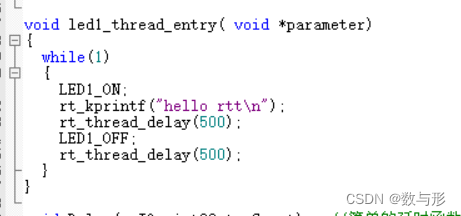
编译不报错代表rt_kprintf函数以及可以正常使用,在点灯线程里该代码测试。可以正常打印。 (board.c),将下列代码注释掉
static int uart_init(void)
{
#error "TODO 2: Enable the hardware uart and config baudrate."
return 0;
}
INIT_BOARD_EXPORT(uart_init);
void rt_hw_console_output(const char *str)
{
#error "TODO 3: Output the string 'str' through the uart."
}
修改为以下代码,注意包含串口的头文件,以及头文件"stm32f10x.h" (board.c)
static int uart_init(void)
{
//#error "TODO 2: Enable the hardware uart and config baudrate."
USART_Config();
return 0;
}
INIT_BOARD_EXPORT(uart_init);
void rt_hw_console_output(const char *str)
{
//#error "TODO 3: Output the string 'str' through the uart."
rt_enter_critical();
/* 直到字符串结束 */
while ( *str != '\0' )
{
/* 换行 */
//RT-Thread 系统中已有的打印均以 \n 结尾,而并非 \r\n,所以在字符输出时,需要在输出 \n 之前输出 \r,完成回车与换行,否则系统打印出来的信息将只有换行
if ( *str == '\n' )
{
USART_SendData( DEBUG_USARTx, '\r' );
while ( USART_GetFlagStatus( DEBUG_USARTx, USART_FLAG_TXE ) == RESET );
}
USART_SendData( DEBUG_USARTx, *str++ );
while ( USART_GetFlagStatus( DEBUG_USARTx, USART_FLAG_TXE ) == RESET );
}
/* 退出临界段 */
rt_exit_critical();
}
编译不报错代表rt_kprintf函数以及可以正常使用,在点灯线程里该代码测试。可以正常打印。
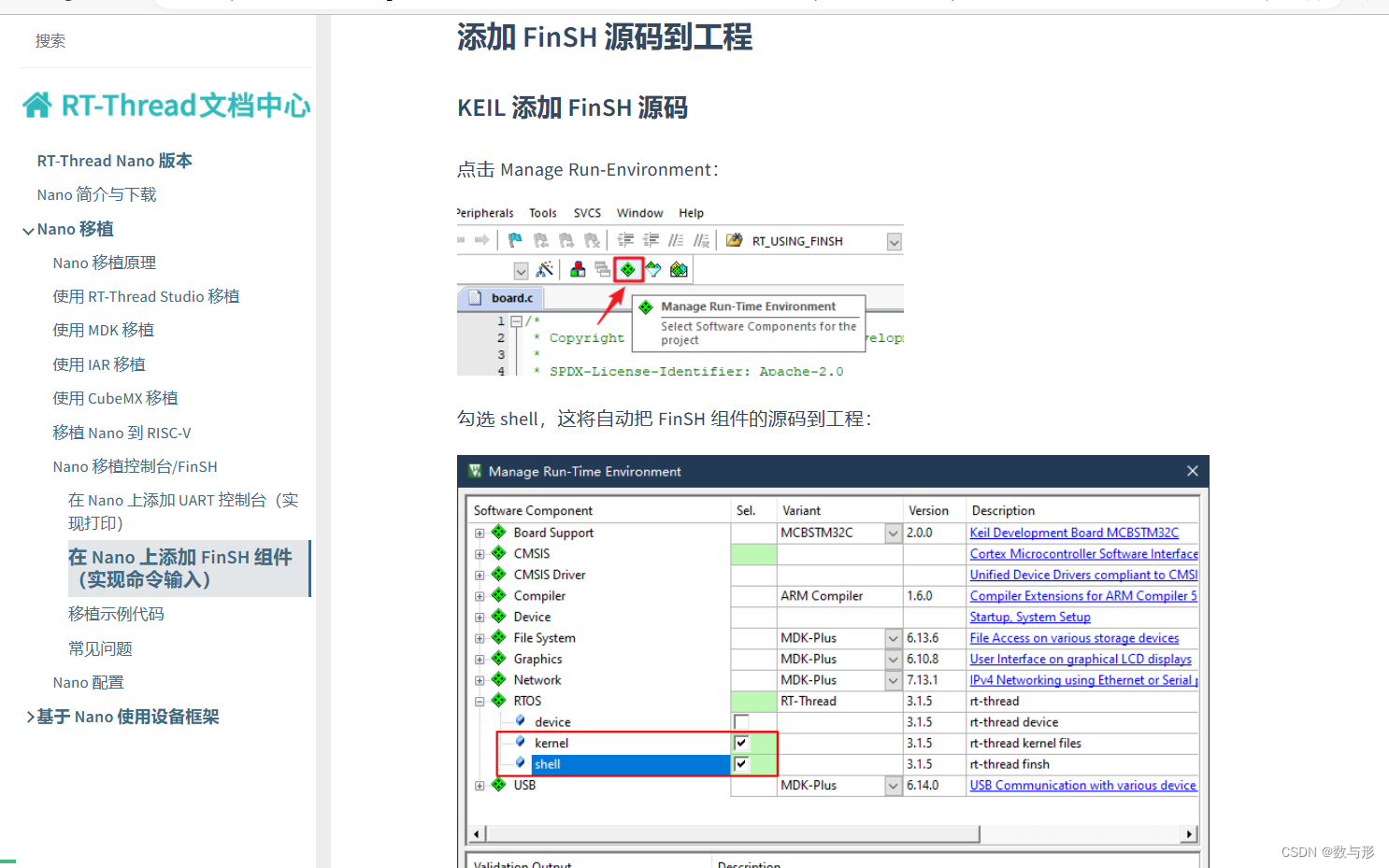
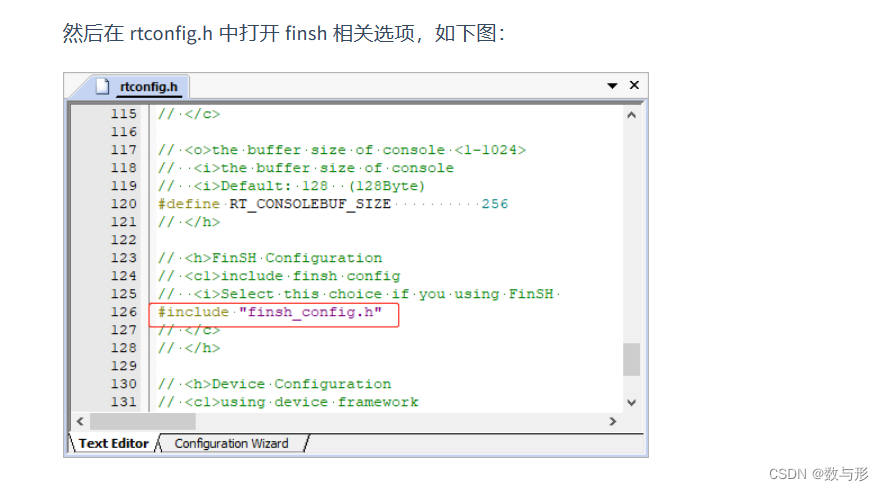
添加finsh源码到工程,然后在 rtconfig.h 中打开 finsh 相关选项,(这一步图解见RT-Thread 文档中心,链接在文章头部) 这里有报错,提示我们要实现rt_hw_console_getchar,双击报错进入相关文档 替换finsh_port.c相关代码(finsh_port.c) #include #include #include "stm32f10x.h" #include "bsp_usart.h" #ifndef RT_USING_FINSH #error Please uncomment the line in the rtconfig.h #endif #ifdef RT_USING_FINSH RT_WEAK char rt_hw_console_getchar(void) { /* Note: the initial value of ch must < 0 */ int ch = -1; //查询方式实现,记得将Usart1初始化中的中断接收配置相关代码注释掉 /*等待串口1输入数据*/ if( USART_GetFlagStatus( DEBUG_USARTx, USART_FLAG_RXNE ) != RESET ) { ch = ( int )USART_ReceiveData( DEBUG_USARTx ); USART_ClearFlag( DEBUG_USARTx, USART_FLAG_RXNE ); } else { if( USART_GetFlagStatus( DEBUG_USARTx, USART_FLAG_ORE ) != RESET ) { USART_ClearFlag( DEBUG_USARTx, USART_FLAG_ORE ); } rt_thread_mdelay( 10 ); } return ch; //#error "TODO 4: Read a char from the uart and assign it to 'ch'." return ch; } #endif /* RT_USING_FINSH */ 到此finsh组件移植完毕测试:使用软件 SecureCRT 7.3,一般的串口调试助手有时候可以,有时候不行,不清楚原因,在使用SecureCRT 7.3的时候要先让开发板工作,再打开串口。 |
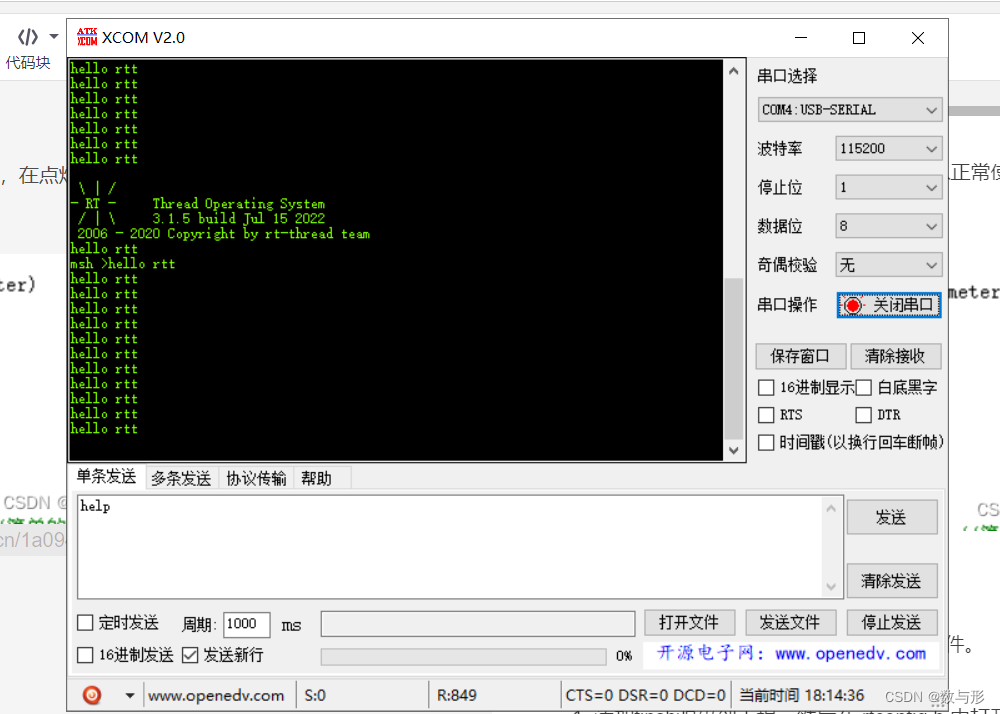
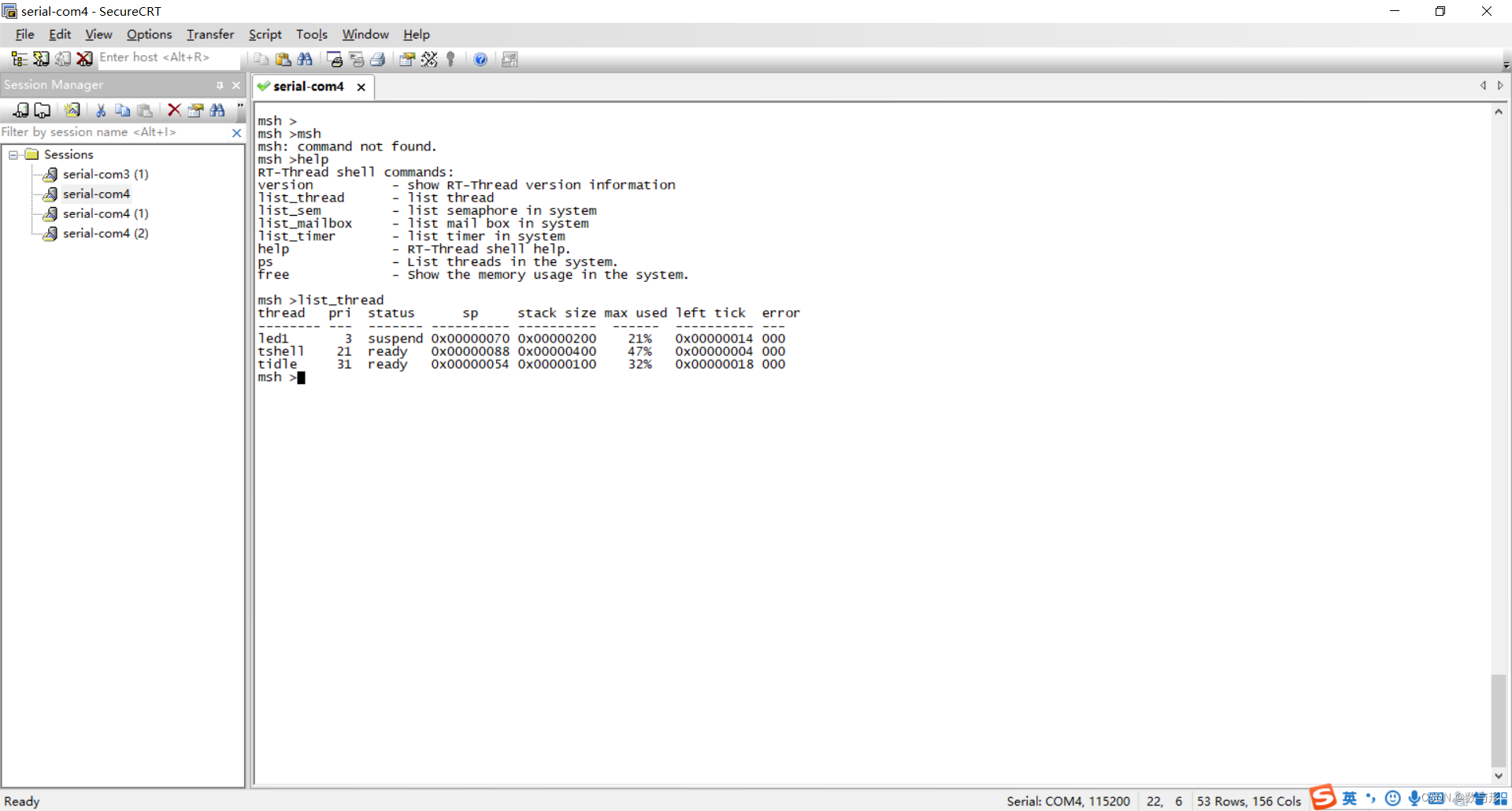 一般的串口调试助手有时候只能读取一个字节,当然如果你不怕麻烦,一个字母一个字母输入也可以。
一般的串口调试助手有时候只能读取一个字节,当然如果你不怕麻烦,一个字母一个字母输入也可以。 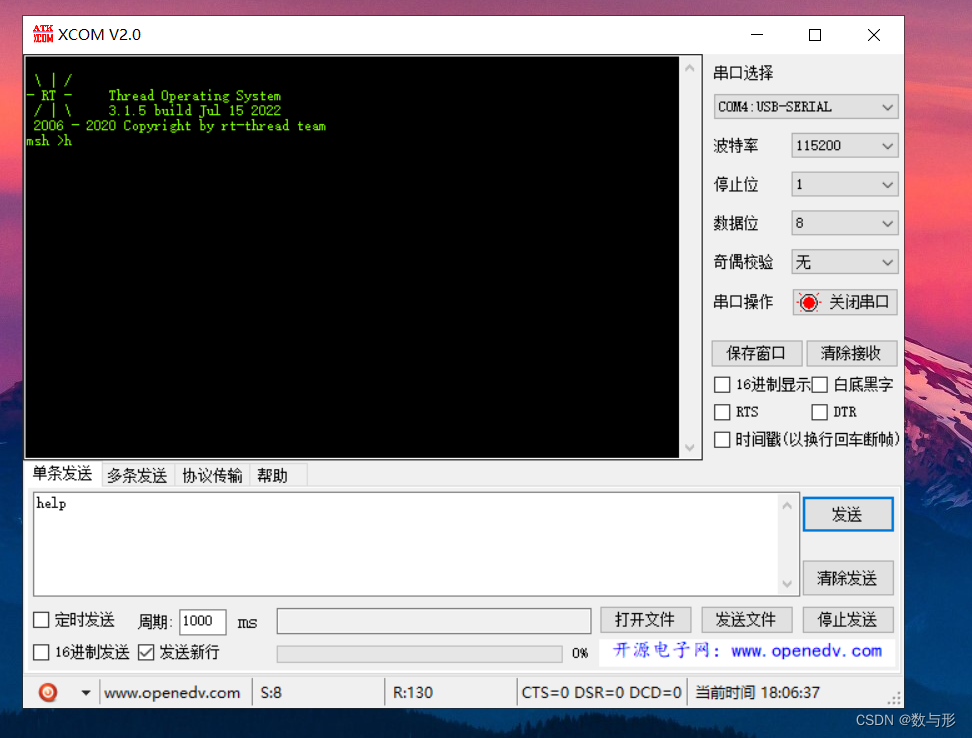
【本文地址】
公司简介
联系我们