| 《多旋翼穿越机基础》穿越机入门基础(第四/五/六章) | 您所在的位置:网站首页 › bf地面站手机版本 › 《多旋翼穿越机基础》穿越机入门基础(第四/五/六章) |
《多旋翼穿越机基础》穿越机入门基础(第四/五/六章)
|
广西百色市右江区 郭远东 微信bbsgyd V2022.5.21(第四/五/六章) 第四章 多旋翼穿越机调参基础 第1节 下载并安装F4飞控驱动和Betaflight调参软件 1.下载并安装BF软件: Betaflight简称BF,该软件可以安装在windows7-11的系统上,安装完成后会在桌面上出现一个蜂鸟的快捷图标。如何下载它呢?这是github软件开源库Betaflight官方网站地址,页面是英文的,网站不在中国境内,打开网站https://github.com/betaflight/betaflight-configurator/releases/有点慢,需要等待的时间比较久,需要有耐心。也可以在百度网盘分享的链接里下载,这里作者分享一个链接,里面有F4飞控各种程序,BF调参软件下载后可直接进行安装,有些系统安装软件过程需要等待几十分钟。 调参和驱动链接:https://pan.baidu.com/s/18_4Ctg4PlWlpOCYt-lwpVw 提取码:v8v8 ,如果链接失效,可以加作者的微信bbsgyd申请新的分享地址。 BF地面站调参软件安装后的启动界面,如果启动提示错误,需要需找原因解决。软件运行错误一般因.NET环境软件缺失、微软运行库文件未安装、驱动程序文件缺失、动态链接库文件缺失、操作系统的其他问题等。现在国内的PC操作系统多数GHOST版本,其中精简了不少的文件,这些精简的地方,可能会造成软件启动失败,可尝试通过一些系统缺失文件修复的办法,去修复系统的问题,再尝试运行BF软件。BF软件建议安装在微软Windows7 64位和Windows10 64位操作系统上。 2.下载安装飞控的驱动: 驱动安装分为调参USB虚拟串口COM驱动(用USB线连接飞控)和BOOT模式下刷固件用的USB虚拟DFU端口驱动,这是两个完全不同的驱动。 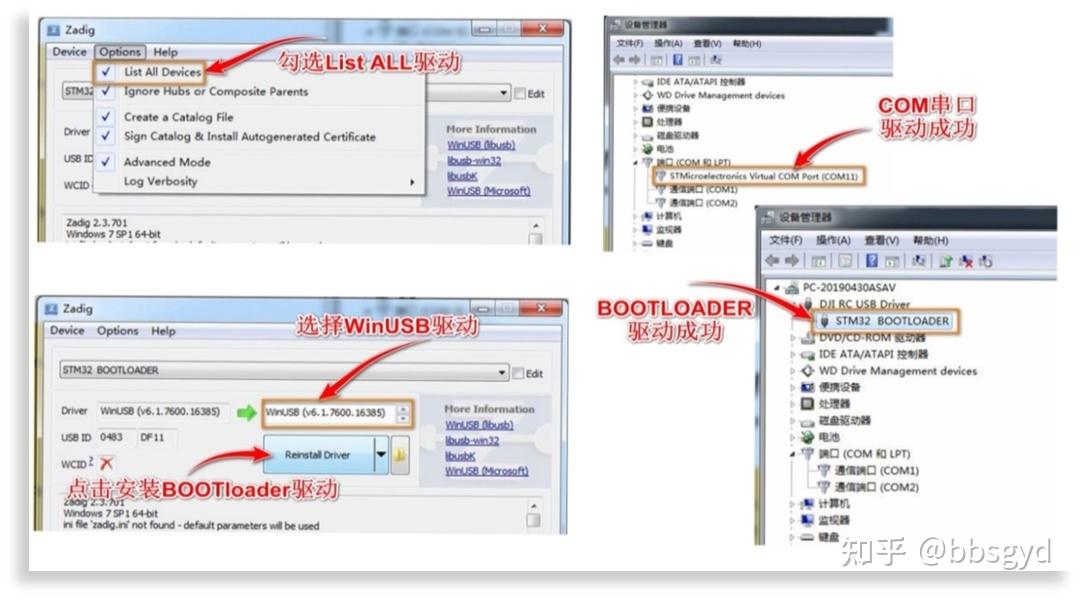 固件刷新模式驱动安装 固件刷新模式驱动安装安装正常调参模式的COM驱动,安装过程中如果出现怎么也装不好驱动,电脑设备管理器中的STMicroelectronics Virtual COM Port(COMxx)端口总不出现或出现了无法使用的情况,可以安装一个驱动精灵或360驱动大师,来帮你安装缺失的系统文件和这个驱动,解决驱动安装不了的烦恼。安装完驱动程序后,用一条质量较好的USB数据线来连接飞控,有时候数据线不太理想,会出现总是无法发现飞控设备的现象。 如果不需要刷写飞控固件程序,就无需安装Zadig驱动程序,只需要安装飞控的COM口驱动,即可进行飞控的联机调参设置工作。 第2节 设置页面 飞控接入电脑后,启动BetaFlight地面站软件,在软件的初始连接界面看到端口COMxx出现后(飞控驱动前面已安装好),点击“连接”按钮进入F4飞控的BF调参页面,开始对飞控的飞行参数进行必要的设定。  飞控调参软件捕获的COM11端口 飞控调参软件捕获的COM11端口恢复默认设置:进入BF调参界面,在设置页面下,点击“恢复默认设置”一次,这个操作将会把飞控内部的可变参数设定恢复到一个默认的初始状态,之前对飞控进行的所有参数修改都复位了,飞控需要重新设定参数,也可用原先备份的飞控设置数据恢复设置参数。  恢复默认设置、校准加速度计、备份 恢复默认设置、校准加速度计、备份校准加速度计:把飞机水平静置,点击“校准加速度计”一次。此时程序将会对陀螺仪加速度计做一个水平静止状态的校准,此基准参数将对以后的飞行产生影响,在自稳与半自稳模式下飞行,飞机在俯仰与滚转轴向的水平基准与此有关;因陀螺仪受震动和自身精度影响也可能使飞机产生水平倾侧和自动漂移现象;当使用按比例手动模式飞行时,因不进行加速度计水平基准参照比对,理想状态下不会产生水平倾侧现象。 备份参数:该按钮用于飞控调参结束后备份设置的参数,这些参数会生成一个文件,通过自定义文件名,可以很好地管理不同的飞机和不同设定参数备份文件。 恢复参数:用先前备份保存的调参设置数据文件来恢复飞控调参的配置参数,无需再次重新配置这些参数。这个界面下的恢复按钮仅限于恢复调参选项里的数据,无法恢复I/O配置参数和通过CLI命令行窗口输入的相关配置参数;因备份时无法备份那些通过CLI命令行输入的设定值,所以恢复时如有需要,还是得再次通过CLI命令行窗口对某些特别的设定值进行配置。 姿态参数观察:在这个页面上看到的飞行器姿态图示,转动飞机时俯仰、滚转、航向姿态将向对应方向变化,这里可以观察飞机各方向倾转姿态是否对应。 观察模型的俯仰、滚转、航向,如有不对应时,需要进入“配置”页面的飞控和传感器方向栏进行设置,通过选择不同的加速度计安装方向角数据,修正安装角度差异,保存重启后再次观察这个模型,直到这个模型倾转姿态和飞机真实变化方向一致为止。这项设定是至关重要的,它将使陀螺仪传感器确定正确的机头朝向,这样多旋翼飞机才能起飞。如果设置错误,模型与飞机姿态变化不一致,贸然尝试起飞将导致严重事故的发生!请遵循调参拆卸螺旋桨的重要提示!!  飞控陀螺仪姿态观察模型 飞控陀螺仪姿态观察模型解释上述新名词:俯仰、滚转、航向。 俯仰PITCH即俯冲和后仰(Y轴),飞机沿X轴向机头方向或机尾方向倾斜,飞机水平运动位置向机头前方和机尾后方改变,或者沿X轴发生滚转。 滚转ROLL也叫作横滚(X轴),即飞机沿Y轴向左或向右做水平角度变化,飞机水平姿态向Y轴的左侧和右侧倾斜;滚转时飞机水平位置会向着机头的左侧或右侧变化,也可以进行滚转,飞机沿Y轴滚转一周就是翻滚360°。 航向YAW也叫作机头方向(Z轴),当飞机静止或者运动中,改变机头朝向方位,就是改变航向角;机头沿飞机的Z轴自转一周,航向角改变了360°。  俯仰、横滚、航向轴示意 俯仰、横滚、航向轴示意第3节 端口页面 软件提示:并非所有的端口开启组合都是有效的,如果飞控检查到某组合不能同时工作,对应串口的设置将会被重置,设置无效。注意:千万不要关闭第一个串口的MSP选项,否则你可能要重新烧录固件并清空(丢失)所有设置,这是连接电脑的端口,关闭它将会很麻烦,如此郁闷的事情请勿纠结和尝试!!!  飞控端口示意 飞控端口示意默认接收机端口有时会被隐藏,不出现在列表里,无需开启任何端口就能使用默认接收机端口,对于大多数飞控来说,连接串行接收机需要开启对应的物理端口;UART端口就像一台电脑的外接扩展口,可以连接许多功能设备,关于UART端口的使用,需要新同学多了解飞控和外设的各种应用知识,掌握相关器件特性才能良好运用。 第4节 配置页面 软件提示:并非所有的功能都能同时被启用。当飞控检测到有冲突时会禁用相应的功能,设置无效。注意: 请在端口页面先设置串口并开启正确,重启飞控后再启用需要用到串口的功能,就是说需要分两步进行设置。  混控-动力布局、系统设置页面 混控-动力布局、系统设置页面混控类型:就是飞机的动力布局。四轴飞行器常采用Quad X布局,注意看这个混控类型的电机定义编号和电机旋转方向,硬件组装时调整电机旋转方向就是针对这混控类型的要求来做的,不同的混控类型电机旋转方向可能不一样。 系统设置:主要是开启加速度计,设置陀螺仪的更新频率和PID循环更新频率;所选的数值越大,采样速率越高,飞机的动作就越细腻灵敏;对于大轴距的飞机来说,使用较低的陀螺仪更新频率会使飞行动作更稳定顺滑易于操控,因为减少了采样和处理频率,调整飞机姿态的电机转速变化更慢一些,会更省电。  电调电机、飞控传感器方向 电调电机、飞控传感器方向电调电机功能:通常四合一电调使用DSHOT协议,不同类型的电调要选择不同的协议;支持PWM协议的电调,需要进行油门行程校准后才能正常工作。 飞控和传感器方向:这里的设定关乎飞机是否能飞起来,在飞控初始化一节里有介绍关于观察飞机姿态的内容,如果实际晃动飞机时的姿态方位和界面上模型姿态不一致,就在飞控和传感器一栏选择加速度计陀螺仪方向,保存重启后再去观察模型姿态方位变化,直到模型姿态和飞机姿态方位变化完全对应为止,如果错误地设置这个参数,油门一加,还没有飞起来飞机就炸掉了。 加速度计微调:只可以调整横滚和俯仰的固定漂移量,如果发现飞机水平姿态始终向着一个方向跑偏,可以试图通过这里预置一个期待值参数来调整它。 横滚微调:正数为水平向左角度修正调整,负数为水平向右角度修正调整。 俯仰微调:正数为俯冲方向水平角度调整,负数为后仰方向水平角度调整。  加速度计、个性化设置 加速度计、个性化设置个性化设置:给飞机起一个名字,英文加数字的,方便保存设置导出文件时辨别它,发现这里的输入内容不支持中文。 摄像头角度设置:在FPV飞行阶段时进行的设置;此参数可以设置为15-35°,能在FPV飞行时增强飞机的过弯操控手感,目视练习时感觉不到。 接收机设置:使用串行数字接收机模式,选IBUS协议,这也是富斯FLI14+接收机的协议参数。接收机、遥控器、飞控接收机模式设定需要三为一体对应,否则无法进行信号识别,就算正确开启了飞控的接收机端口,总是不能检测到接收机信号,接收机协议不对应是无法正常通信的,许多新手总是被卡在这里,久久无法成功连接。  接收机、RSSI设置 接收机、RSSI设置RSSI接收机信号强度回传设置:是把接收机当前接收到的遥控器发射信号强度数值,通过接收机回传通道传输到遥控器上,这也是遥控器自动调整发射机功率的依据,同时也告诉操控者,此时飞机端收到的遥控器发射信号强度值,作为是否可以继续飞远的参考,FLI14+接收机不需设置,因此型号接收机无回传RSSI功能。  其他功能设置 其他功能设置其他功能设置栏:开启LED_STRIP彩色RGB LED灯带,如图所示的其他选项也可开启;信标配置按需要开启;蜂鸣器设置可以全部打开。 第5节 电力&电池 电池与电压计设置栏:依照图示设置,飞行中当动力电池的单芯换算电压低至3.6V时,飞控通过BB响发出BB..BB..BB的响声提示低电量告警,并在图传视频画面上显示低电压提示字符,飞机当立即返航降落更换电池;当电池电压低至3.5V时BB响告警器发出更紧促的报警音,提示电量将要耗尽,飞机距离较远时可能会电能耗尽摔机。  电池监测设置 电池监测设置一般穿越机将电池单芯电压设置到3.65V,最低单芯电压设置在3.60V。 第6节 接收机 接收机的设置页面,如果正确进行了遥控器、接收机、飞控接收机选项、接收机端口这四个环节设置,在这里是可以看到遥控器各通道的杆量数据。  接收机监测与摇杆参数设置 接收机监测与摇杆参数设置这里所显示的横滚A、俯仰E、方向R、油门T、AUX1、AUX2数值就是当前遥控器的脉宽参数;其中横滚、俯仰、方向这三个观测项里的摇杆中位数值需要一致,如果它们不相同,飞机会难于控制,可通过遥控器上的通道微调按钮调整它们,使它们都显示为1500数值或其他相同的摇杆中位数值,如上图的1502。 重要提示:飞行前阅读文档的失控保护章解并且配置好失控保护。在配置页面配置好接收机串口、接收机模式(serial/ppm/pwm),接收机厂商;在设置接收机前需要先将接收机与遥控器对频;在接收机页面左边的摇杆通道信号可随着摇杆变化后,再设置遥控器通道的摇杆低位闸值、摇杆高位闸值,让它们介于1000到2000之间;设置通道映射AETR1234;设置中位值(默认1500);微调遥控器的AER三个通道数值到1500;配置摇杆死区数值;确认当遥控器关闭或超出范围时接收机的行为(失控保护)。  富斯FS-i6X遥控器 富斯FS-i6X遥控器设置摇杆低位闸值、摇杆高位闸值,这两个参数关乎到是否能够顺利解锁电机。 摇杆低位闸值:先观察横滚、俯仰、方向三个柱状观测项里最低数值,如观察到最低数值是1000,则可设置摇杆低位闸值为1050,也就是说这个参数必须设置得比观测到的最低数据要高一些;如设置的数值低于观测最低值如990,则无法解锁电机。 摇杆中点:是遥控器摇杆居中时的参数,如1502,如果这个数值未正确设置,飞机将难于控制,表现为飞机总是会出现各个方向的漂移摆扭,就像地上喷着水的软水管一样随意乱扭,或者总是向一个方向上飘移。 摇杆高位闸值:同理于低位闸值参数的设置,需要把数值设定得比最高杆量低一些,如观测到最高杆量数值为2000,则可设置摇杆高位闸值为1950。 重点:观测遥控器摇杆有效行程脉宽数值时,需要将遥控器左右摇杆以最大杆量来回拨动。如果将低位和高位闸值参数设置在观测到的最低和最高杆量数值区间外,将无法解锁电机,当扳动解锁开关时会听到蜂鸣器发出滴-滴-滴---的响声以提醒遥控器杆量不在有效行程范围,禁止解锁;油门摇杆未置于最低位置也无法解锁。 第7节 遥控器的设置 为配合接收机而设置的新增内容。遥控器的设置是至关重要的环节,无论使用什么遥控器,都需要去新建模型参数,正确地设置参数才能让飞控收到接收机信号。 对遥控器的功能菜单理解和设置,是航模新同学必不可少的基本功课,对遥控器知识一穷二白的初学者需要多安排些时间,来学习关于遥控器设置项相关的知识。遥控器设置关系到飞机调测是否顺利,这是穿越机基础技能的重要组成部分。 入门练习常用的富斯FS-i6X遥控器设置菜单较为简单,面板上有六个开关按钮: 1、POWER为电源开关;OK为确认(长按、短按)。 2、CANCEL为保存或者返回(长按2秒保存设定、短按为返回)。 3、UP为向上;DOWN为向下。 4、BEND KEY对频为接收机对频模式,按住该按钮后开启遥控器电源进入RX Binding..等待接收机通电自动对频,接收机通电前需要按住对频键,对频完成后关闭遥控器再次打开,接收机指示灯应常亮。 遥控器的模型设置: 遥控器开机后再长按OK键2秒后进入菜单MENU,里面就两个图标,一个SYSTEM“系统”,另一个SETUP“设置”。 遥控器system系统设定: 短按一下ok键,在system下需要设定的常用项有: 1、在Model select型号选择下,短按OK键进入选择型号Model 01,FS-i6X可存储20组不同的模型数据,长按CANCEL键2秒保存设定并自动退回上级菜单。 2、在Model name型号名称下,通过选择不同英文和数字,给01号型号起个名字方便记忆,最后长按CANCEL键2秒保存设定。 3、在Type select类型选择下,四轴默认为Airplane or glider飞机或者滑翔机。 4、在Model copy复制模型下,可通过复制已设置好的一组模型数据快速建立新的飞机模型,进行接收机对频后,同类型的模型可以直接使用。 5、在Model reset复位模型,复位模型数据,所有参数需要重新设定。 6、在RX setup接收设置下,AFHDS 2A里使OFF变为ON,开启该协议模式;在PPM output PPM输出下,使OFF变为ON,开启PPM输出模式,OFF匹配PWM模式接收机;在i-BUS Setup IBUS设置下,设置为CH1,用1通道作为IBUS协议的信号传输通道,接收机通道1连接到飞控的接收机焊盘上。 7、在sticks mode摇杆模式下,选Mode2,这是左手油门美国手摇杆布局。 8、在Factory reset恢复出厂设置下,全部模型的参数和接收机设置将丢失。 其它项无需设置,如想了解其它未进行说明的项的作用,可以专门去学习关于遥控器菜单功能的相关资料,富斯官网地址https://www.flysky-cn.com/。 遥控器的STUP设置: 短按一下ok键,在SETUP下需要设置的项: 1、在Reverse通道翻转下,可以进行各通道的翻转设置,这里全部为NOR。 2、在Een points通道范围下,设置通道的高低范围,通常无需更改,但如果是使用PWM协议外接舵机或者云台,需要调整这个参数的范围适应外设控制。 3、在Display显示下,可以观察到所有通道的实时杆量变化值图示,如果已经设定了AUX通道对应开关,这里拨动开关时可以看到它们的变化;重要提示:本界面如果长按CANCEL按钮2秒将进入通道杆量自检演示模式,所有的通道杆量将从中位向最高再向最低自动变化,如果此时飞机还是解锁状态,那就危险了!飞机会突然加大油门并螺旋飞高逃逸,无法控制,千万不要在飞机接通电源时开启通道自检,这个遥控器固件的设计逻辑有问题,请牢记,避免这样开启它。 4、在Aux. channels辅助通道下,设置一个两档开关在5通道上,如5通道SWD开关,6通道SWC开关,7通道SWA开关,8通道SWB开关,9通道VRA旋钮,10通道VRB旋钮,设置完后常按CANCEL键2秒保存返回。5通道的SWD两挡开关将用在BF调参里给飞控解锁电机,6通道SWC三挡开关用于切换飞行模式7、8、9、10通道可用于开启飞控的其它功能。 5、在Subtrim中立点微调,如果某个遥控器的中立点偏差太多,可以在这里调整它,让1/2/3/4通道的中立点达到同一数值。 5、在Dual rate/exp双率比例下,如果你不理解,请不要进行调整。 6、在Throttle Curve油门曲线下,它可以让油门行程中的摇杆量不按照平均比例变化,调节它可使油门量更早提升或降低,如果你不了解,请勿进行调整。 7、在Mix混控下,多旋翼飞机无需设置混控,默认值。 8、在Elevon升降副翼下,多旋翼飞机无需设置副翼,默认参数即可。 9、在V tail V形尾翼下,多旋翼飞机无需设置尾翼,默认参数即可。 10、在Switches assigns开关分配下,多旋翼飞机无需设置,默认参数即可。 11、在Throttle hole节流板下,多旋翼飞机无需设置,默认参数即可。 12、富斯FS-i6X修改通道数量,在英文菜单下进入SYSTEM 系统设置–AUX SWITCHEN开关通道,在下方的CH处修改6为10,长按2秒面板上的CANCEL按钮保存设置。遥控器被默认只使用6个通道,需进行通道数修改。 以上的富斯FS-i6X遥控器需要设置和注意的地方已经详细说明,如需了解遥控器其他方面的知识,可在互联网上查找相关知识学习累积。穿越机使用的开源程序遥控器,功能更多,设置更为复杂,学习中需要更多的时间去摸索掌握。 遥控器是穿越机的重要组成部分,而不同品牌不同价位的遥控器,其功能基本都是一样的,区别在于发射功率的大小和通信距离的长短,或者再多0.1%的可靠度。一个刚往穿越机世界里进发的新手,通常不具备相关经验,对遥控器没什么清晰的概念,购买遥控器要选择大品牌的产品,因为它们的产品可靠度高,设计更合理,后续使用中的问题更少,谁也不想在遥控器上问题中耽误太多时间。 常见遥控器品牌有:富斯FLYSKY、乐迪Radiolink、扶他把FUTABA、天地飞WFLY、麦克Micro、华科尔DEVO、大疆DJI、Jumper开源、Radiomaster开源等。 无论使用什么遥控器,都需要花些时间去理解遥控器的设置和对应的作用。 第8节 模式页面 飞控的模式设置 先来了解一下几个常用模式范围设置的作用,再开始进行设置。 1.ARM电机解锁,档位开关使电机处于解锁、关闭状态,解锁后电机怠速旋转。 2.ANGLE姿态自稳模式,感度较低且锁定了飞机倾斜角度,新手入门阶段练习用。 3.HORIZONG姿态半自稳模式,感度较高;在一定角度内,如小于30°时是ANGLE模式,在大于30°时是ACRO模式,这个界限也不是突变的,而是是渐变的,具体参数在PID Tuning Tab - Angle/Horizon - Angle Limit中设置角度值,此模式下可以做姿态自稳飞行,也可以做翻滚动作练习使用,翻滚难度低对新手比较友好。  模式设置页面 模式设置页面4.Manual mode按比例手动模式,在模式设置界面没有出现,当设定的三挡AUX开关脉冲落在非ANGLE和HORIZONG模式范围时,就是全手动模式了。该模式下飞机处于无水平自稳状态,任何俯仰与横滚角度的改变后,需要再次回到水平姿态上,得往相反方向打杆,可能需要经过几次小幅度的来回修正后,飞机姿态才能回到水平状态,新手必炸,谨慎使用。建议新手先练习自稳操控,娴熟后再尝试练习全手动模式。 模式页面:设置ARM解锁、ANGLE自稳、HORIZON半自稳飞行模式开关。  模式设置-BB响开启模式设置页面 模式设置-BB响开启模式设置页面黄色区间为开关档位处于有效状态,灰色区域为无效区域,拨动遥控器的通道对应开关,拖动滑动条限定一个区域,其他功能模式开关设置往下看。 其他功能模式开关设置: Headfree无头模式,无论机头转向任何方位,都以开启时的机头方向为准。 Failsafe失控,设置一个开关,当触发时执行失控界面设置的飞行设定动作。 Headadj重新指定无头模式的方向,建议不使用在FPV飞行中。 Beeper蜂鸣器,设置一个开关,当需要找飞机时开启,告警器会发出声音。  模式设置-LED、黑匣子、OSD、AIR MODE页面 模式设置-LED、黑匣子、OSD、AIR MODE页面Ledlow LED外置灯带,设置一个开关来开启或者关闭它,常开也可以。 Osd sw OSD锁定,通过一个开关,让OSD画面上显示出文字或者关闭文字。 Blackbox飞行记录仪,黑匣子,如不设置开关,飞机解锁就一直记录着。 Air mode空中模式,油门收到底电机不停转,就是在空中0油门PID依旧工作,飞机仍可控制,增加了飞机的滞空能力,尤其是做翻滚动作时,实际效果就象你的四轴失去了重力犹如漂浮在空中一样,可以叠加到手动,自稳、半自稳任何一种飞行模式上,全手动+AIRMODE+SUPER EXPO或RATE组合更能发挥自由式飞行特色和作用,通常开启于全部三种飞行模式中;在自稳模式或目视花飞中一般不使用AIR MODE,可关闭它。 FPV ANGLE MIX FPV视角混合,飞FPV时开启,补偿横滚、航向水平姿态,增强过弯。 Blackbox Eras黑匣子擦除,记录仪的存储容量只能记录几分钟的飞行数据,数据满后不工作;可设一个AUX开关,开关一次即擦除飞行记录仪内容,以便重新开始记录。 Camera control1摄像机控制器1,用旋钮或开关来控制摄像头拍摄启停。 Prearm预解锁,电机解锁保险开关,先开启它才能开启解锁,就是电机解锁双保险。 VTX PIT MODE图传小功率模式,飞控与图传板需要连一条数据线控制功率值。 Paralyze瘫痪模式,很实用一个功能,炸机开启后飞机无法再解锁电机,避免误伤,飞控需要断电重启后才能恢复到正常状态。  模式设置-其它设置页面 模式设置-其它设置页面ACRO TRAINER角度限制模式,通常会限制在一个安全的角度值,新手练习时使用。 FLIP OVER AFTER CRASH突然翻转,反乌龟模式,电机向相反的方向转动,需要双向电调支持才可以使用,炸机不用捡,竞赛时建议开启。 其他飞控固件可能用到的功能模式设置说明: Turn assist电机制动,电机在收油门时没有惯性旋转,有反向制动功能,特技机用。 Heading hold航向保持,航向锁定,具体作用可以开启测试体会一下就好。 Nav althold高度保持,通过气压计来测量大气压强数值,高度保持不变。 Surface水平面,以海平面为基准水平。 Nav poshold定点飞行模式。 Nav rth卫星导航返航模式。 Nav wp导航模式,使用GPS定位器到达目的地。 Home reset重新定位返航点。 Gcs nav 综合分布。 GPS RESCUE GPS救援模式,启用后当拨下开关,启动GPS救援模式。 TELEMETRY打开或关闭回传数据(也称为遥测数据)。 RATE模式 入门练习阶段使用的模式。 LAUNCH CONTROL一键弹射起飞,油门在设置值时飞机弹射起飞。 ANTI-GRAVITY反重力模式,一种飞行PID机制。油门值快速变化时,可减少突然的俯仰下降,油门变化很大时补偿一点,通常是通过提高I term的增益,I term将在其余的飞行中保持不变,使用该功能需要在Configuration中配置后才会在ModeTab里出现。 Killswitch自毁,坠毁模式,失控时选择坠毁。 GTUNE调参,通过数传或者遥控器组合通道进行飞控飞行参数调整。 AMG启动罗盘锁尾,直升机固件中的常用功能。 BARO气压定高,用于航拍类飞控固件,启用后依照测量大气压强数值自动定高。 NAV LAUNCH为手抛模式,固定翼飞控的手抛模式。 第9节 PID参数设置 PID页面可以设置3组9个不同的数据,方便飞行时切换使用不同的参数。外场变更飞行参数可以使用笔记本电脑、手机、遥控器摇杆组合调参几种方式,手机调参需要飞控板集成蓝牙无线收发器或者通过飞控外设接口接入一个蓝牙设备。 PID设置的上面两行一个是横滚ROLL,一个是俯仰PITCH,也就是x y轴,第三行是YAW是Z轴航向,用于旋转机头。预设的PID参数需要依照飞机的轴距大小、电机参数、电调参数、电池参数、飞机起飞重量、螺旋桨参数来综合考虑,在低、中、高P参数上都设置一组预选;通常在在15-35-55之间各设一组对应P预选;I值在10-25-45各设置一组对应P的预设。  PID设置页面 PID设置页面电机动力强时P、D的参数值越小,如2306KV2750电机PID 23、15、25;电机动力弱参数可更大,如2204KV2300电机PID 40、30、45等。  PID设置页面 PID设置页面PID理论基础简述: P理解为发起期待飞行动作,也就是如下图的预期值1,D争取去一次执行到位,但D总是可能力道不够或者力道太大,如果D力量不够可能到达不了1,如果太大就会快速越过1; I使PD的关系量偏差得到合理修正,如果P和D配合得很协调了,I值可以很小;I在这来回调整中分别促进和减弱PD的值,直到D更贴切地完成P的要求;I在P与D之间总是相对作用,当P值向理想目标1进发时,I促进P以更快到达1,I此时减弱(阻值)D值;当P大于1后出现超调,回调时I又减弱P值促进D值。 动力一定时,P的数值越低,飞机进发意图越低,到达目标姿态1的时间越长。P数值越高进发意图越大,容易造成更高的超调现象。对于大轴距飞机,P值可以设置得低一些如15-40之间;小轴距的210穿越机一般在25-85之间;竞速机型通常会将超调比例调得比较大,这样飞机的动作很容易到位,对于过多的姿态调整会被下一个动作覆盖,竞速穿越机回调到1的可能性不大,因为接连着的动作改变实在太快了。  PID越阶图 PID越阶图PID值分解:D值太低进发动作执行力度不够,P期待的姿态目标难以执行到位,飞机容易摆动,如姿态角度变化太大易失控;通常210mm小轴距飞机D在15-25之间是低值区间,这针对动力较强的电机可以正常飞,动力弱的电机可能就无法正常飞。 D的高值在60-85之间时,这样的D值,在2306KV2600暴力电机下动作执行力度超期待,显得飞行动作较狂暴,动作容易执行过头,往回修正时也总是执行过头,难于快速控制到期待值1附近;每个动作执行中总是这样来回不断修正,电机容易发烫,同时也比较耗电。如大轴距9寸穿越机使用2312电机时,电机动力较弱可适当加大些D。花飞穿越机D值预设值可参考设置在35-65之间,建议D在25-55之间较为合理。 I值就是动态修正期待值P和执行力D值之间的误差,如果P和D都配合完美,I就可以为0了,当然这是很难达到的。通常不同的动力方案这些参数都不一样,每个人的操控习惯和手感也不一样,以试飞时飞机动作跟手为佳。 调整PID是一个循序渐进且耗费时间较多的工作,新手大致设定一个基本稳定的参数进行练习,待操控能力和感知能力提升上来时,再去花时间琢磨更精细的PID参数设置,让飞机更好飞。新手小贝也不用一上来就研究PID的精细调整,因其他各方面的能力没上来,也不知道调到什么状态为最好,那也是白费功夫。 第10节 滤波器参数的设置 滤波器的设定是为了解决那些因为硬件缺陷而产生的共振和抖动,滤除不需要的陀螺仪传感器取样频率区间,只让陀螺仪采样有用的姿态数据,让飞控计算出有用的电机执行数据,不让电机去执行那些无用振动产生的动作,让飞机具备更好的锁定感,飞行操控动作执行快速到位;这也会让电机温度降到最低,极大减少飞行电池的电量消耗。陀螺仪滤波器全部开启的飞机,机架性能通常会很差,滤波除必要开启的几个外,越少开启时飞行动作延迟会越小,飞机可操控性更好。 硬件滤波:陀螺仪低通滤波器、D Term波滤波器必须开启,否则飞机没法飞。  滤波器设置图 滤波器设置图硬件滤波器就是用来过滤并忽略掉某些振动频率,不对其进行采样;怎么才能知道哪些是因振动产生的干扰频率呢?通过Betaflight Blackbox Explorer软件,查看飞行记录数据,观察振动固有的一些特性波形图像,对应地设置需要滤除的振动频率参数,就得到了较为理想的采样数据,再交给运算器去计算出电机执行数据。硬件滤波和软件滤波之间是相辅相成的,硬件滤波之后采集的姿态数据更纯净,交给运算滤波器可以更有效地得出执行数据,但是过度进行硬件滤波,会造成输入取样参数的细节缺失,对于最终得出的有用数据来说也不是一件好事。 运算滤波:D term必须开启。D term陷波滤波器、偏航低通滤波器、RPM滤波器等根据需要开启。采样数据在进行运算的过程中,仍然还是会有一部分未能被滤除的振动频率加了进来,导致运算噪声数据出现,这时就需要使用运算滤波器来进行一定的处理。科学合理的设置运算滤波器,可以使硬件滤波器少滤掉原始采样数据,更完整的原始采样数据可以使最终得出的运算结果更精准,让电机执行起来更简单有效。 滤波器的正确设置可使PID调试更具效果,它也是PID参数调整的一个基础。 硬件滤波器设置: 陀螺仪的硬件滤波器设置根据能高就不低原则,通常陀螺仪低通滤波器1截止频率在100Hz以上(小轴距机架和PWM电调协议下建议截止频率设置为150Hz以上),特别烂的抖晃机架和歪轴电机、变形的桨可设置到60Hz,太低了飞机没法飞。这是让低于设定值的频率通过采样,进入运算环节;软硬件滤波器都是低通滤波器。 陀螺仪低通滤波器设置: 陀螺仪硬件低通滤波器1截止频率通常设置为100Hz-120Hz。 陀螺仪硬件陷波滤波器1中心频率,需要根据飞行数据记录仪里的试飞数据来确定,依据震动频率精准设置,如果没有飞行记录数据依据而打开它,胡乱设置一个参数是没有什么用的,不如关闭它。  滤波器设置图 滤波器设置图如果陀螺仪硬件低通滤波器1截止频率设置为50Hz或者更低的话,建议在设置-系统设置里,陀螺仪取样更新频率选项,将它设置为2K,这也足够用了,9寸桨的大轴距飞机使用1K也能飞好,210轴距飞机可设为2-8K采样,PID循环更新频率通常为陀螺仪更新频率的1/2至1/3,竞速5寸机陀螺仪采样设为32K也不会觉得高,但这样会增加运算处理器的负荷,需要更高频率的处理器芯片配合,如F722单片机处理器。  系统设置-陀螺仪采样参数 系统设置-陀螺仪采样参数运算滤波器设置: D term低通1截止频率通常也设置为100Hz(PWM电调协议建议120-150Hz),飞机的机架很烂时,陀螺仪低通滤波器1的频率可以设置更低一些60Hz,这一项通常在调试时是一定要打开和设置的。设置较低参数是,试飞如果失控,要及时关闭电机。 D term陷波滤波器中心频率,需要根据飞行数据记录仪里的试飞数据来确定,依据震动频率精准设置,如果没有飞行记录数据依据,不如关闭它。 偏航低通滤波中心频率设置为100Hz,这里的参数对飞行影响不大,有可能设置到30Hz也不会有明显差别(PWM电调协议谨慎设置这些参数,太低易失控)。 第11节 LED灯带的设置 在BF调参软件的“配置-其他功能”界面设置LED_strip,彩色RGB LED灯带开启,再到CLI命令行页面输入LED的指令,保存重启后生效。  配置-LED灯带、OSD开启 配置-LED灯带、OSD开启BF固件的LED尾灯参考命令行 (F4飞控BF固件通用) # led led 0 0,15::CTONIW:3 led 1 0,14::CTONIW:3 led 2 0,13::CTONIW:3 led 3 15,15::CTONIW:3 最后输入Save回车保存,写入飞控的EEPROM,飞控自动重启生效。 如果上面的命令行不能正确设定开启LED灯,可以通过这个图形界面编程界面使用布线模式来设置LED灯颜色和开启,设置逻辑为选择需要定义的灯珠坐标,设定灯珠功能、叠加功能,设置遥控方向、灯珠颜色,取消布线模式,保存。部分灯带的控制有所不同,具体操作请自行琢磨并多进行设置练习。在竞赛中,一般都会规定设置机载LED灯带,并显示一种固定的颜色,以示区别,所以,每个飞手都应当能够快速而正确地设置飞机的LED灯带颜色。  LED灯带编程 LED灯带编程第12节 电机设置 在电机页面,可以看到一个流动的波形状态数据窗口,这是陀螺仪传感器的监视窗口,晃动飞机时,这些数据会随即产生变化,刷新间隔一般为20ms,比例2000。  电机测试与PWM电调协议的油门行程校准界面 电机测试与PWM电调协议的油门行程校准界面电机界面可以用来测试电机转动方向和飞控的电调控制通道是否对应;在RPM滤波功能正确开启时,也可以用来观察电机的旋转速度RPM(转速/分钟)。使用电机界面测试电机前请卸下螺旋桨,以免发生重大意外事故!!! 使用本页面时,飞机需要接上电池,四合一数字电调不需要做电调油门校准,只需要测试好每个编号的电机旋转方向是否正确即可。PWM协议的电调需要在这里做电调的油门行程校准,就是定义电调最小输出至最大输出之间的行程;主控制滑块从0至100,相当于遥控器油门摇杆的0至100的杆量脉宽。 PWM协议电调油门行程校准:具体操作为~飞机不接电池~用USB线把飞控接入电脑~进入BF调参软件的电机页面~点开“我已了解风险”开关~把“总控制”拉到最高~此时给飞机接上电池~听到电机唱歌或者短促哔一声或者两声提示音时~快速将“总控制”拉到最低~等听到电机唱歌或者短促提示音结束后~关闭“我已了解风险”开关~断开电池,电调行程调校步骤完成。这是就可以再次给飞机接上电池,测试电机旋转。 PWM协议电调如不进行电调油门行程校准,是无法正常使用的。校准时电调发出的短促提示音1声、2声、3声为进入选取磁力角度值,一般选1声或者2声,听到相应响声后立即拉下总控制滑动条到最低即可。磁力角度值设置不同,电机反应不同。 第13节 OSD屏幕叠加显示  OSD字符叠加设置页面 OSD字符叠加设置页面OSD字符叠加是由一个独立的软硬件单元完成的,穿越机飞控通常都集成了该单元,它将摄像头拍摄的图像,叠加上飞控的飞行相关数据,再输出给图传发射机进行编码发送,地面图传接收机收到的图像,上面会附着那些被叠加的字符,使操控者可以即时获取飞机的飞行数据。OSD需要设置的选项有单芯电压、电池低电压告警、油门值、飞行时间、飞行模式、地平线这些数据,设置太多屏幕显得杂乱,FPV飞行时不好看画面。如果飞控启用了遥控器调参设置,在起飞前可用遥控器对飞控进行飞行参数调整,一般是由摇杆组合进入调整模式,调整时,图传画面上会叠加调参相关字符,使调参状态可视化。数字图传接收机通过数传边带编码技术,将飞控的飞行信息与图像编码数据一并发送到地面接收机,解调后直接显示到屏幕画面上。 第14节 黑匣子设置 无SD卡槽的F4飞控通常会自带的一个16MB的存储器,可以存储几分钟的高采样率飞行数据,如果需要大容量的记录器,可以通过飞控外接端口安装飞行记录仪,或者使用带TF卡槽的飞控,并给飞控的TF卡插槽里装上4GB的存储卡,更大的存储卡一般不会被使用所有空间。  飞控内置16MB存储器芯片 - 黑匣子读取页面- 飞控SD卡槽插入16GB的SD卡 飞控内置16MB存储器芯片 - 黑匣子读取页面- 飞控SD卡槽插入16GB的SD卡F4V3S飞控标准版都带有TF卡槽,可以插入4GB的存储卡,飞控未集成飞行记录仪存储器芯片,如果未插入存储卡,板载SD卡会显示存储器不可用提示。 第15节 CLI命令行的使用 BF调参除了使用图形界面的选项来修改飞控参数外,还可以使用命令行来设置参数,这就需要使用CLI命令行窗口来输入配置命令行。 进入CLI命令行窗口后,如果要返回到其他的设置页面,飞控会重启,所以在你输入了许多命令行后,需要输入SAVE回车并点击保存按钮再离开,否则将不会保存输入的内容。许多常用的命令格式和参数,可在官网下载关于CLI命令行的文档,也可使用DUMP命令显示当前已经配置过的命令行和参数。 命令行可以用来设置端口开闭、指定中断、定义单片机的输入输出I/O针脚,配置LED灯带、BB响、接收机类型、PID参数、滤波器、电调电机参数等,可根据调测需要使用符合飞行要求的命令行和参数进行设置。 比如花飞机型可以尝试输入set rc_smoothing_type = FILTER回车,再输入SAVE保存,此命令行的功能是激活遥控器输入信号滤波器;作用为削除遥控器突然打杆带来的尖峰信号,让电机没那么热。还有,我们在前面设置LED灯带时使用的参数设置命令,就是在CLI命令行窗口里进行的。穿越机飞手需要熟悉CLI命令行的使用,对常用的命令需要随手就来,对输入的命令行,也需要明白它的作用,了解它对飞行带来的影响,这是一个常用的飞控参数配置工具。如果你曾经对黑洞洞的命令行窗口心生畏惧,那么现在,你需要勇敢去面对它,其实,你只要开始学习,就能慢慢用起来。  CLI命令行窗口 CLI命令行窗口学习穿越机技术,平时要多去进行飞行操控技巧的练习。飞行操控技能提升是所有努力合围的最终目标,也是穿越机学习的意义所在;所有的准备都是为飞行而生,让技术为飞行服务;磨刀不误砍柴工,飞行操控也还是从理论开始学习,不断去练习掌握,熟能生巧不断提高。飞行平台的硬件组装和飞控调试相关的基础内容,无论是理论还是实践,都需要许多时间去完成,在日积夜累中不断在这个方向上给自己添砖加瓦,时间会见证你的进步。 第五章 多旋翼穿越机飞控固件升级与输入输出I/O配置 第1节 认识飞控的系统软件 飞控的系统软件就是人们常说的固件,它是飞控固定不变的操作系统软件,它负责分配和管理飞控的硬件资源,通过运行内置软件,利用程序算法,运算解调陀螺仪采样的姿态数据和遥控器控制信号,输出指令让飞机按遥控器指令做动作。固件被写入飞控单片机内置的存储器中后,软件功能不能再被更改,不允许删除或者添加任何应用功能软件,系统软件就这么固定不变,所以称其为固件。刷固件就是给飞控重新安装一个更加新的或者更旧版本(更合适)的系统软件;固件擦除就是清除原有的飞控系统软件,也称为格式化;烧写就是擦除并写入新的飞控系统软件。飞控固件通常如Betaflight_4.3.1MNIBUSF4SD.hex文件,固件文件后缀名为.hex,它可以写入单片机存储器内被单片机执行;hex文件可以由许多种编译器将C语言程序或者汇编程序编译生成hex,它是一个16进制的ASCII文本文件,可用ultraedit、WinHex打开编辑,通常hex文件大小有几KB到几百KB甚至几十MB,穿越机飞控固件通常为几十KB。 第2节 飞控固件的升级准备 驱动安装:要对飞控的固件进行升级,需要安装固件升级专用驱动,并让飞控启动时进入固件更新模式,BF软件才能连接飞控的DFU端口进行固件更新。首先要下载zadig-2.5.exe驱动文件,这是用于飞控刷写固件的专用驱动。  固件更新模式DFU驱动安装 固件更新模式DFU驱动安装 安装DFU驱动后飞控进BOOT模式时调参软件捕获的端口 安装DFU驱动后飞控进BOOT模式时调参软件捕获的端口进固件更新模式的具体操作是:按压住BOOT按钮,再将飞控接通USB线,当电脑提示发现新硬件后运行Zadig安装驱动,电脑的设备管理器中会出现一个STM32 BOOTLOADER设备,此时启动BF调参软件可捕获一个DFU端口。网盘分享的飞控串口和DFU驱动地址:https://pan.baidu.com/s/17BXxoAosNj7E646-6yvPNg 提取码:bbbb。 BF飞控固件准备:下载STM32F405飞控新版本通用固件链接(可能需要出网破封技术)。 https://github.com/betaflight/betaflight/releases是开源托管库BF固件的发布地址,选择对应单片机型号的固件下载,固件文件的后缀名为.hex。固件名如F405SD、F745、F722等,分别对应不同的单片机芯片。网盘分享库链接:https://pan.baidu.com/s/1LqsKDwxfMXOfazhBOyxrMg 提取码:bbbb。 下载I/O配置文件:一般BF开源站点发布的是通用固件,刷新完固件后,因各飞控硬件厂家设计的电路不尽相同,可能导致I/O输入输出定义不一致,飞控无法正常使用;这就需要找到飞控板生产厂家发布的对应型号配置参数文件,用于恢复正确的I/O配置。BF飞控固件的I/O配置文件下载网址https://github.com/betaflight/unified-targets/tree/master/configs/default。 看到厂商名和飞控型号后点击鼠标右键,在浏览器的新页面中打开,看到下图的命令行后,将全部命令行复制并保存到一个新建的TXT文档中保存。如曼巴F405M2对应的配置文件名为DIAT-FURYF4OSD.config,点击打开后,看到从序号1连续往后排列的命令行,复制全部文字并保存为一个TXT文档待用。改文档为飞控硬件厂商提供的对应型号飞控基本输入输出配置命令行,如果飞控硬件没有改动,固件结构无重大变化,一般不会去更新它,所以,你会看到有很多飞控的对应配置文件是很久以前发布的,这并不会影响飞控的性能和基本输入输出资源分配,不用纠结它是哪时发布的。  飞控固件的config配置文件命令行 飞控固件的config配置文件命令行固件的版本要对应配置文件的版本,如果不对应,有些命令行在不同版本的固件里可能是无效的。 第3节 固件升级与I/O配置 启动BF地面站连接飞控更新固件(有点难度,小新可略过本章节内容) 1、 进入BOOT固件更新模式:  DFU端口捕获 DFU端口捕获BF调参软件更新飞控固件的关键一步,是正确安装飞控的DFU模式驱动程序,调参软件上要出现DFU端口才能更新固件。先按压飞控板的BOOT模式按钮,再将USB数据线连接飞控,有些飞控可能需要一直按压BOOT按钮5-10秒时间。进入BOOT 固件更新模式后,飞控的状态指示灯会红色长亮,此时BF调参软件捕获一个DFU端口。 点击BF软件上的“更新固件”按钮并等待不少时间,待显示固件烧写工具界面时,打开“显示非稳定版本”开关,打开“无需重启”开关,打开“全盘擦除”开关,打开“手动设置波特率115200”开关;接着点击右下角的“从本地电脑加载固件”并选择已经下载好的BF固件,进行固件更新;请勿在BF软件上刷入CF或者其它类别的固件,这样做飞控会变砖失联,这往往会让新手抓狂。 刚接触到飞控时,新同学对许多名词都是很陌生的,需要多花时间去了解这些专用名词,以此为基础才能做到事半功倍效果,加快后面的学习进度。 2、加载固件:  加载固件的文件操作 加载固件的文件操作在烧写窗口里加载好固件后点击“烧写固件”开始擦除存储器并写入固件程序,直到完成后飞控自动重启。再次联机后飞控自动进入调参模式,端口捕获为COMxx后点击BF调参软件右上角的“连接”按钮,进入调参界面。 3.配置飞控专用的资源配置文件config:因使用了通用固件,导致大部分飞控更新完固件后在BF设置界面上的“校准加速度计”按钮为灰色,接收机及其他外设都没法接入问题,这是因为该固件导致飞控的硬件资源定义配置与飞控板配置参数不一致造成,这时只需用飞控厂家提供的Configs资源配置命令行,在BF调参软件的CLI(命令行)界面输入并回车, SAVE回车保存重启飞控即可恢复正常状态。 4.飞控config命令行显示命令DUMP:在飞控BF调参软件的CLI命令行窗口输入DUMP命令并回车后,能看到该飞控固件支持的配置命令行和配置参数。全部复制它们保存到一个TXT文件中,以备不时之需。当你拿到一个新的飞控板时,需要在更新固件前做这个备份,更新固件万一失败了,还可以再刷回原先版本的固件,再用这个配置命令行恢复I/O配置,让飞控还原到原先的状态。 学会刷新固件后的I/O资源配置方法,新手对于各种固件的尝试就更轻松了,飞控也没那么容易变砖,心理压力也没那么大了。 第六章 多旋翼穿越机高级调参 (限于入门基础一文的篇幅,本章请参阅《穿越机高级调参技能》一文) 第1节 穿越机PID基础 第2节 飞控黑匣子的使用 第3节 Betaflight Blackbox Explorer使用 第4节 PID-Analyzer使用 第5节 电调软件的使用 第6节 RPM滤波器的使用 本文到此结束,以下为附件文本。 附件1: 穿越机飞控开源软件下载链接文档广西百色市右江区 郭远东 微信bbsgyd V2022.01.01 1飞控调参软件 开源飞控BF地面站调参https://github.com/betaflight/betaflight-configurator/releases/ F4飞控相关软件链接:https://pan.baidu.com/s/18_4Ctg4PlWlpOCYt-lwpVw 提取码:v8v8 飞控驱动地址,F405驱动链接:https://pan.baidu.com/s/17BXxoAosNj7E646-6yvPNg 提取码:bbbb 2飞控固件更新地址 开源飞控BF官方固件下载页面https://github.com/betaflight/betaflight/releases 分享库链接:https://pan.baidu.com/s/1LqsKDwxfMXOfazhBOyxrMg 提取码:bbbb 3飞控底层I/O配置文件config地址 https://github.com/betaflight/unified-targets/tree/master/configs/default 刷新固件后的CONFIGS配置文件代码页面,根据飞控的厂牌和型号来选择.config文件,点击对应飞控名称后,将显示的命令行复制下载,保存到新建立的一个txt文本文件里,可看到命令行前有相关厂牌名称和飞控主控芯片型号。 4电调更新固件地址 JazzMaverick的固件存储库(BLHeliSuite16,后缀名.hex文件):https://github.com/JazzMaverick/BLHeli/tree/JazzMaverick-patch-1/BLHeli_S%20SiLabs 网盘16位电调链接:https://pan.baidu.com/s/1s6nk2acbKTWy947-2yUHMA提取码bswh BLHeli_S16位https://github.com/bitdump/BLHeli/tree/master/BLHeli_S%20SiLabs/Hex%20files BLHeli32位电调开源包:https://github.com/blheli-configurator/blheli-configurator/ 32位电调固件地址: https://github.com/bitdump/BLHeli/tree/master/BLHeli_32%20ARM/Loaded%20startup%20testcode https://github.com/bitdump/BLHeli/tree/master/BLHeli_32%20ARM/Rev32.8.3%20testcode/ 5电调固件烧写软件地址 电调的调参软件网盘:https://pan.baidu.com/s/1s6nk2acbKTWy947-2yUHMA提取码bswh BLHeli_32位电调的调参软件:https://github.com/bitdump/BLHeli/releases 6PID调参软件地址 黑匣子Betaflight Blackbox Explorer飞行记录仪数据查看软件 黑匣子网盘:https://pan.baidu.com/s/1vb3A2ua-_SYUYgjt0AmrZQ 提取码:bbbb 黑匣子官网:https://github.com/betaflight/blackbox-log-viewer-nightlies/releases PIDAnalyzer调参软件链接:https://pan.baidu.com/s/1npKq_1UnuCfLxSekC8mQng 提取码:bbbb PIDtoolbox_v0.45上面的同一个连接上。 本文对个人学者免费,培训机构可联系我获取商用授权,如需要PDF和Word文档,请加微信bbsgyd。 --------------------------------------------------------------------- 版本与版权说明 鸣谢:感谢手感FPV网店战友提供的部分穿越机图片,感谢各品牌部件商提供部分图片,感谢KZ周老师提供部分资料,感谢许许多多前辈们提供的相关知识点文稿! 版权:本文为广西百色市右江区郭远东编著,作为多旋翼穿越机开源生态配套应用资料,本文并未要求版权控制,你可以复制修改其中的内容,但你需要将它们公布出来,且不得用于商业销售盈利,遵守开源资料使用规定。 特别说明:本文撰写颇费时日,其中内容错误在所难免,如与官方相关资料冲突,请以官方资料为准,如果你觉得本文应当修正其中的某个描述或者内容,请通过邮件告诉作者,邮箱是[email protected],谢谢! 修正第1版发布日期:2022年2月17日星期四 修正第2版发布日期:2022年5月23日星期一 本文最后编辑于2022年5月25日 |
【本文地址】