| 易混 | 您所在的位置:网站首页 › abc坐标变为dq坐标原理 › 易混 |
易混
|
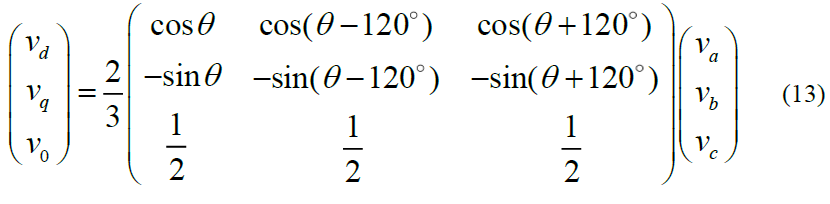
02 — 基本原理 2.1 第一种Park变换矩阵设系统三相电压如式(1)所示。
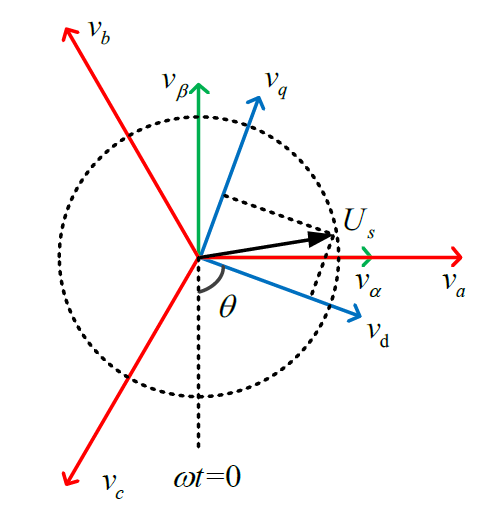
系统三相电压vabc在abc三相静止坐标系与dq同步旋转坐标系中的关系如图1所示。
图1 第一种abc三相静止坐标系与dq同步旋转坐标系的关系 正常情况下,在abc三相电压中,a相相位超前b相120度,且a相相位超前c相240。在图1-1中,abc三相电压给人的感觉就是,a相相位超前c相120度,且a相相位超前b相240度。其实,abc三相的相序并没有改变,产生上述两种不同情况的原因在于,前一种是通过时间矢量图描述abc三相的关系,而图1是通过空间矢量图描述abc三相的关系,SVPWM中会经常用到空间矢量图,而且我觉得这与物理中描述物体简谐运动的旋转矢量法类似。 由图1可知
结合式(1)和式(2)可得
则式(3)至式(5)的关系可得到 Clark变换为:
Clark反变换为: 将dq轴电压向αβ坐标轴投影,可得
则
所以Park变换为:
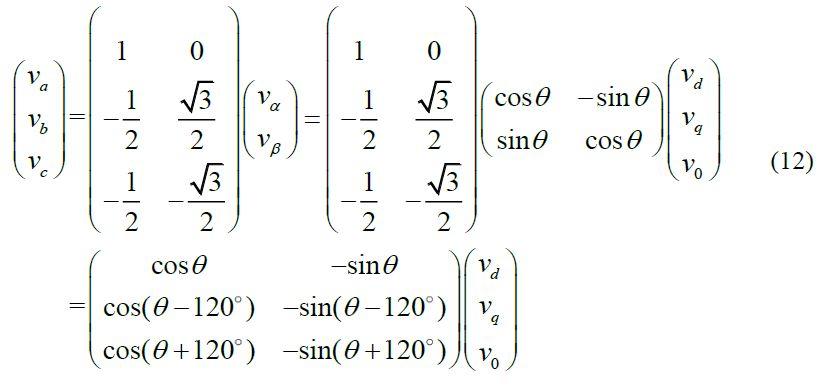
一般为了使Park矩阵可逆,会引入0轴坐标,且
则
式(14)中为d轴与相位参考轴的夹角,一般取为Ua的相角,后续还会区分怎样由PLL获取Ua的相角,以及是否需要偏移PLL输出角度。 2.2 第2种Park变换矩阵
图2 第二种abc三相静止坐标系与dq同步旋转坐标系的关系 由图2可知,由于abc坐标轴与αβ坐标轴的关系和图1中的关系相同,所以以图2为标准的Clark变换与以图1为标准的Clark变换相同,后面相同的Clark变换则不在叙述。 将dq轴电压向αβ坐标轴投影,可得
则
所以Park变换为:
对应Park反变换为:
2.3 第3种Park变换矩阵 图3 第三种abc三相静止坐标系与dq同步旋转坐标系的关系 将dq轴电压向αβ坐标轴投影,可得
所以Park矩阵为 2.4 第4种Park变换矩阵
图4 第四种abc三相静止坐标系与dq同步旋转坐标系的关系 将dq轴电压向αβ坐标轴投影,可得
所以Park矩阵为
Park反变换为:
03 — 总结 本文只对Park和Clark的等幅变换进行了简单阐述,其等功率变换同样对应着4种形式,之后有兴趣的话还会阐述。 其实,本文的关键就在于图1至图4,在知道abc三相静止坐标系与dq同步旋转坐标系的4种关系后,想要推导出4种Park矩阵,并弄懂它们之间的区别与联系也就很容易了。 为了便于读者根据文中内容,通过PSCAD或者Matlab进行仿真验证,现给出文中Park矩阵和各软件中模块的对应关系:文中第1种Park变换对应Matlab中abc/dq0模块的第1种Park矩阵;文中第2种Park变换对应PSCAD中abc/dq0模块的Park矩阵;文中第3种Park变换对应Matlab中abc/dq0模块的第2种Park矩阵;文中第4种Park变换暂未找到对应应用。而且第一种和第二种Park矩阵的q轴分量相反,第三种和第四种Park矩阵的q轴分量相反,其值互为相反数,如果有同学想要推导,可以只推导第一种矩阵,后面三种只需要对第一种进行简单的改写即可得到。 说明:本文来源网络;文中观点仅供分享交流,不代表本公 众 号立场,转载请注明出处,如涉及版权等问题,请您告知,我们将及时处理 - END - |




















 Park反变换为:
Park反变换为:






【本文地址】