| 模拟飞行10 空客A320简体中文教程第四期(起飞 | 您所在的位置:网站首页 › a320驾驶舱灯光按钮是哪一个 › 模拟飞行10 空客A320简体中文教程第四期(起飞 |
模拟飞行10 空客A320简体中文教程第四期(起飞
|
如果一定要中断起飞,首先将推力手柄收回到慢车位,同时打开最大反推力(通过按键盘上的F2键)。现在还没有专门的“中断起飞检查单”。中断起飞后您可以再从滑行状态开始(请参见章节错误!未找到引用源。 5.13 起飞 (第2 部分)
162. 抬轮: a. 起飞滑跑时,您应该稍微压杆直到加速到80 节。摇杆位置可以在PFD 上看到 (参看图45). b. 输入跑道后,如果该跑道有ILS,那么一个水平指引条会出现在PFD上,它可以帮助您在滑跑时对准跑道中线 (参看图 45)。
c. 超过80 节后, 您可以放开杆力。 d. 当达到 VR = 149 节时 (在 PFD速度条上以洋红色三角形显示 ), 副驾驶会宣布 “ ROTATE”之后–您 应该向后拉杆抬起机鼻。如果此时飞行指引仪尚未稳定工作,请抬机鼻到15 度仰角。
e. 起飞后不久摇杆指示和跑道指引条就会消失,而飞行指引仪会开始工作(参见上图)。 xxx. A.FLOOR: 如果您抬头过高,此时失速保护模式会自动启动(在PFD / FMA 区域显示A.FLOOR) ,此时无论推力手柄位置如何,发动机会提供最大推力。当俯仰角回到正常位置后,推力手柄模式会自动设为起飞复飞推力锁定模式( TOGA LK,在FMA 上显示)。该模式是一个锁定模式,只能通过如下方式解除: a. 将推力手柄置于TOGA位 b. 在FCU上解除自动油门 c. 将推力手柄收回CL档位 d. 在FCU上再次启动自动油门 e. 如果此时自动驾驶仪已接通,那必须解除后重新接通 166. 起落架 –自 动刹车 : 在起落架收上 10 秒后,自动刹车会自动解除预位。 167. 减推力高度: 当达到减推力( THR RED)高度时 ( 本次飞行为1,864 英尺) ,FMA(第一栏)会闪烁LVR CLB 168. 字样。此时您需要收回推力手柄到CL档位。由于档位改变会导致推力减少,飞机会有低头动作来补偿推力损失。 加速高度(一般情况下和减推力高度相同): 在此高度上会启动爬升( CLB)模式, FMA 第二栏会有提示。如果没有其他速度限制,飞机会加速到250 节目标速度( 10,000 英尺以下)。在本次飞行中, DF149 航路点有一个220 节速度限制,因此只有在飞过该点后飞机才会加速到250 节。 171. 襟翼收上:如果使用襟翼2,那么在达到F-速度时请将襟翼收到1 档。 173. 爬升/ 高度:在达到第一高度目标12,000 英尺之前请在FCU高度窗输入MCDU 上设置的巡航高度31,000英尺。如果飞机已经在12,000 英尺拉平(高度窗上没有白点显示),那么在输入新高度后您需要再次按下高度旋钮以进入管理模式。 5.14 起飞后
187. 气压修正值: 由于我们选择了良好天气主题,因此法兰克福机场处于静风状态,并且起飞使用跑道7C 和7R。修正海压为1013 百帕,大气温度15 摄氏度。由于这些都是标准数值,因此在本次飞行中您不需要改变仪表上的数值。如果气压值有所改变,副驾驶会自动设定正确的数值。 我们按下图指示执行标准仪表离场航
5.15 爬升
188. 开始爬升检查单: 爬升检查单在以下情况下开始执行: 起飞后检查单执行完毕 自动驾驶仪1 号已开启 襟翼收上 高度 < 过渡高度 飞机处于爬升模式 188. 过渡高度: 在设置MCDU 时我们没有修改过渡高度值( 5,000 英尺-德国和维也纳/ 奥地利标准)。现在达到5,000 英尺后,气压修正值需要设为标准海压( STD)。当气压修正值开始闪烁时,请拉出气压调整旋钮。 191. 到达10,000 英尺: 当到达10,000 英尺时,我们就没有了250 节速度限制。因此飞机会继续加速到根据经济指数算出的291 节速度。
194. 巡航高度: 到达31,000 英尺(在飞过TONSU 点后, ND 上以向上的蓝色箭头表示)后, FMA 上的信息会显示为SPEED,ALT CRZ和NAV。如果设置好了MCDU,此时巡航检查单会自动开始。
197. 小桌板: 副驾驶的小桌板会在到达巡航高度后自动打开。 5.16 巡航
5.17 下降准备
204. 系安全带灯: 您也可以设为AUTO 位 205. 除冰系统 : 您也可以开启除冰系统 –这 时副驾驶会确认系统状态 207. 气压修正值: 由于我们现在在“过渡高度”以上飞行,气压修正值应该已经被设为修正海压,也就是说您不需要做任何改变。 XXX. MCDU – PERF – APPR page:
208. 机场场压QNH: 副驾驶会自动为您设置着陆机场场压。 XXX. 其他数据: 请输入维也纳机场的其他数据,例如温度, 16 号跑道的风向和风速以及当地的过渡高度。 XXX. 进近速度( VAPP) : 这是飞机的最终进近速度,由系统自动计算出并显示在相应位置。 209. 决断高度: 副驾驶会自动输入标准的200 英尺决断高度。而维也纳机场16 号跑道ILS 进近程序也恰好规定了200 英尺的决断高度。 210. 着陆构型: 如果您没有手动修改数值,副驾驶会自动输入襟翼全放( FULL)。
5.18 下降
211. 初始下降: A320有多种下降模式,但本次飞行我们使用: 管理模式: 系统应该已经计算出了正确的下降点( T/D),位于BUDEX和VENEN之间,在ND上以一个向下的蓝色箭头表示。在到达下降点之前,请将高度窗高度目标改为5,000英尺。到达T/D时请按压旋钮已确认高度目标。按下旋钮后飞机会自动按MCDU计算出的飞行路径开始下降。
218. 到达10,000 英尺: 在10,000 英尺以下,我们需要遵守250 节速度限制。飞机会在11,000 英尺自动开始减速到250 节,这大约是在据NERDU点10 海里处。
220. ILS 指示器开启按钮: 按下该按钮(一般是在过10,000 英尺时)后PFD 上会显示“ ILS 水平和垂直下滑信号指引”。ND 顶端会显示ILS进近( ILS APP)字样。 222. 过渡高度: 我们之前在MCDU PERF APPR页面将维也纳机场的决断高度设为5,000 英尺,因此当到达该高度时我们应该将高度表气压修正值改为当地场压。在5,000 英尺时按压“气压”( BARO)按钮。此时副驾驶会自动为您设置气压修正值。 5.19 进近
图 57: PFD:速度“绿点”标志, S, F 以及 Vapp 5.20 最终进近
A320 有两种主要的进近方式:“管理速度模式”或“手动选择速度”。我们的检查单和副驾驶功能使用“管理速度模式”。这意味着MCDU 会自动管理进近速度,而副驾驶会视情放下襟翼。 235. 初始进近阶段: T 最终进近检查单会在如下情况下自动开始:进近检查单执行完毕后;飞行高度低于7,000 英尺绝对高度;飞机已接收到ILS 信号并且航向与航向道夹角小于90 度。这时飞行管理系统进近模式( MCDU-PERF-APPR)会自动由副驾驶激活。开始进近阶段后ND 顶端会显示ILS APP 字样(见图54)。 236. LOC (航向道): A 我们会在WW673 航路点截获航向道。在飞过WW673 航路点后请按压FCU上的LOC按钮。飞机会截获仪表着陆系统的水平指引信号。请确认飞机已经截获航向道。请注意,如果您过早的启动航向道追踪模式(例如在转过WW672 航路点以前),飞机有可能会按错误的方向截获航向道。详情请参考章节6.4。
237. 绿点速度 / 光洁构型速度 : 在进入进近阶段后 (#235) MCDU 会自动减速至 “绿点速度 ” (21节5 ). 238. 襟翼: 在进近阶段(从到达“绿点速度”后),我们要按飞机速度将逐步把襟翼从1 档全部放出。 239. 缝翼速度: A当襟翼放到1档后, MCDU会减速至S-速度( 177节)。如果飞机没有正常减速请使用减速板减速。 240. 放襟翼到2 档(可选): 另一种减速至S-速度的方法就是放襟翼1 档后尽快手动放襟翼到2 档,但请注意不要超过襟翼速度限制。检查单和副驾驶功能也支持这种减速方式。 241. 航向道截获: 首先截获的是航向道信号 (PFD-FMA 上会显示LOC* 或 LOC)
242. 进近: 在截获航向道(参见上图#60)后,下滑道信号很快开始活动(地平仪右侧洋红色菱形)。这时请按压FCU上的APPR按钮。 243. 自动驾驶: 此时请接通第二套自动驾驶仪。这意味着我们正在进行三类盲降(在下降前飞行员都不会手动驾驶飞机),飞机会在两台自动驾驶仪的操作下自动落地。 245. 下滑道截获: 截获下滑道信号后PFD-FMA 应如下图所示 (请参见下图#61):
两条指示带的中点表示飞机的真实位置,而洋红色菱形代表航向道信号和下滑道信号的实际位置。 这意味着在进近过程中菱形指示应该保持在指示带中心位置。上图显示的是处在理想下滑轨迹上的PFD显示。 在EFIS上,请将ND 模式选择旋钮设为LS模式。该模式会在ND 上显示飞机相对下滑道的位置。
254. 设置最终进近速度( Vapp): Vapp (目标速度 ) –是 飞机进近过程中应保持的速度。 FMGC PERF APP页R面中算出的Vapp是Vis+5节再加上1/3 的逆风速度,同时不会超过Vis+20节。并没有对阵风做出修正。 在襟翼全放且起落架放下后,我们应该减速到Vapp,也就是本次飞行FMGC算出的137节。由于我们使用“管理模式”进近,系统会在襟翼全部放下后减速至Vapp。 259. 自动油门: 保持自动油门开启 260. 机翼除冰: 关闭机翼除冰 由于航空公司规定不同或进近条件不同(例如天气,或非ILS进近等),进近的方式可能不尽相同。 5.21 着陆
264. 自动刹车: 设为MED 档 (中量) 265. 外部灯光: 检查是否所有外部灯光都已开启:频闪灯,防撞灯,航行&航徽灯及着陆灯。 266. 复飞高度: 请在FCU高度窗设置复飞后的第一高度目标。现在只设置高度数值,请不要按压或拔出旋钮。在中断进近时,飞机必须沿复飞程序( MCDU F-PLAN 页中蓝色航路点)飞到该高度。如果您使用了副驾驶功能,副驾驶会根据MCDU F-PLAN 中资料自动设置该数值。 267. 着陆提示单: 此时E/WD 上应该显示出着陆提示单。请确认提示单上没有蓝色指示。如果因为之前漏掉一些步骤而出现蓝色提示,那么请按提示设置。 269. 着陆( LAND)和拉平飘(FLARE)模式: 当飞机接近地面时自动驾驶系统首先进入着陆模式,之后进入拉平飘模式。当前的系统模式会在FMA 上显示。 271. 推力手柄: 慢车: 在离地面20 英尺时,您会听到提示音“收油门,收油门”( Retard,Retard )。将推力手柄收回到慢车位以便让飞机柔和接地。 273. 推力手柄: 反推: 接地后应立即开启反推力装置(按键盘F2 键)。 274. 刹车: 自动刹车帮助飞机在地面减速。您可以随时使用刹车开始手动控制减速。任何人工刹车动作都会解除自动刹车系统。 278. 反向推力: 如果使用了反向推力 (#273 和 #276 步),副驾驶将自动复位推力手柄。 281. 自动驾驶: 脱离跑道时,自动驾驶仪会自动解除并响起警告提示音。按主警告灯按钮可以关闭警告。 5.22 复飞
推力手柄: 起飞复飞推力: 如果出现紧急情况必须复飞,例如跑道上有飞机或飞机自身出现问题,请首先将 推力手柄推到起飞复飞( TOGA)推力档位,并按此程序执行。 5.23 着陆后
285. 外部灯光: 设置“鼻轮”灯为滑行。 287. 加速( EXPED) : 如果在下降时使用该功能才进行设置。 293. APU 启动按钮: APU主开关开启10 秒钟后可用。 AES: 打开 AES窗口 (CTRL+SHIFT+W) 并选择 “ F2– Increment Position 选项,”直 到您看到 F17 号停机位,选择“ F3– Request Follow-Me to selected Position 。跟着指引车”滑行。当您到达停机坪时您会听到 “ Blocks inposition 提”示 ,这意味着您已到达正确的位置。 5.24 停机
301. 轮挡/ 停机刹车: 为了在降落后给刹车降温,在轮挡设置好后您可以关闭停机刹车。此时飞机由轮挡固定。 308. 外部电源: 根据机场情况,您可以选择直接接通机场外部电源或选择由地面动力单元( GPU)供给的电力。在维也纳机场我们直接使用外部电源( EXTERNAL POWER)。 310. APU: 在接通外部电源后您可以关闭APU AES: 打开AES窗口 (CTRL+SHIFT+W) 并选择您需要的选项。“停机检查单”完成5 分钟后,飞机的所有系统(包括MCDU)都会被重置。此时您便可以开始执行“驾驶舱准备检查单”,并准备下一次飞行了。 5.25 离机
313. 外部灯光: 关闭所有外部灯光。 XXX. 驾驶舱, 冷舱“:现在驾驶舱应该已经回到了冷舱状态。所有系统和开关应该都已经“关闭”。在 关闭电瓶前驾驶舱应该如下图所示:
到这里,本套教程已经全部结束,希望对想飞空客A320的飞友有所帮助,更多的飞行教程我会在往后的时间里面慢慢来更新,敬请期待!返回搜狐,查看更多 |


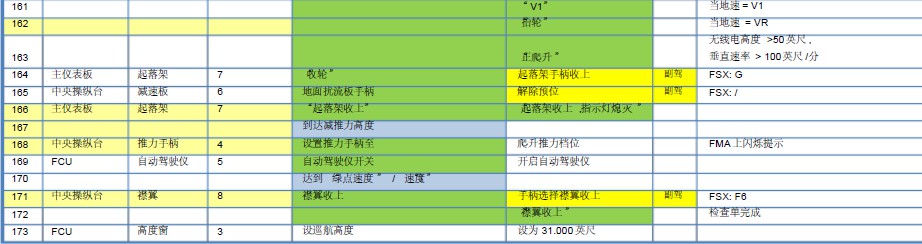
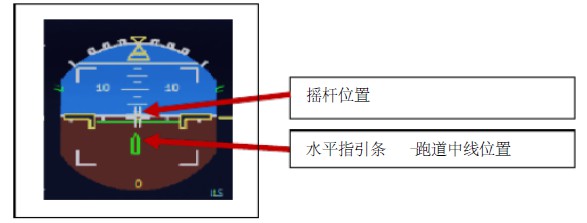 图 45: 摇杆位置: 跑道上
图 45: 摇杆位置: 跑道上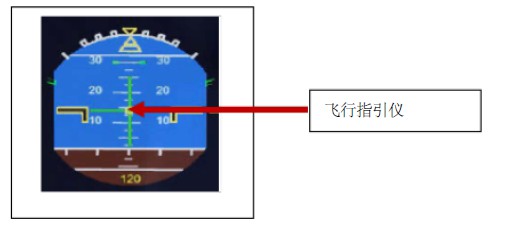 图 46: 飞行指引仪: 起飞中
图 46: 飞行指引仪: 起飞中
 图 47: EDDF - 07C跑道–SULU8D标准仪表离场程序
图 47: EDDF - 07C跑道–SULU8D标准仪表离场程序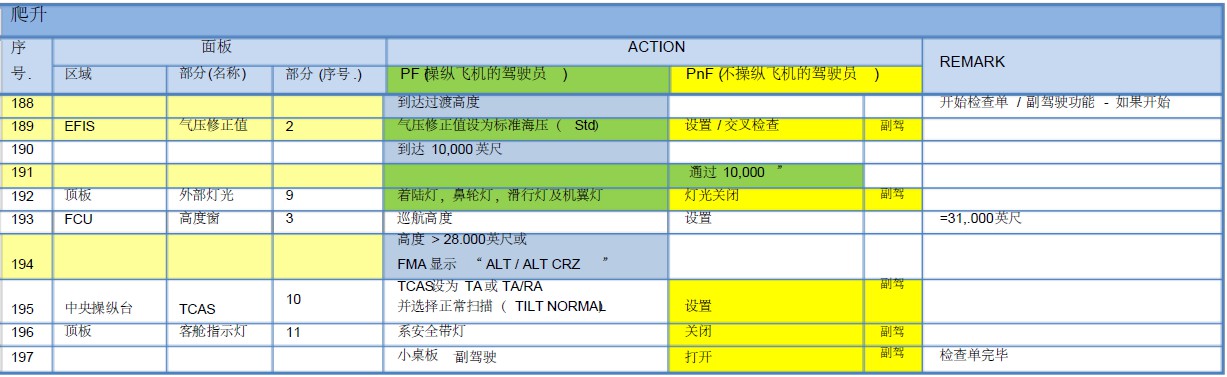
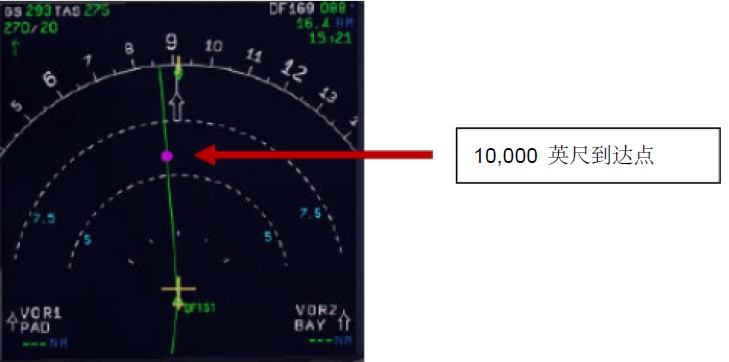 图 48: 10.000 英尺
图 48: 10.000 英尺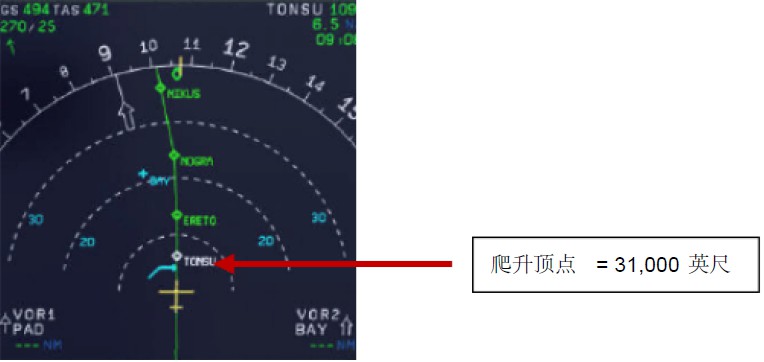 图 49: T/C 爬–升 顶点 = 31.000 英尺
图 49: T/C 爬–升 顶点 = 31.000 英尺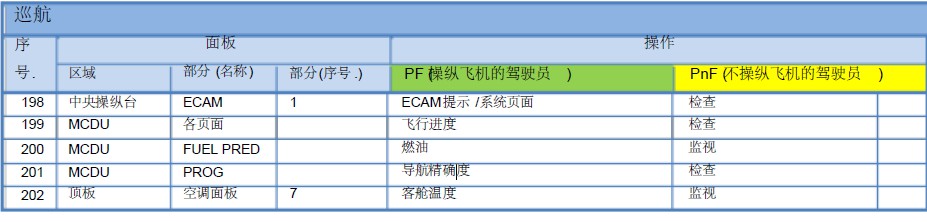

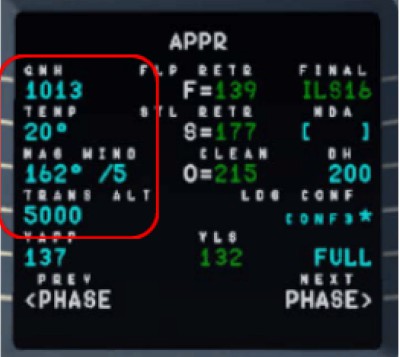 图 50: MCDU –性 能页面 –进 近页面
图 50: MCDU –性 能页面 –进 近页面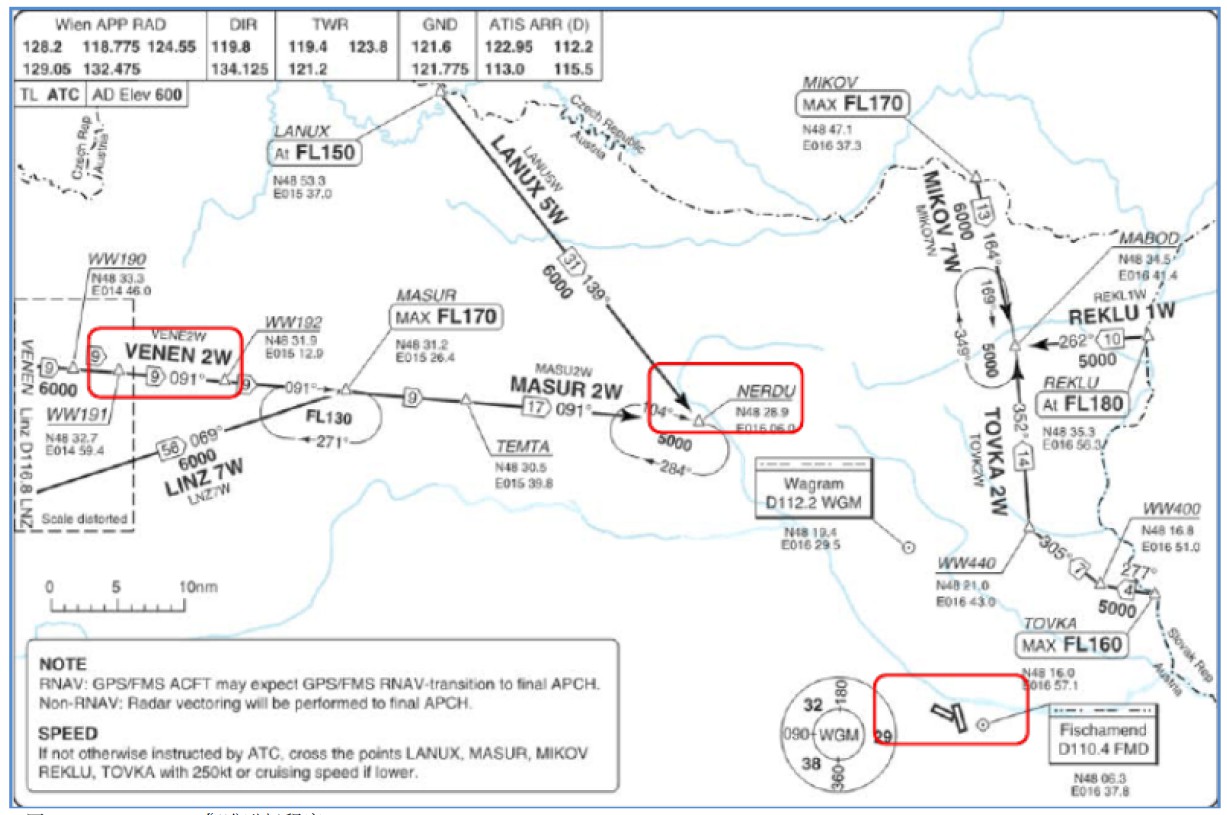 图 51: ,VENEN 2W“标准进场程序
图 51: ,VENEN 2W“标准进场程序
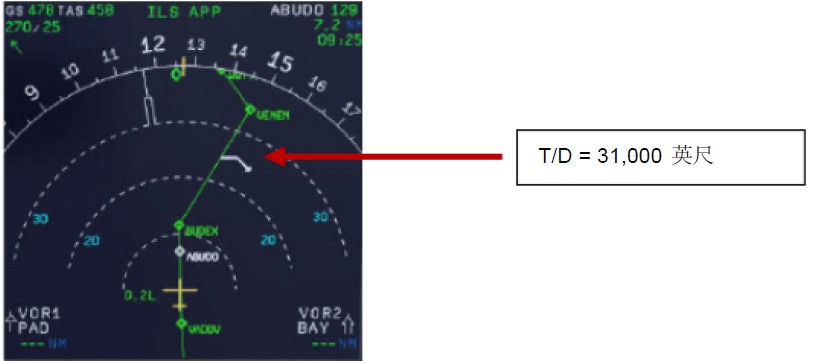 图 52: 下降点– 初始下降
图 52: 下降点– 初始下降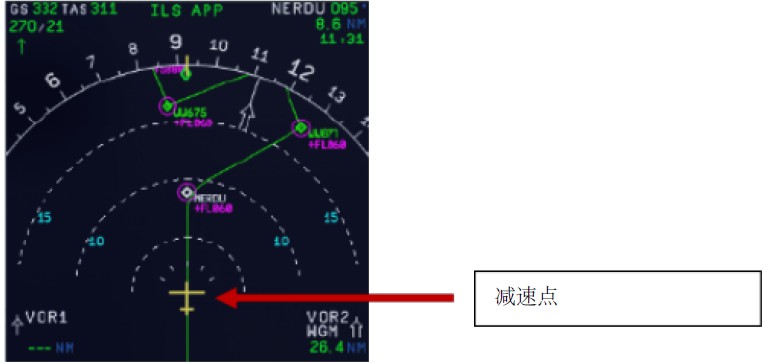 图 53: ND: 减速点
图 53: ND: 减速点
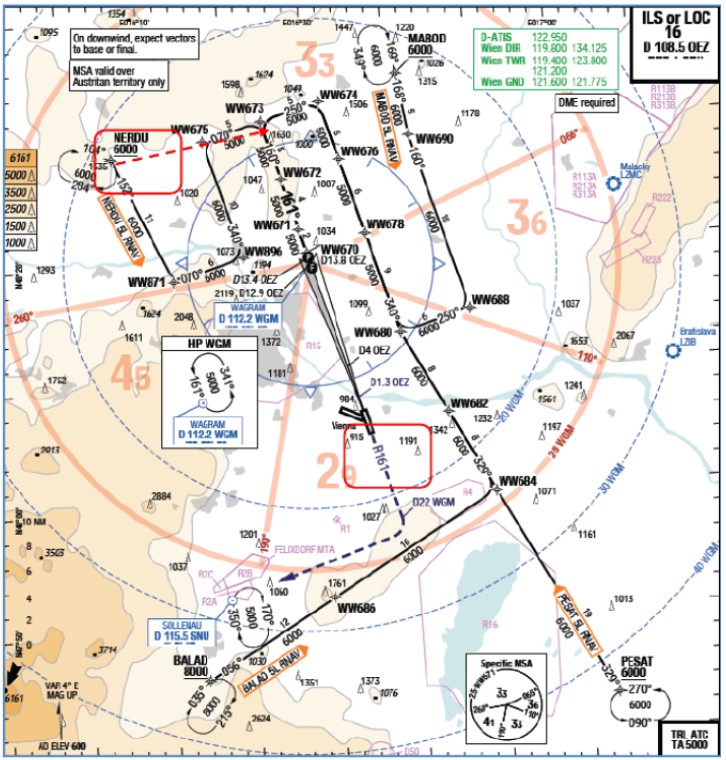 图 54: NER4L过渡程序图
图 54: NER4L过渡程序图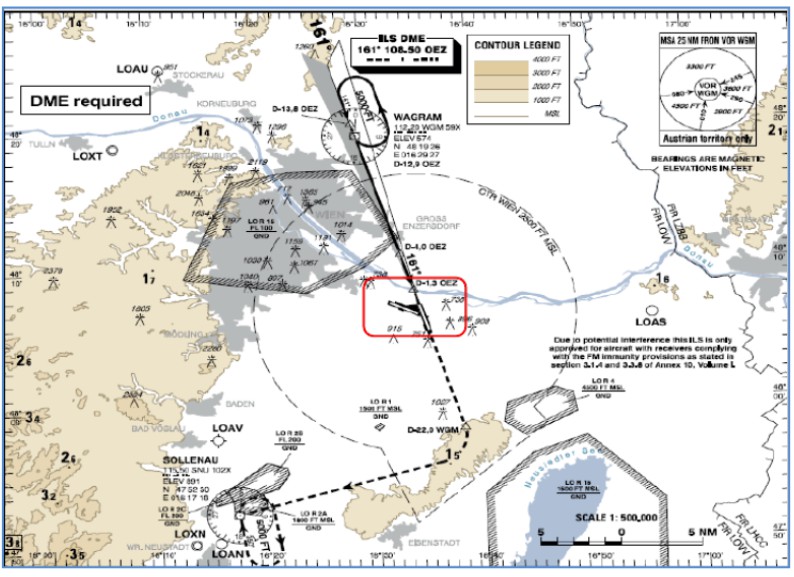 图 55: 维也纳16 跑道ILS进近图
图 55: 维也纳16 跑道ILS进近图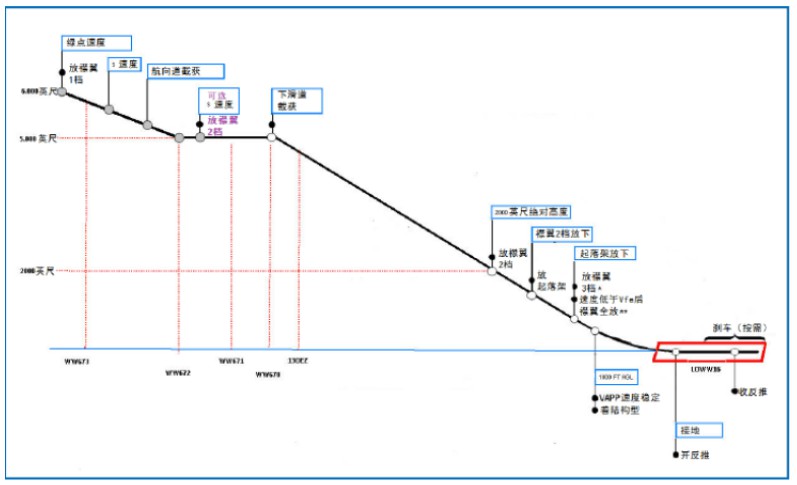 图 56: 维也纳LOWW 16 号跑道ILS最终进近操作简图
图 56: 维也纳LOWW 16 号跑道ILS最终进近操作简图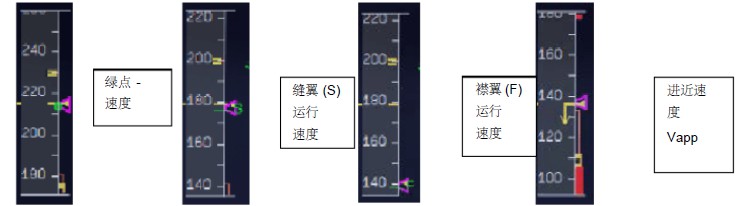
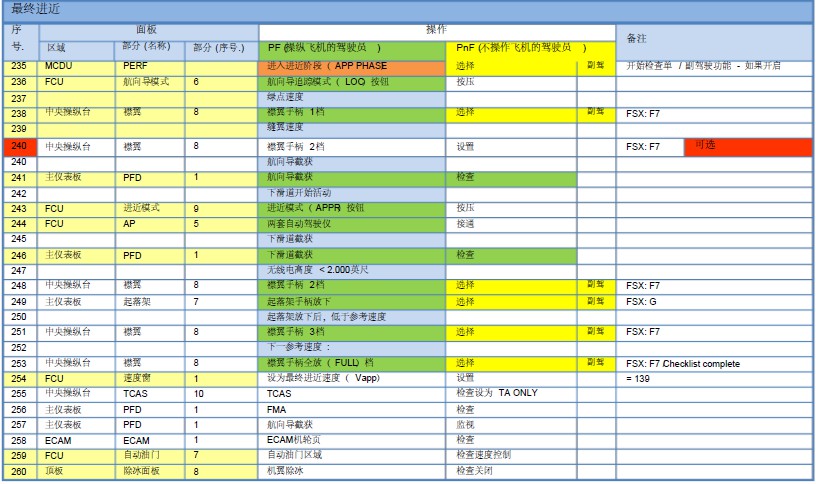
 图 58: WW673 接受LOC信号
图 58: WW673 接受LOC信号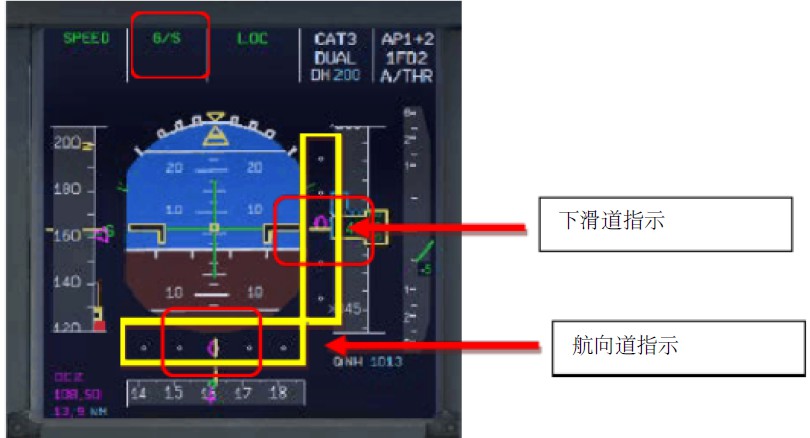 图 60: PFD –下 滑道截获 –水 平及垂直下滑路径
图 60: PFD –下 滑道截获 –水 平及垂直下滑路径 图 61: ND –LOWW 16跑道ILS模式
图 61: ND –LOWW 16跑道ILS模式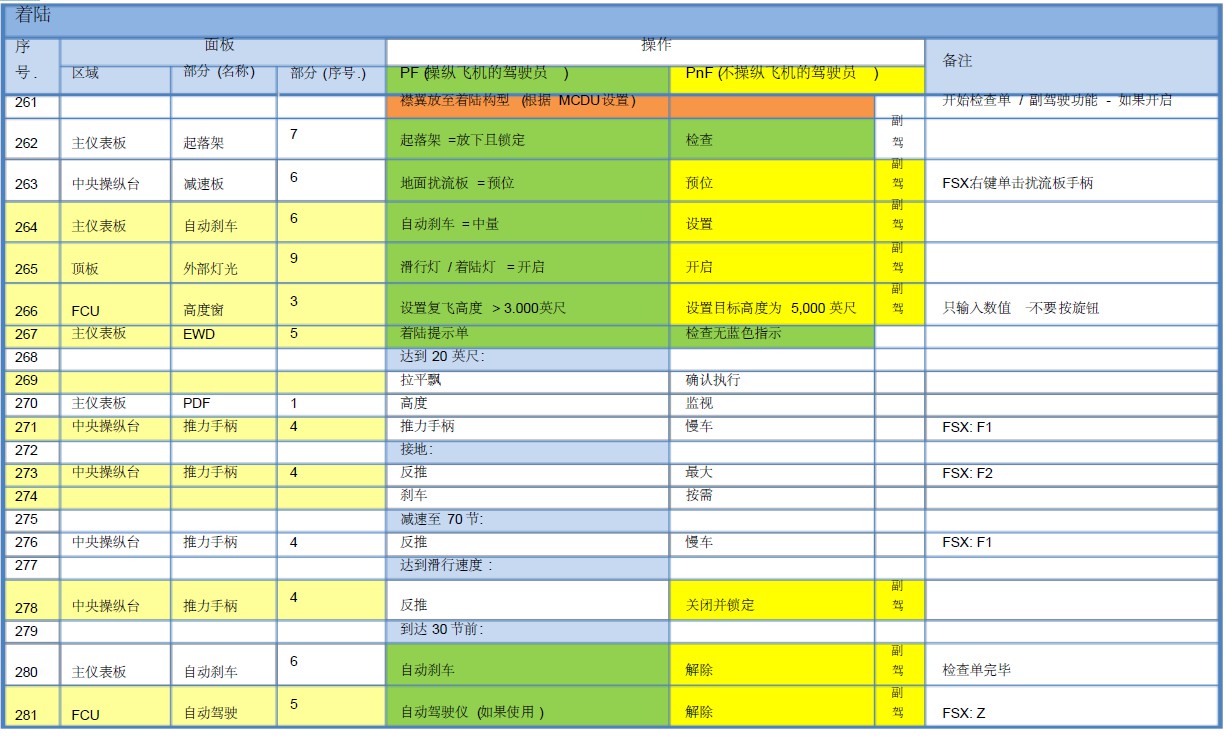




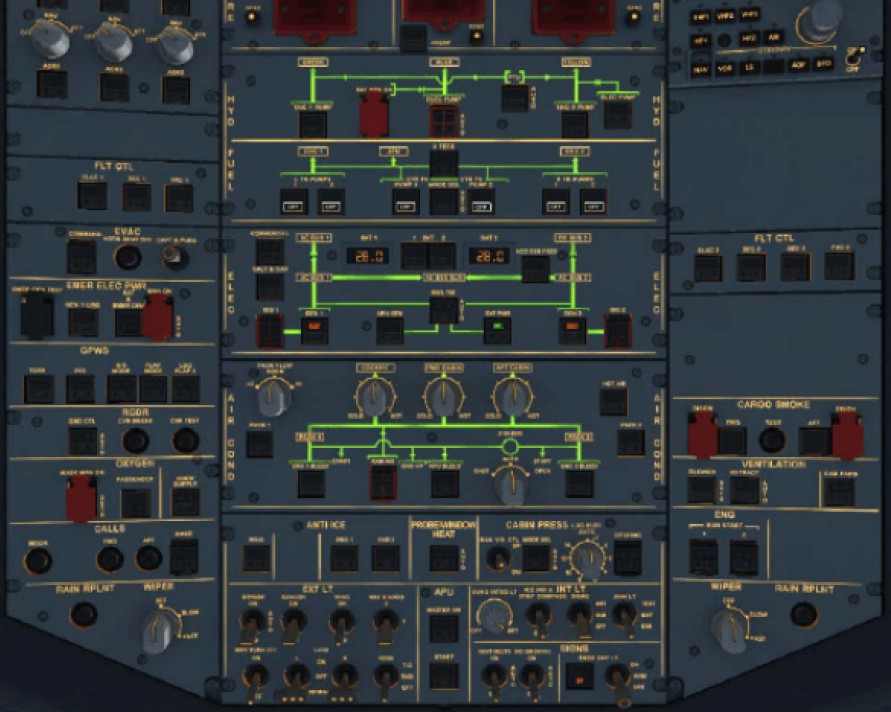 图 62: 关闭电瓶前的顶板
图 62: 关闭电瓶前的顶板【本文地址】