| 小猫爪:S32K3学习笔记11 | 您所在的位置:网站首页 › BLS故障无效或错误信号 › 小猫爪:S32K3学习笔记11 |
小猫爪:S32K3学习笔记11
|
小猫爪:S32K3学习笔记11-S32K3之FCCU
1 前言2 FCCU的功能框图2.1 错误输入2.2 时钟输入2.3 FSM2.4 FOSU
3 FCCU的状态机4 MCAL配置5 SPD应用代码示例END
1 前言
这一节来学习一下safety中的一个核心模块,它就是FCCU(Fault Collection and Control Unit),看名字就知道这是一个错误收集模块,其他模块发生错误了,就会讲错误信号传递到FCCU中进行统一管理。 2 FCCU的功能框图 这FCCU的功能框图如下: 这DCM可以理解成是K3里面的一个错误集合器,主要体现在6个寄存器中,分别是标志寄存器DCMROD3,DCMROD4和DCMROD5;以及相对应的使能寄存器DCMRWD3,DCMRWD4和DCMRWD5。每一个bit代表着一个DCM错误通道,所以理论上总共有3*32=96个DCM通道(实际上并没有96个,因为有几个通道是reserve状态,S32K3总共有86个错误),只有当标志寄存器位和其对应的使能寄存器位都等于1时,这个错误才能传送到FCCU中去被处理。 这里可以提一下的就是ERM 20个通道所能报告的错误是DCM的一个子集,但是ERM通道和DCM通道并不是一一对应,这里很好理解,因为两者对错误的分类方式不同。ERM针对的是Memory ECC的错误,而DCM则涵盖了K3整个所有的错误。 DCM的96个通道传送到FCCU后,FCCU又把DCM的错误按照错误类型又将其划分成8种通道组,分别对应NCF[7:0]这8个通道组,如下表所示: FCCU的时钟源有三个,分别是Primary Clock,Safety Clock0和Safety Clock1,其中Primary Clock为FCCU的主时钟,其来源为AIPS_PLAT_CLK,而Safety Clock是给FCCU中的一些特殊模块使用的,至于到底给了谁,我也不是特别清楚,据我所知,会给EOUT和FOSU提供时钟(嘿嘿嘿,因为RM手册里面有个表格有标),其来源为FIRC_CLK。 FSM是FCCU的主体,它负责整个FCCU状态机的切换,其实就是接收错误信号,然后根据相关配置来决定触发几个特殊的信号给外部。首先它能触发三个中断,分别是timeout interrupt, alarm interrupt和NMI interrupt,还可以触发一个function reset信号给MC_RGM来让K3执行功能性复位(这里需要注意一点,Function Reset并不能复位FCCU模块),还可以触发两个外部信号EOUT[1:0]给外部SBC,让SBC执行一些操作,另外EOUT[1:0]的点平信号是互补相反的。 2.4 FOSU这个模块是用来监控FCCU的,是为了防止FCCU失效的。如果一个错误信号传送到了FCCU,而FCCU在短时间内并没有做出相应的反应,那么FOSU就认为FCCU挂了,那么它会触发一个Destructive Reset给MC_RGM来让K3执行破坏性复位(这里需要注意一点,Destructive Reset会复位FCCU模块)。 3 FCCU的状态机 当一个错误传到了FCCU中,FCCU的处理分为几个阶段,即其状态机,每个阶段干不同的事情,FCCU的状态机切换如下图所示: 另外进入FAULT也可以选择是否输出EOUT信号给SBC,SBC接收到信号可以进行一些操作。 4 MCAL配置 我们可以在MCAL中的eMcem中配置FCCU模块,如下可配置一些基本参数: 这里还有非常重要的一步,就是需要在Platfrom中使能FCCU的中断以及注册其对应的服务函数,其中两个中断服务函数函数名必须是FCCU_ALARM_ISR对应FCCU_0_IRQn和FCCU_TIMEOUT_ISR对应FCCU_1_IRQn,如下: 又到了紧张刺激的示例代码环节,在上节EIM和ERM中,就已经稍微提过了,具体流程就是使用EIM注入错误,然后FCCU收集错误并处理,然后ERM作为错误信息收集模块。 首先使用EIM在在通道0,也就是SRAM1中注入ECC错误,如下: void SRAM_EIM_FaultInjection(void) { printf("Inject fault %d.\r\n", (unsigned int)(nInjectFault)); printf("Inject RAM0 ECC error.\r\n"); eMcem_SetupInjectionChannel(EMCEM_EIM_CH_0, 0, 1); eMcem_InjectFault( EMCEM_EIM_CH_0 ); Cache_Ip_InvalidateByAddr(CACHE_IP_DATA, 0x20420000, 32); ErrorTriggle = *(uint32_t *)(0x20420000); }注入后,CPU再次访问SRAM1时候,就会触发ECC错误,这个时候就会报告到FCCU中去从而触发FCCU的alarm中断,这里需要注意的是这个ECC错误同时也会触发ARM核的BusFaultHandle,所以需要在BusFaultHandle里面需要加点小的处理: void BusFault_Handler(void) { //.......... //.......... /* if FCCU Alarm interrupt is active, leave bus fault handler and let FCCU Alarm ISR to handle the fault */ if(IP_FCCU->IRQ_STAT & FCCU_IRQ_STAT_ALRM_STAT_MASK) { return; } //.......... }判断一下是否有FCCU的alarm中断产生,如果有的话,那就直接return,让FCCU的alarm中断服务函数去处理,如下: eMcem_ErrRecoveryType eMcemUserAlarmHandler( eMcem_FaultType nFaultId ) { uint32_t u32FccuFaults = 0; uint32_t u32FaultAddr = 0; /* read fault information */ eMcem_GetErrors( &faultContainer ); eMcem_Fccu_GetErrors( &u32FccuFaults, &u32FccuFaults ); /* Must clear faults in time (within 10ms after fault detected), otherwise FCCU enters fault state and reset occurred. */ eMcem_ClearFaults( nFaultId ); /* print message showing execution of FCCU Alarm Handler. */ printf("FCCU alarm handler. FCCU_NCF=0x%X, Fault_ID=%d.\r\n", (unsigned int)u32FccuFaults, (unsigned int)nFaultId); printf("faultContainer = 0x%08X, 0x%08X, 0x%08X. \r\n", (unsigned int)faultContainer.au32Faults[0], (unsigned int)faultContainer.au32Faults[1], (unsigned int)faultContainer.au32Faults[2]); //........... //........... /* if it's NCF2 fault - RAM ECC error */ if(u32FccuFaults & FCCU_NCF_S_NCFS2_MASK) { eMcem_GetMemErrInfo( EMCEM_ERM_SRAM0, &memErrInfo ); eMcem_ClearFaults( nFaultId ); u32FaultAddr = memErrInfo.Err_AddrRaw; u32FccuFaults &= (~FCCU_NCF_S_NCFS2_MASK); /* A reserved area without RAM ECC init can be placed at the following address for test purpose */ if((u32FaultAddr>=0x20427FF0) && (u32FaultAddr if(u32FccuFaults == 0) { while(1); Mcu_PerformReset(); } } } //........... //........... }好了,我只能稍微写一点来示范一下EIM,ERM,FCCU三者的联动,重点在于帮助大家理解K3的错误处理机制(嘿嘿嘿,我是不会说,这个例子是我抄袭的)。 在这里还需要注意一下,在调试状态下,可能会出现eMcem_Init初始化失败,查看DCM状态寄存器后发现了分别在RCCU1,RCCU2和ITCM处发生了错误,至于原因吗,可能是因为在调试状态下,有些访问顺序不符合K3功能安全检测条件的要求,具体我也不清楚,所以一开始需要修改两个地方: 第一点就是在startup.s的启动代码处加上三句话,如下图: 第二点就是在MCAL配置中,将整个NCF0通道错误关闭,如下: 第二点就是在MCAL配置中,将整个NCF0通道错误关闭,如下: 
FCCU是整个K3功能安全的核心,后面有很多的错误处理机制都是由FCCU来完成的,所以FCCU至关重要。 END |

 这8组通道几乎涵盖了S32K3所有的错误,这8种错误后续会一个一个介绍。除了8个NCF通道组外,FCCU还能通过EIN[1:0]接收来自芯片外部的错误信号,并做一些处理。
这8组通道几乎涵盖了S32K3所有的错误,这8种错误后续会一个一个介绍。除了8个NCF通道组外,FCCU还能通过EIN[1:0]接收来自芯片外部的错误信号,并做一些处理。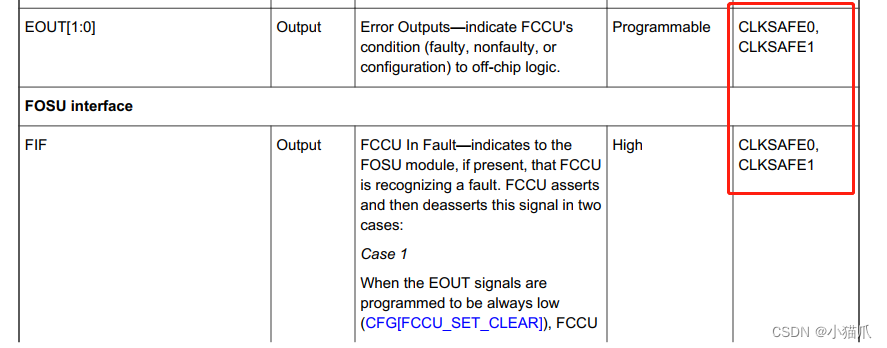
 从图中可以看出,FCCU包含四种状态,分别是CONFIG, NORMAL, ALARM,FAULT,这几种状态的切换也是非常的简单。
从图中可以看出,FCCU包含四种状态,分别是CONFIG, NORMAL, ALARM,FAULT,这几种状态的切换也是非常的简单。 在下面这个界面中可对8个NCF通道作配置,主要有是否产生ALARM中断,是否产生NMI中断,是否产生Function Reset等等,大家自行体会,不再多言。
在下面这个界面中可对8个NCF通道作配置,主要有是否产生ALARM中断,是否产生NMI中断,是否产生Function Reset等等,大家自行体会,不再多言。  然后在每个NCF通道里面,可以看到每个NCF对应得DCM通道,比如NCF0:
然后在每个NCF通道里面,可以看到每个NCF对应得DCM通道,比如NCF0:  然后就可以对每个通道进行配置,如是否失/使能这个DCM错误,还有配置这个错误的alarm中断服务回调函数。这里为了方便,我把所有的错误的alarm中断服务回调函数都配置成为eMcemUserAlarmHandler,到时候再在函数里面细分。
然后就可以对每个通道进行配置,如是否失/使能这个DCM错误,还有配置这个错误的alarm中断服务回调函数。这里为了方便,我把所有的错误的alarm中断服务回调函数都配置成为eMcemUserAlarmHandler,到时候再在函数里面细分。

【本文地址】