| Releases · iNavFlight/inav · GitHub | 您所在的位置:网站首页 › ATOMRC官网 › Releases · iNavFlight/inav · GitHub |
Releases · iNavFlight/inav · GitHub
|
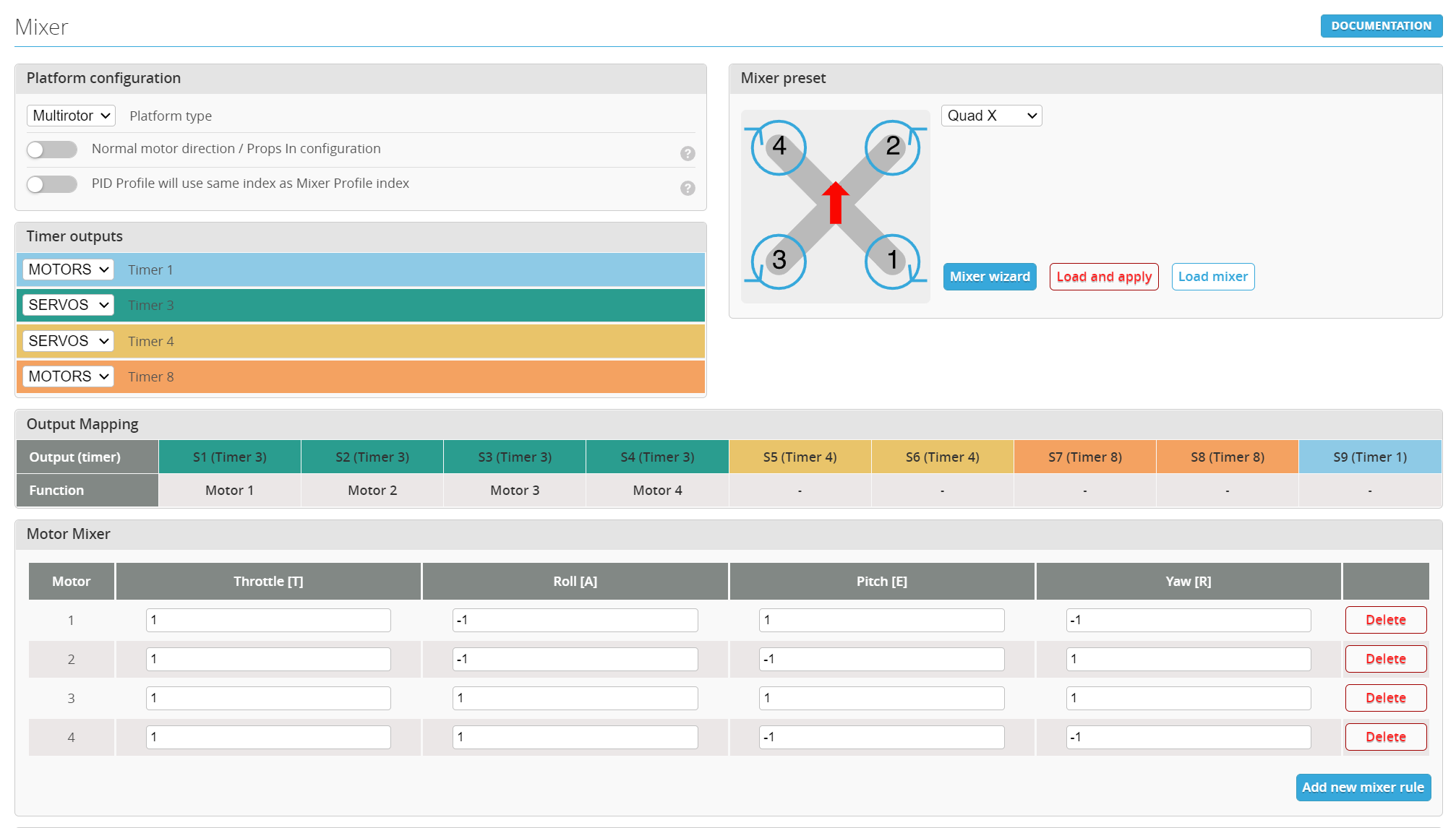
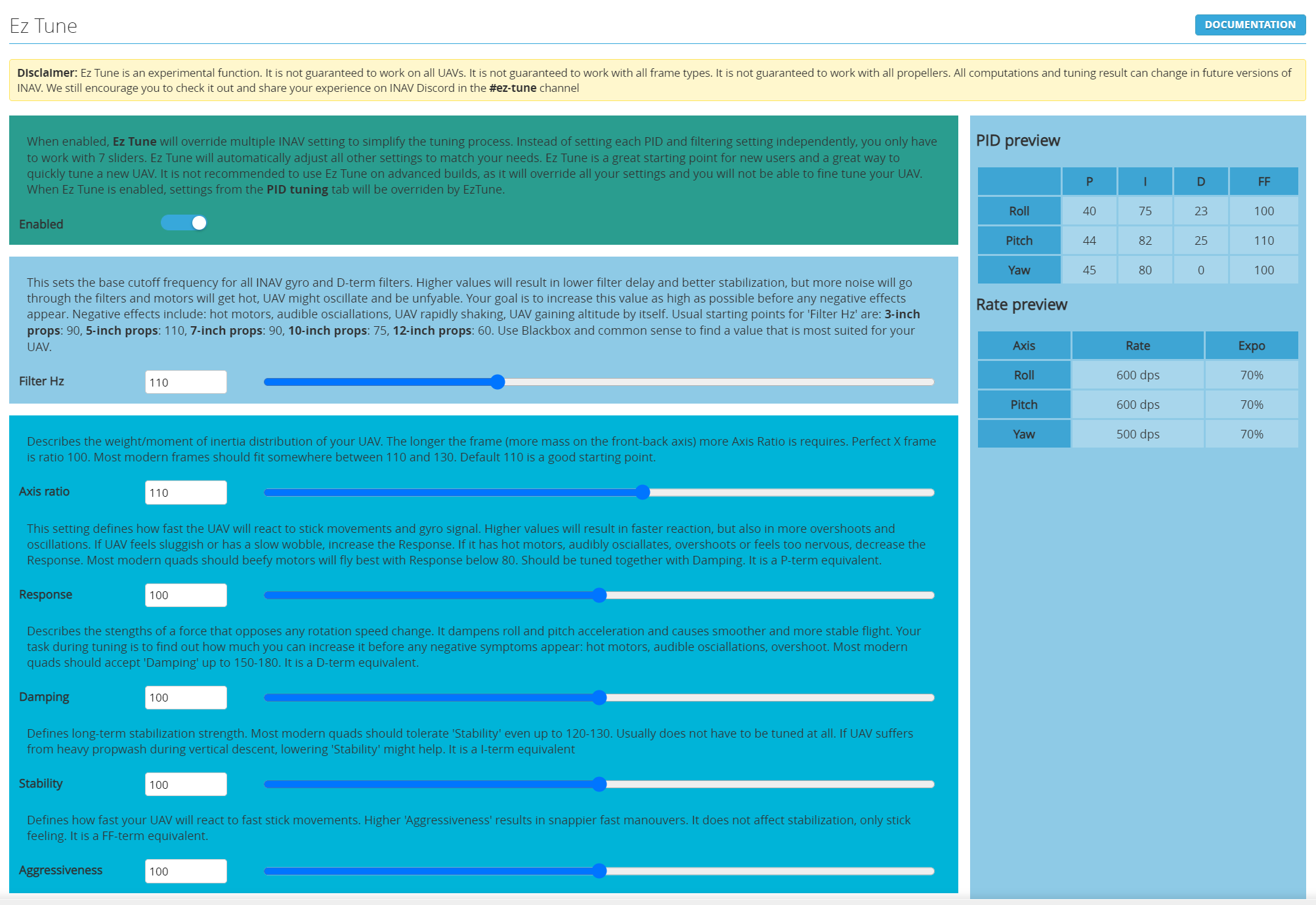
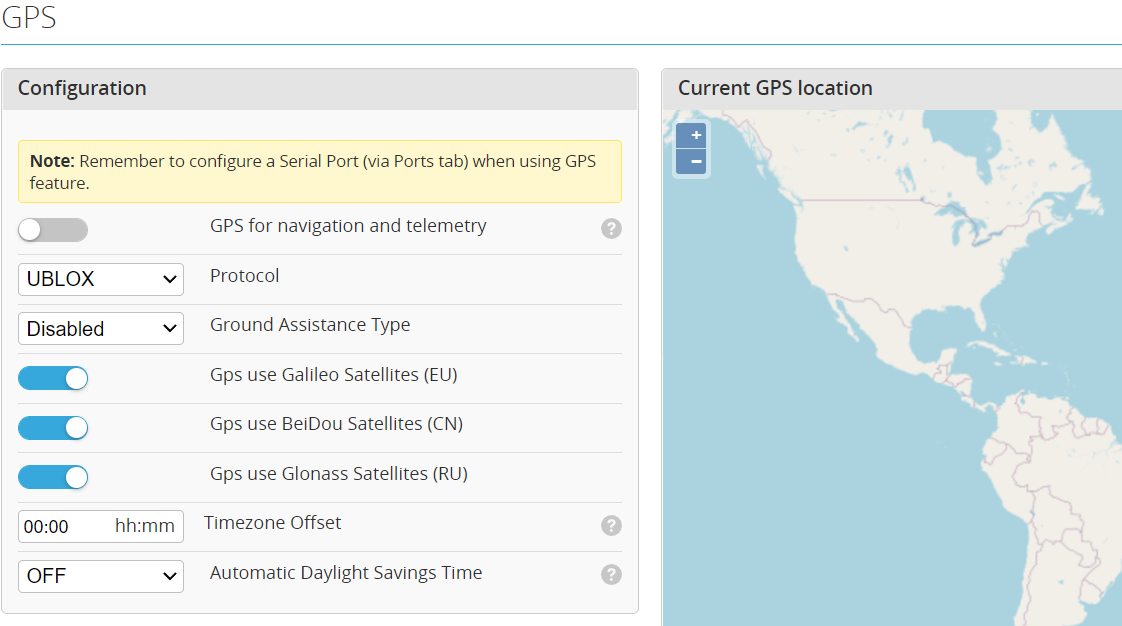
Please carefully read all of this document for the best possible experience and safety. Contact other pilots, share experiences, suggestions and ask for help on: INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards. The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays The FrSky D-series telemetry support has been removed. This applies to legacy D4R receivers and some 3rd party whoop boards Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default. Upgrading from a previous release Upgrading from INAV 6 and 6.1 Download and install the new INAV Configurator 7 Save to a file the current diff all from the CLI. Upgrade to INAV 7 using the Full Erase option in the configurator. In case of Analog FPV, upload your OSD font of choice from the OSD tab. Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER. There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration. You should be ready, explore new 7.0 features, and enjoy! Upgrading from older versionsPlease follow the instructions on this page. Major changes Flexible motor and servo output allocationINAV now was a function that allows to flexibly assign functions to PWM outputs directly from INAV Configurator. Specific function AUTO, MOTORS or SERVOS can be assigned to each Timer Group. Then, all outputs from this group will perform this function. Thanks to this, it's possible to use servos and motors in ways that previously required building a custom targets. Bear in mind: In some rare cases, output assignment might be different than in INAV 6. This makes it even more important to remove your props and double check your outputs before you power your flight controller with batteries for the first time after applying your old settings or enabling outputs. It is not possible to assign function to individual outputs. It's a hardware, not software limitation. Mixer profiles and VTOL supportThis has been a frequent request since PNP VTOL models started becoming more common. Read more in Mixer Profile INAV docs and VTOL INAV docs Ez TuneThe Ez Tune is a simplified tuning framework similar to Betalight's Simplified Slider Tuning. Instead of setting each PID controller gain, rate, and filter setting separately, Pilot is presented with 8 sliders for: Axis ratio Main filter frequency Response Damping Stability Aggressiveness Rate ExpoEz Tune settings are not compatible with Betaflight Slider Tuning setting and cannot be migrated directly. Read the description in Configurator's Ez Tune tab on what each setting does and how it should be used. More on the topic of Ez Tune can be found here In-flight Emergency RearmWith INAV 7.0 came the ability to Emergency Rearm. This allows you to rearm in flight when you accidentally disarm. You need to do this within 5 seconds of disarming. Which sounds short, but is actually a pretty long time. Emergency Rearm can be used after a launch and while the aircraft still believes it's flying. It bypasses safety checks (including the throttle position) and doesn't trigger auto launch. Multirotors will also briefly switch to Angle to stabilise and level the flight. You can read all about it at https://github.com/iNavFlight/inav/pull/9254 Timer DMA BurstINAV 7 adds the DMA Burst mode to selected target as ultimately fixes the problem of DSHOT protocol not working on some boards. Pilots do not have to take any actions, DSHOT is just available on previously affected flight controllers. This applies to: Matek F405 TE SpeedyBee F405 V3 JETI EXBUS fixedThe JETI EXBUS protocol should now not hang the flight controller during operation. The issue was originally fixed in betaflight/betaflight#13130 . Thank you @SteveCEvans and @klutvott123 Multirotor Cruise ModeThe Cruise Mode for Multirotors allows pilots to let go the radio sticks while UAV flies on a predefined course with predefined speed. Just like with regular PosHold, Throttle stick sets the altitude and course, while the pitch stick is used to set the horizontal speed. When released INAV will hold set speed, altitude, and course. More information available in here https://youtu.be/4pgDxexuSnU NMEA Protocol no longer availableAs mentioned in the Important Notes section, INAV 7 no longer supports the GPS NMEA protocol. All modern GPS module support one of the UBLOX protocols and as a result pilots must switch to either UBLOX or UBLOX7 protocol. GPS ImprovementsA number of improvements have been made to GPS support in INAV 7. It is now possible to select multiple GPS constellations, and not only Galileo. If your GPS modules does not support a particular combination, it will fallback to no extra constellations. M10 GPS units will now default to 10Hz, like M8 units and a new cli setting has been added to allow overriding the update rate of your UBLOX7 GPS (gps_ublox_nav_hz). This should allow you to fall back to 5Hz or bump it up to the limits of what is supported by your GPS module. INAV now support MSP VTX when using MSP DisplayPort OSD. Now it is possible to change VTX power levels and channels via INAV's OSD menu or ELRS backpack without connecting the SmartAudio wire on HD-Zero VTXs. If you MSP DisplayPort OSD is working, no extra configuration is needed. Linear Descent RTH mode changedAT_LEAST_LINEAR_DESCENT is no longer a method for RTH. It has been replaced with a more flexible linear descent option that will work with any RTH method. If previously using AT_LEAST_LINEAR_DESCENT, you should now just use AT_LEAST as the RTH type. Linear Descent is now a separate option that can be used with any other RTH method. To make this possible, the target altitude of the descent is now the nav_rth_home_altitude. In some cases, if flying below the home position, this will work as a linear ascent. You can also decide when the linear descent will start. Set the nav_rth_linear_descent_start_distance parameter to the distance (metres) from the home point, where you want to start descending. Set to 0, the default setting; the descent will start immediately, as with the pre-7.0 implementation. These options are available in Configurator. See the Navigation Mode: Return to Home wiki for more details. Pilot LogosYou can now have custom pilot logos on your OSD and arming screen (HD Only). You will need to create a custom font with your logos to show them on screen. The OSD logo is a 3x1 character symbol. This can be used with both analogue and HD. The arming screen logo is a 10x4 character image, and only works with HD systems. More details are available in the OSD Document. Other changes The AUTOLEVEL mode is renamed to AUTO LEVEL TRIM. The functionality remains the same. The osd_mah_used_precision parameter has been renamed osd_mah_precision. 24 channels available for Jeti systems (not available with F411 or F722 flight controllers). Virtual pitot is enabled by default. Other removed functions FrSky D-series telemetry output_mode setting that allows to reassign all PWM outputs to either MOTORS or SERVOS New targets SDmodel H7V1 Matek H743HD SpeedyBee F405 V4 SpeedeBee F405 Mini SpeedyBee F7 Mini V2 GEPRCF405 GEPRCF722 NEUTRONRC F435 Mini AIO DAKEFPV F405 DAKEFPV F722 AtomRC F405 NAVI Delux JHEMCUF722 JHEMCUF405 CLI Changed settings Name Description gps_provider Removed: NMEA gps_sbas_mode New: SPAN nav_rth_alt_mode Removed: AT_LEAST_LINEAR_DESCENT pito... |
【本文地址】