基于STM32F103C8T6 HAL库 配置的L298N电机驱动模块进行小车调速控制(可通过串口发送指令控制) |
您所在的位置:网站首页 › 驱动l298n › 基于STM32F103C8T6 HAL库 配置的L298N电机驱动模块进行小车调速控制(可通过串口发送指令控制) |
基于STM32F103C8T6 HAL库 配置的L298N电机驱动模块进行小车调速控制(可通过串口发送指令控制)
|
基于STM32F103C8T6 HAL库 配置的L298N电机驱动模块进行小车调速控制 目录 CubeMX配置生成的Keil工程 CubeMX配置总的结果如下
打开八个TIM口,有部分会因为重映射和其他原因无法同时启动,在一番取舍之后选择了以下几个引脚,仅供参考 SYS RCC 由于使用到串口配置,需要对printf进行重定向(对串口printf进行重定向) 定义麦轮小车运动的函数 (这里写的的确比较繁琐,但是看着还算简单易懂,暂时没做修改,后期可能进行精简) 这里只写出占空比=50%的情况,可根据自主需求进行修改 /* USER CODE BEGIN PV */ uint8_t velocity = 50; /* USER CODE END PV */这里的注释在工程资源中会写明(当然,与接线有关,如果你会自己一个一个测出来前轮后轮的正转倒转,我的注释是没有参考价值的),也就是说,可以任意接线,只要写出程序后对实体进行调试测出相应的运动方式即可。 __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2,0); 意思是该通道的占空比为零 /* USER CODE BEGIN 0 */ void Reset() { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_3,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_1,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_4,0); __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3,0); } void forward() { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_3,velocity); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_1,velocity); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3,velocity); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_4,0); __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3,velocity); } void backward() { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2,velocity); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_3,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_2,velocity); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_1,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2,velocity); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_4,velocity); __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3,0); } void shift_left() { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_3,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_2,velocity); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_1,velocity); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3,velocity); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_4,velocity); __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3,0); } void shift_right() { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2,velocity); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_3,velocity); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_1,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2,velocity); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_4,0); __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3,velocity); } void turn_left() { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_3,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_2,velocity); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_1,velocity); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2,velocity); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_4,0); __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3,velocity); } void turn_right() { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2,velocity); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_3,velocity); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_1,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2,0); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3,velocity); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_4,velocity); __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3,0); }main.c 要在main中开启pwm,才可以正常使用 /* USER CODE BEGIN 2 */ HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2); HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_1); HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_2); HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3); HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2); HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_3); HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_4); HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_3); /* USER CODE END 2 */下面讲关于单片机从串口收到指令进行运动的部分 /* USER CODE BEGIN 0 */ 。。。上面的前进后退函数 uint8_t flag[1];//由于我们只使用单个字符作为指令,接收的包不用太大会根据从串口收到的数字控制小车进行相应的运动 while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ HAL_UART_Receive_DMA(&huart1, (uint8_t *)&flag, 1); switch(flag[0]) { case '0': Reset(); break; case '1': forward(); break; case '2': backward(); break; case '3': shift_left(); break; case '4': shift_right(); break; case '5': turn_left(); break; case '6': turn_right(); break; default: Reset(); break; } } /* USER CODE END 3 */资源上传啦,可能要审核一阵子 |


 在每个TIM下配置如下
在每个TIM下配置如下 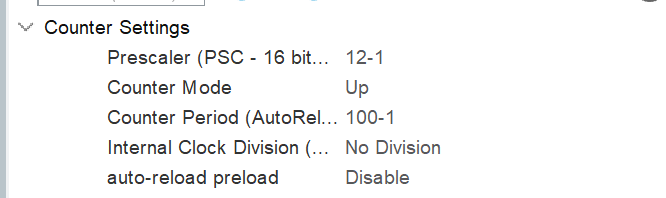 这样频率就是24MHz/12/100=20kHz,可以根据自己的需求调整频率大小。
这样频率就是24MHz/12/100=20kHz,可以根据自己的需求调整频率大小。
 仅提供了TIM的配置过程,串口可查看其他资料(也许有需要我以后会写)
仅提供了TIM的配置过程,串口可查看其他资料(也许有需要我以后会写)【本文地址】
公司简介
联系我们
今日新闻 |
点击排行 |
|
推荐新闻 |
|
图片新闻 |
|
专题文章 |