数字信号处理10 |
您所在的位置:网站首页 › 飞机雷达反射面积 › 数字信号处理10 |
数字信号处理10
|
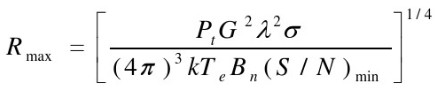
目录 一、雷达方程 二、距离、速度、角度理论 一、雷达方程雷达方程又叫雷达距离方程,最大距离的计算。 1.首先是发射功率Pt,发射天线增益G
2.目标反射截面积RCS(Radar Cross-Section,σ西格玛) 雷达散射截面是度量目标在雷达波照射下所产生回波强度的一种物理量,简称RCS。它是目标的假想面积,用一个各向均匀的等效反射器的投影面积来表示,该等效反射器与被定义的目标在接收方向单位立体角内具有相同的回波功率。一般用符号σ表示目标的雷达散射截面。有两种表达方式: 1平方米:一架飞机的RCS不是一个单值,对于每个视角、不同雷达频率等都对应不同的RCS。例如F-16的某个波段的RCS值正前方为4平方米,而侧向则大于100平方米 2分贝平方米(dBsm):用雷达散射截面的对数值的十倍来表示,符号是σdBsm,单位是分贝平方米(dBsm),即σdBsm=10lgσ。例如,RCS值0.1平方米对应的是-10分贝平方米(即-10dBsm)。
目标处面积σ对于雷达天线所张的立体角为 目标接收到的功率:
3.目标截获到入射波功率后再均匀地向整个空间辐射,单位立体角内辐射功率为
4.接收机接收到目标回波
此时雷达天线接收到功率为:
接收机能检测到回波信号的最小功率为S_min,即P_r >S_min(下面是P_r)
于是:
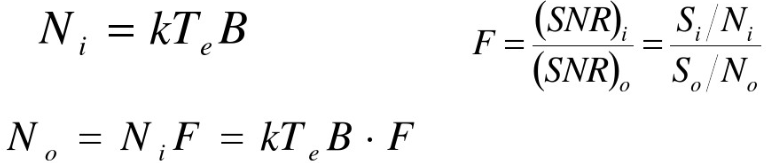
那么S_min 与什么有关呢 6.最小检测功率 考虑到实际损耗和环境因素,且雷达方程中存在有效反射面积和最小可检测信号,它们常作为估算值,反射截面积对不同目标有不同的定义,最小检测信号根据输入输出端损耗功率和检验统计量计算 输出端噪声功率:
输入端信号功率:
最小可检测功率为:
由此可得:
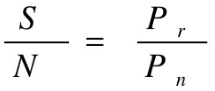
信噪比为:
接收机系统噪声功率:
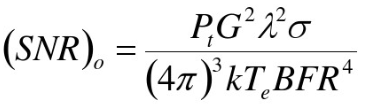
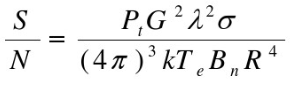
所以信噪比为
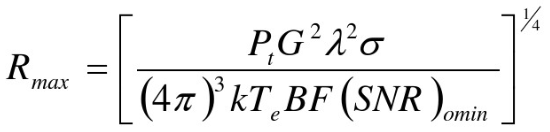
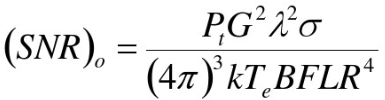
得到:
或者
功率和dB的关系: dB的引入是为了把乘除关系变为加减便于工程运算。[dB] = 10lg(输出功率w/输出功率w),如输入功率为1w输出功率1000w,那么系统增益为10lg(1000/1) = 30dB; dBm表示功率的绝对值。最常用的单位1mW,与mW 有关的分贝单位就是 dBm。1mW=0dBm 、2mW =3dBm 、1000mW=30dBm; 在雷达中由于最后表示的是接收功率与接收机噪音的比值,所以一般使用db进行加减运算 二、距离、速度、角度理论3DFFT 分别在距离维,速度维,天线维FFT; 距离维有256个sample, 速度维有128个chirps,天线维角度维有4个通道;每个chirp采样256个点,涉及到采样定理,最终形成256x128x4cell
测量距离: FMCW是连续波线性调频脉冲信号,fc是起始频率,fc+B/2 *k是中心频率,也叫载频.采样采集的是中频信号(如图4所示).
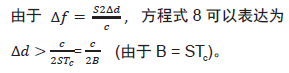
但是实际情况下并非全采样,f_IF/ B = tao/T_pri, 代入tao,求得,d = C/2 * T_pri/ B * f_IF B' = B/(fs/n_sample *T_pri) = B/T_pri *n_sample *1/fs 傅里叶变换理论:观测窗口(Tc)可以分辨间隔超过1/T HZ的频率分量,意味着频率差满足
测量速度: 经过CFAR检测之后然后检测峰值确实会得到Range 和Doppler的峰值索引,也就是多个chirps测速法,但是最大不模糊速度为十几m/s,在实际使用中并不满足需求超出不模糊速度就会产生速度模糊,因此需要对速度扩展,中国余数定理是很好的速度扩展算法,对速度进行解模糊。后面博客会对讲解中国余数定理原理和在雷达中的应用 。 连续发射间隔Tc的连续波
由于相位差在 |














【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |