学习日记 |
您所在的位置:网站首页 › 面板驱动原理是什么意思 › 学习日记 |
学习日记
|
SPI理论基础知识
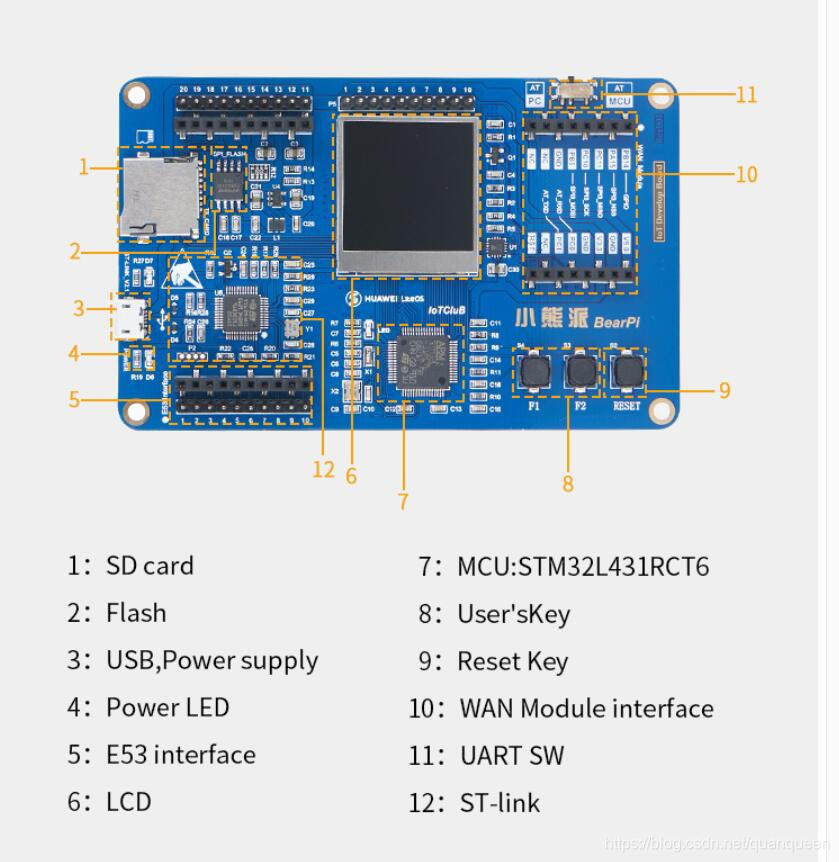
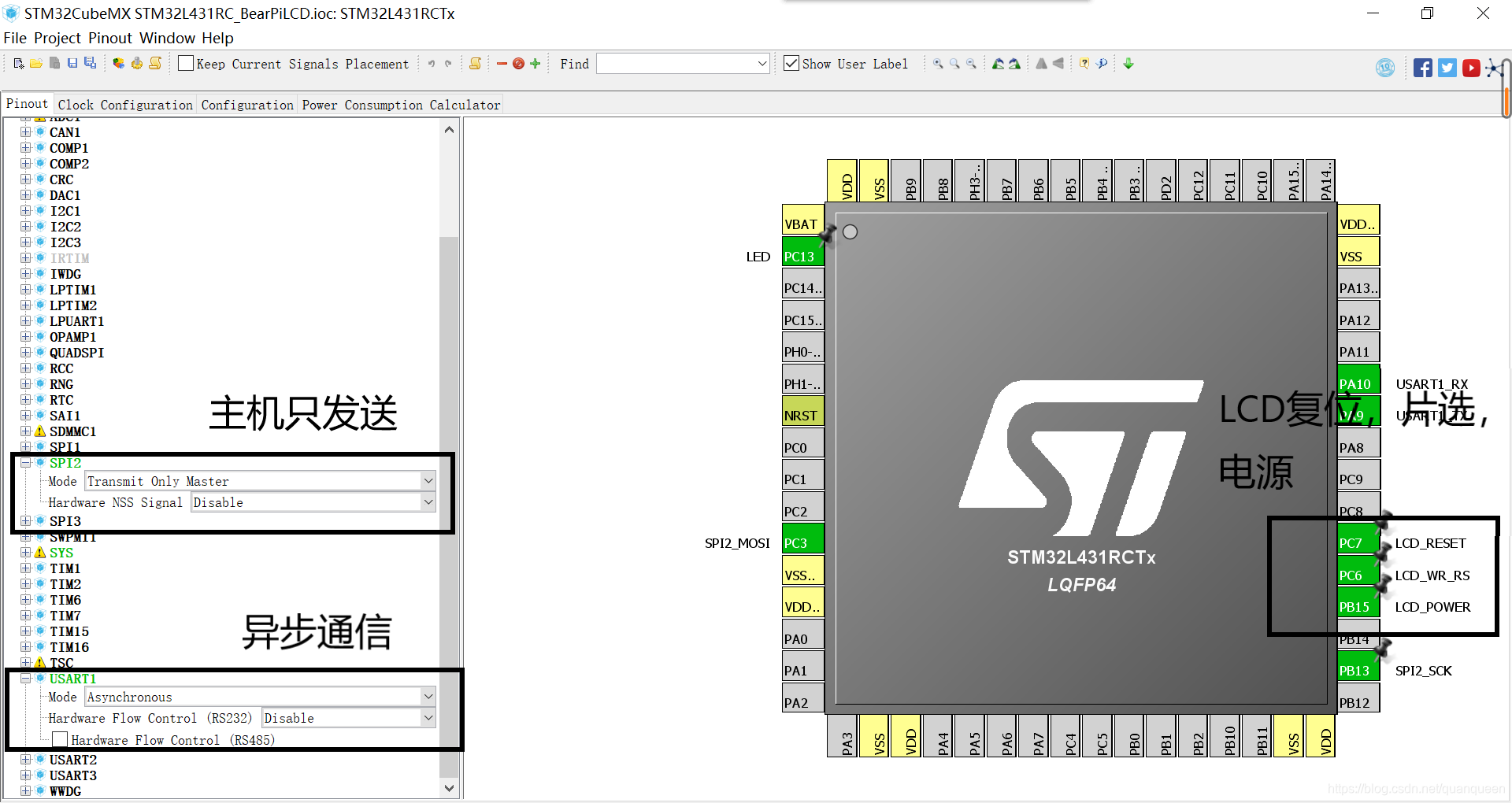
• SPI(Serial Peripheral Interface): • 串行外设接口,是 Motorola 公司推出的一 种同步串行接口技术,是一种高速的,全双工,同步的 通信总线。 • SPI主要采用四线制: • SS(Slave Select):从设备使能信号,由主设备控 制。; • SCK (Serial Clock):时钟信号线,由主设备发出; • MOSI (Master Output Slave Input): 主设备输出 / 从设备输入引脚; • MISO(Master Input Slave Output): 主设备输入 / 从设备输出引脚。 SPI的优缺点1、SPI优点 1)支持全双工通信 2) 通信简单 3)数据传输速率快 2、缺点 1)没有指定的流控制,没有应答机制确认是否接收到数据 2)可靠性上有一定的缺陷。 3、特点 1)高速、同步、全双工、非差分、总线式 2)主从机通信模式 SPI的通讯模式• 通信模式,具体如下: • Mode0:CPOL=0,CPHA=0 • Mode1:CPOL=0,CPHA=1 • Mode2:CPOL=1,CPHA=0 • Mode3:CPOL=1,CPHA=1 • 时钟极性CPOL是用来配置SCLK的电平出于哪种状态时是空闲态或者有效态,时钟相位CPHA • 是用来配置数据采样是在第几个边沿: • CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时 • CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时 • CPHA=0,表示数据采样是在第1个边沿,数据发送在第2个边沿 • CPHA=1,表示数据采样是在第2个边沿,数据发送在第1个边沿 查找开发板上LCD如图,6为开发板上的LCD,分辨率为240*240 1)PC3为SPI2_MOSI主出/从入引脚; 2)PB13为SPI2_SCK时钟引脚; 3)PC6为LCD_WR_RS片选引脚; 4)PC7为LCD_RESET复位引脚; 5)PB15为LCD_POWER电源引脚; 6)PA9为UART1发送引脚; 7)P10为UART1接收引脚; 8)PC13为LED引脚。 可根据原理图查找LCD引脚,找到引脚后,在STM32CubeMX上配置引脚 配置引脚
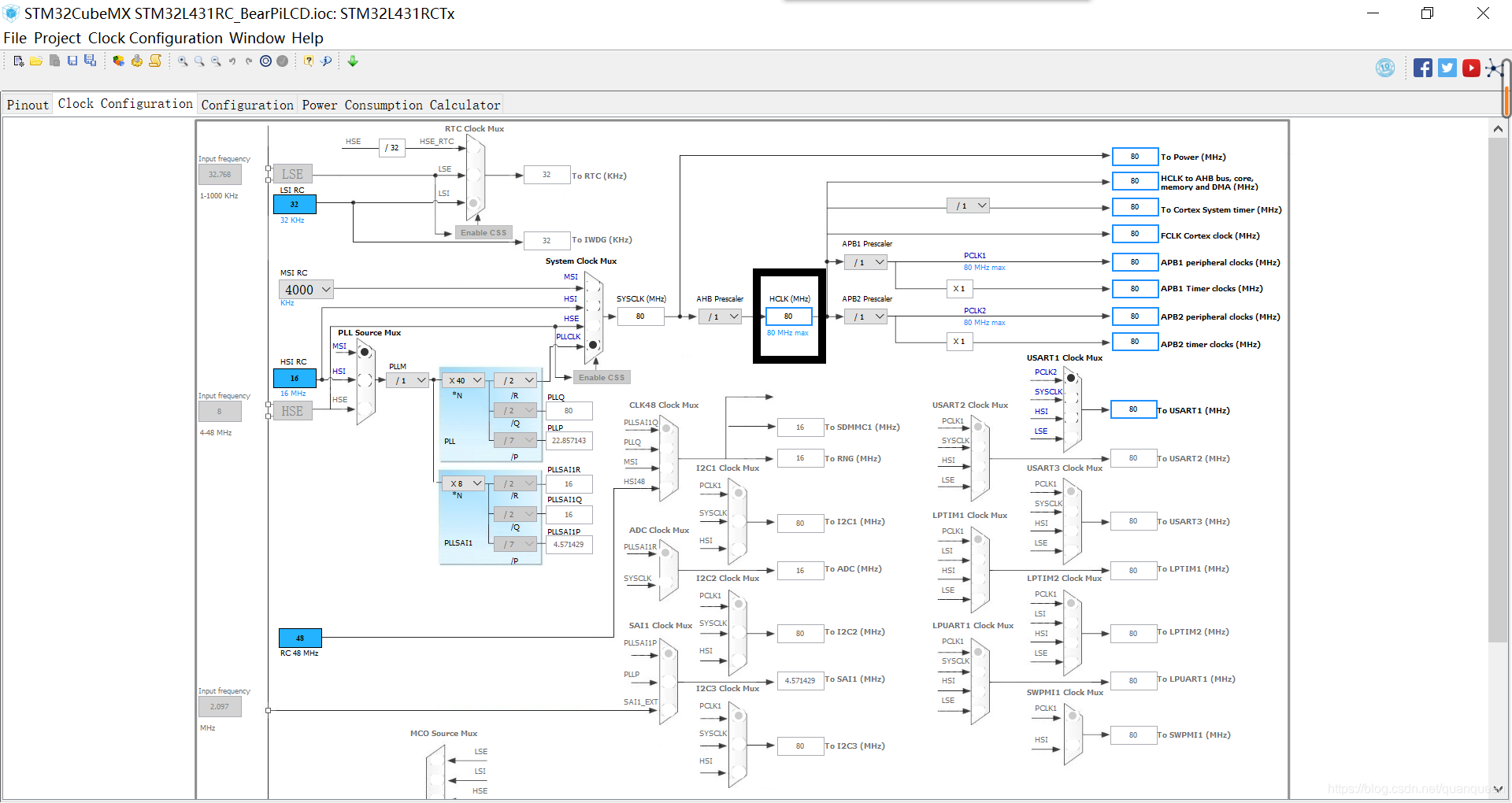
采用内部时钟(默认)配置系统时钟最高80MHZ
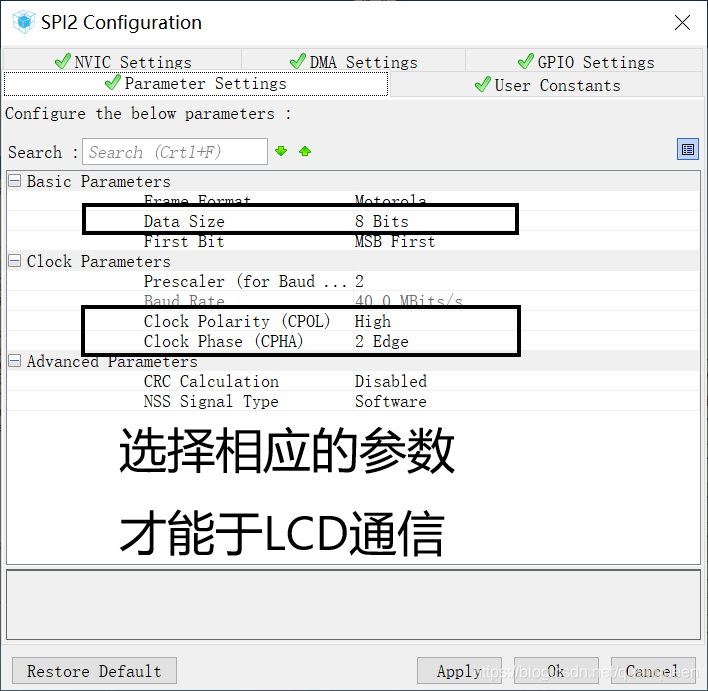
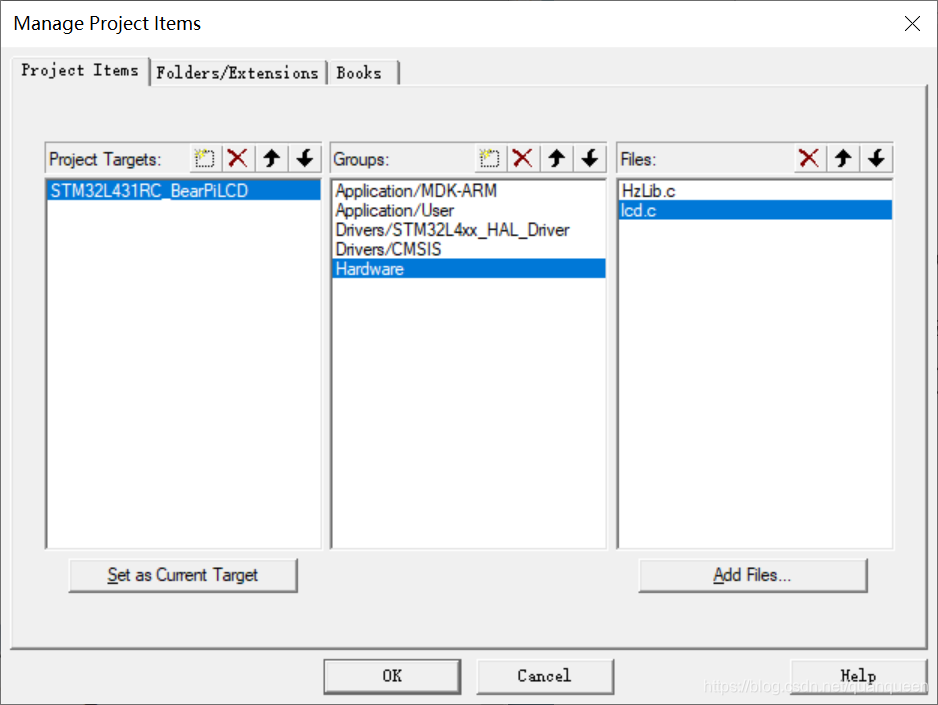
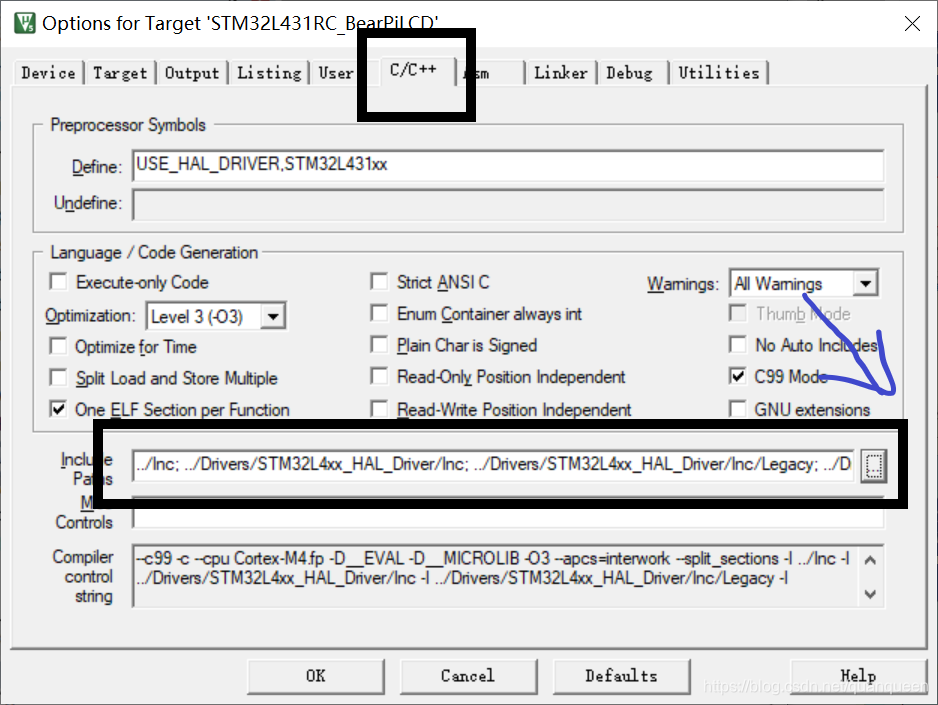
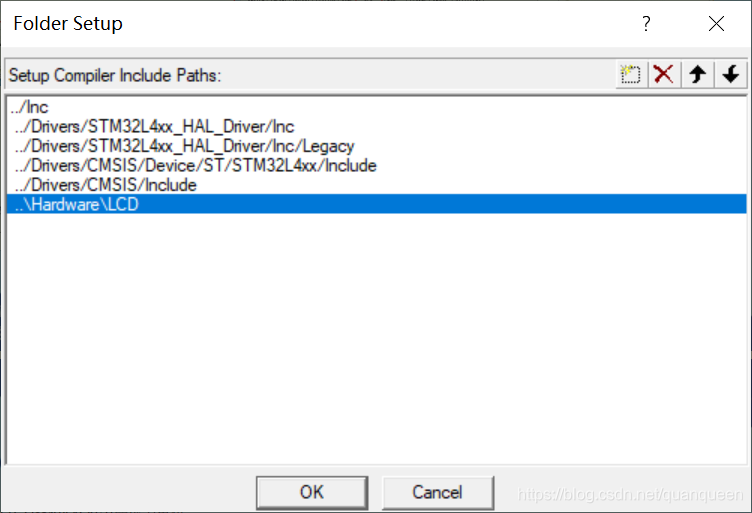
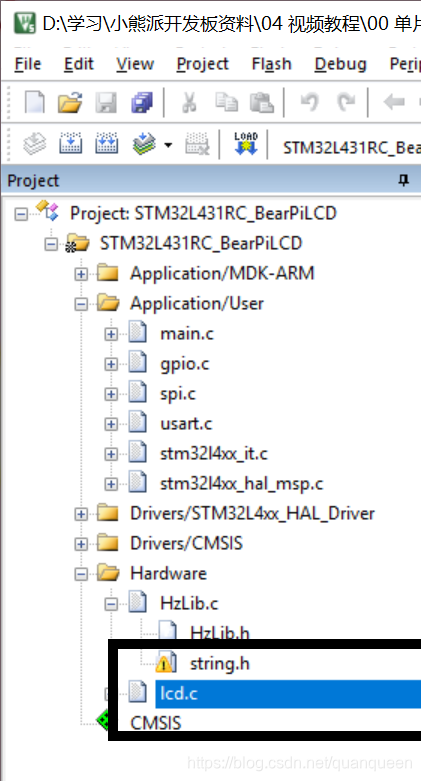
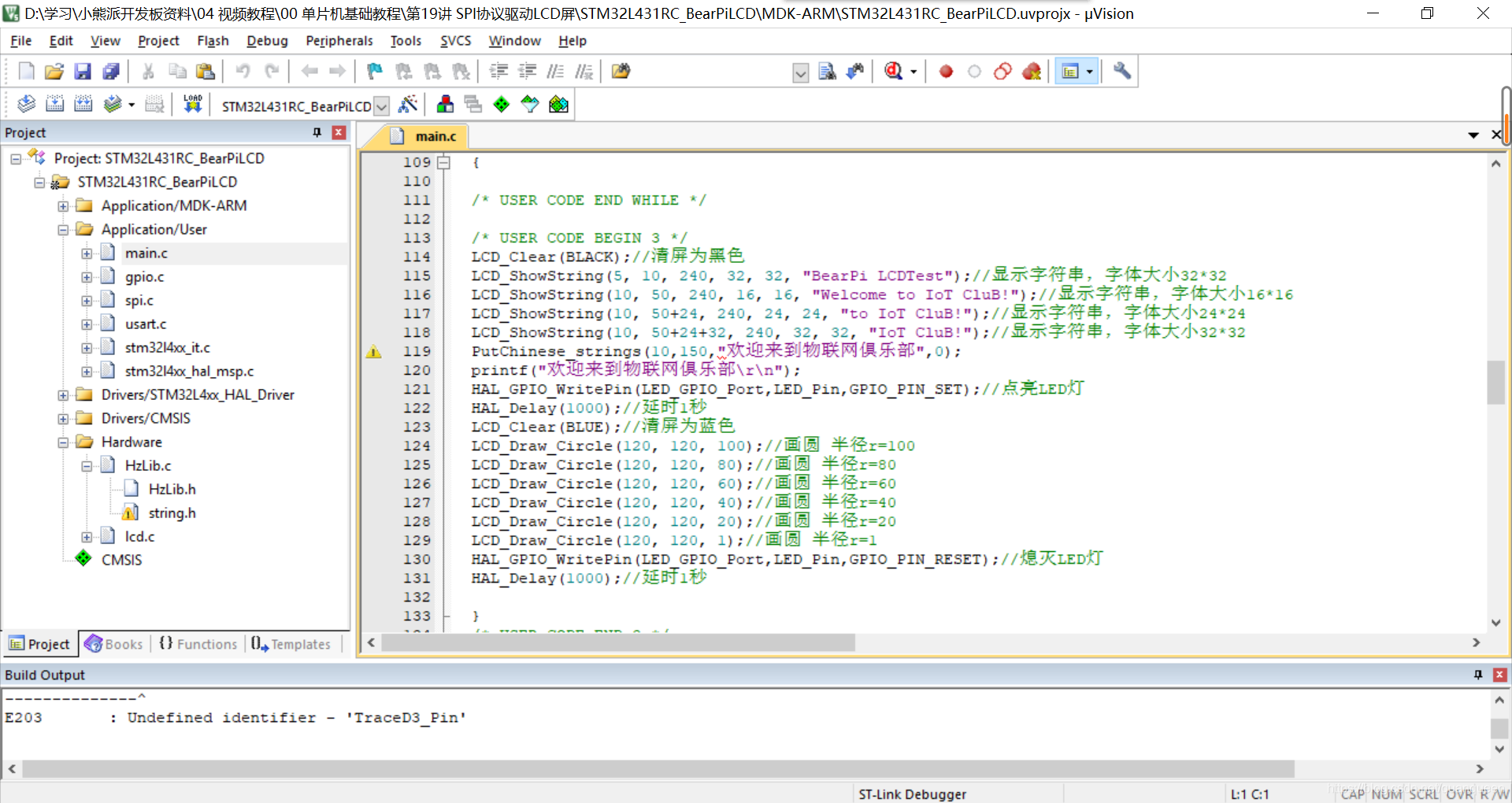
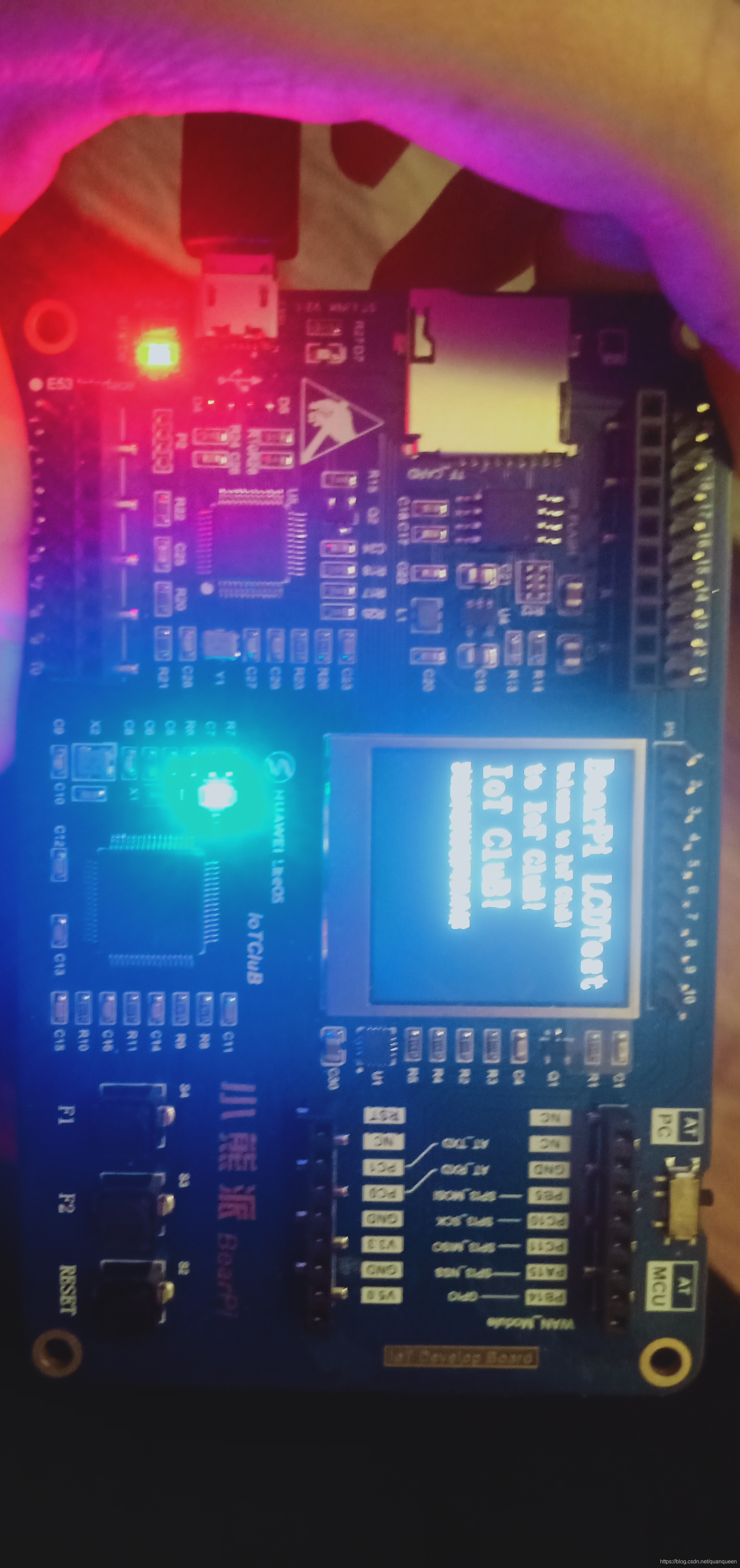
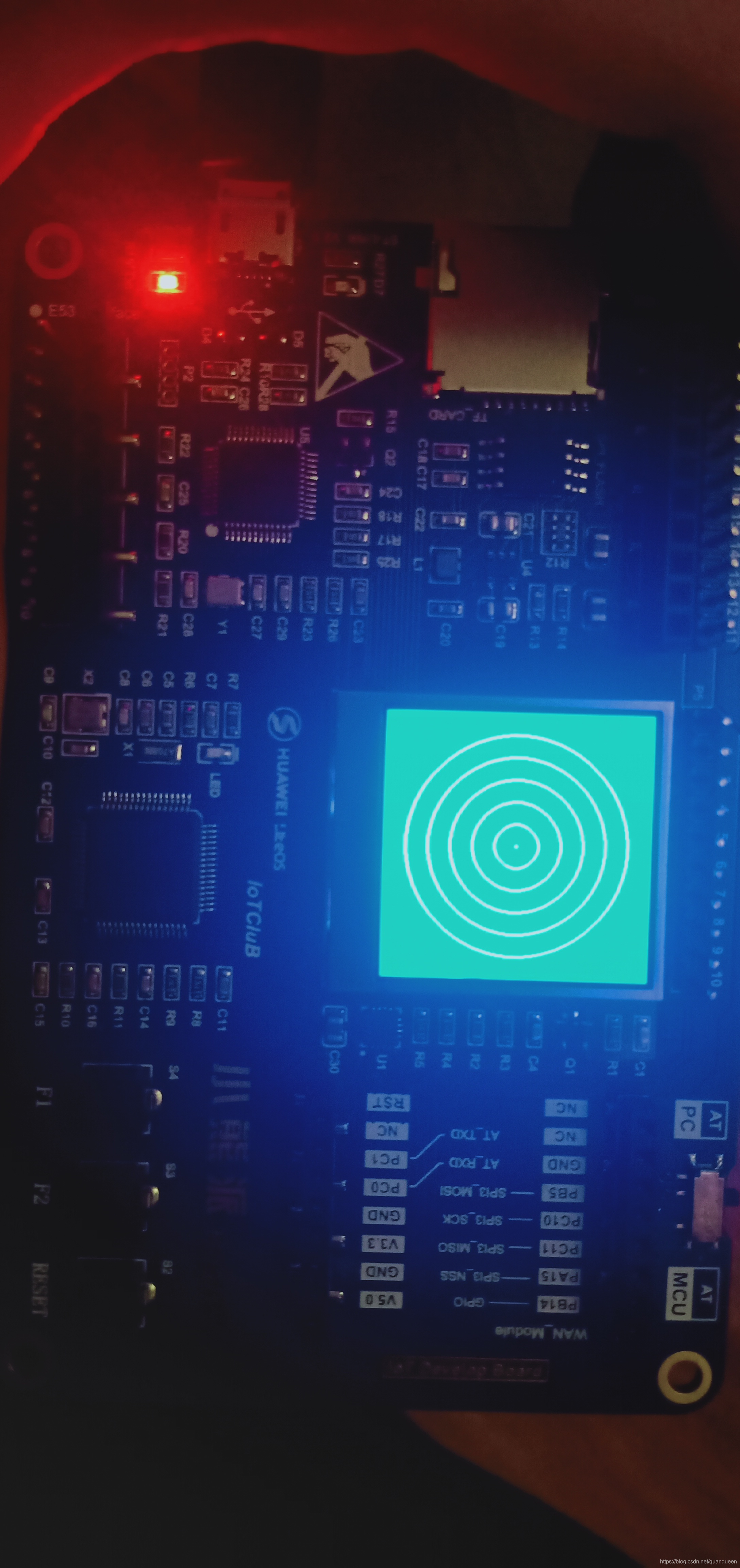
1、自定义工程名称。 2、选择英文路径,否则会丢 失启动文件而无法编译通过, 需要手动添加启动文件: startup_stm32l431xx.s 3、选择MDK-ARM V5开发软件, 即KEIL5软件。 代码编写说明1、初始化SPI硬件和通信协议参数。 2、SPI采用单向方式,也就是只用到三个引脚,即主出/从入,时钟,片选; 3、移植LCD驱动和接口函数; 4、使用LCD接口函数显示英文字符串(也可显示汉字); 5、使用LCD接口函数显示不同字体大小的字符串; 6、使用LCD接口函数画圆。 调用函数: 1、HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t pData, uint16_t Size, uint32_t Timeout); 2、HAL_GPIO_WritePin(GPIO_TypeDef GPIOx, uint16_t GPIO_Pin);//主函数中点亮LED 3、void HAL_Delay(uint32_t Delay);延时函数 移植LCD驱动和接口函数
|
【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |