adams做动态静力学分析(牛头刨床为例)机械原理课设(完整) |
您所在的位置:网站首页 › 静态分析怎么分析 › adams做动态静力学分析(牛头刨床为例)机械原理课设(完整) |
adams做动态静力学分析(牛头刨床为例)机械原理课设(完整)
|
adams做动态静力学分析(牛头刨床为例)机械原理课设(完整)
前言
在上一篇博客基础上,进行拓展。刚学的adams,一些细节处理,花了一段时间弄明白。分享出来帮到同学们和新手们,避免一些坑。如果有帮助的话点个赞,或者关注涨粉,有问题的话下方评论。 介于文章篇幅限制,不可能非常详细,对于 没有接触过adams且对下文描述操作不清楚的 同学,建议先刷一遍教程。我刷的是: 【ADAMS2019从入门到精通(基础篇)】快速上手Adams,全面讲解 https://www.bilibili.com/video/BV1Xg4y1z7uX?p=4 两倍速刷即可,掌握基本的安装和操作 上一篇博客链接: solidworks做动态静力学分析Motion(牛头刨床为例)机械原理课设(停止中断) https://blog.csdn.net/lxtm5/article/details/106605107 动态静力分析的简述、题目及解析 都已经介绍过了,在这不赘述 solidworks模型的导入到adams,关节约束模型加了两个pin(红色) solidworks另存为的格式,名称用英文 1.添加固定副,下图下方有选择的英文提示 2.添加铰链 3.添加动力 4.添加滑动副 参考别人的博客: 利用Solidworks Motion将带有质量信息和关节约束的三维模型导入ADAMS https://blog.csdn.net/weixin_38294178/article/details/74002293?depth_1- 一些问题其评论下方已有解答 1、添加力的函数,单一力 由此我们要找运动位移和速度, 具体操作如下: 把速度和位移代入上式,得到 IF(VX(MARKER_34, MARKER_9, MARKER_9, MARKER_9):0,0,IF(DX(MARKER_34, MARKER_9, MARKER_9)-168:IF(DX(MARKER_34, MARKER_9, MARKER_9)+168:0,-9000,-9000),0,0)) 仿真如下,为便于观察,设置前两参数使速度慢点,当有阻力使有红箭头存在,存在情况满足题目要求。 发现杆3的质心有点偏离圆心 设置杆件3的质量和转动惯量,注意到质心坐标x轴垂直界面,所以是Ixx 单位kgmmmm 一秒转360度 原c语言以15度显示一次数据 360/15=24 仿真步数设为24 先点击红色圈内,设置自变量为数据(x轴),数据设置为上述坐标系原点的位移,如下图,先来验证下力的函数是否正确 这里先选测量传感器,用角度作为图像x坐标 在指定位置 添加几行代码如下 FILE *fp1, *fp2, *fp3, *fp4, *fp5 ; //用于生成txt文件,单一类型格式,复制到表格中好核对 if((fp1=fopen("force1.txt","w"))==NULL) { printf("Can't open this file./n"); exit(0); }fprintf(fp1,"%13.3f\n" ,fr1) ; 编译运行没问题,在文件夹中运行exe文件会生成数据 C语言操作一样的 if((fp2=fopen("angle1.txt","w"))==NULL) { printf("Can't open this file./n"); exit(0); }fprintf(fp2,"%13.3f\n" ,bt1/dr) ; 角度大体都是一样的,有的可能因为atan的问题,还要补加180(红色部分),有的+360的肯定是没问题的 操作都是一样的,只不过选的铰链不同而已,不赘述,直接看结果。数据处理,±180(红色部分)或±360,还是有点误差。当算不出结果时,一定记得设置单元格格式为常规 同样的操作不赘述 终于做完了,一些结果存在误差或感觉有点问题,不知道你们的结果怎么样?欢迎探讨,提意见或问题,欢迎评论 参考资料1.《机械原理课程设计》 王淑仁 2.段胜儒牛头刨床 http://www.doc88.com/p-9955781305463.html 3.solidworks做运动学分析Motion(牛头刨床为例)机械原理课设(详细) https://blog.csdn.net/lxtm5/article/details/106579578 4.solidworks做动态静力学分析Motion(牛头刨床为例)机械原理课设(停止中断) https://blog.csdn.net/lxtm5/article/details/106605107 5.利用Solidworks Motion将带有质量信息和关节约束的三维模型导入ADAMS https://blog.csdn.net/weixin_38294178/article/details/74002293?depth_1- 6.ADAMS2019从入门到精通(基础篇)】快速上手Adams,全面讲解 https://www.bilibili.com/video/BV1Xg4y1z7uX?p=4 补充修正在与同组同学的交流讨论下,最终发现了之前存在问题的原因,即力的方向角度(补±180)和力矩部分符号不对的问题。在这也非常感谢。分享与交流还是很能促进问题的发现与解决。 问题在于 之前给的工作阻力有问题。回顾一下: IF(VX(MARKER_34, MARKER_9, MARKER_9, MARKER_9):0,0,IF(DX(MARKER_34, MARKER_9, MARKER_9)-168:IF(DX(MARKER_34, MARKER_9, MARKER_9)+168:0,-9000,-9000),0,0)) 最后结果如下: 点1处的力和角度 |

 打开adam,新建模型
打开adam,新建模型  导入文件,文件读取处双击空白选择
导入文件,文件读取处双击空白选择 
 刷新显示
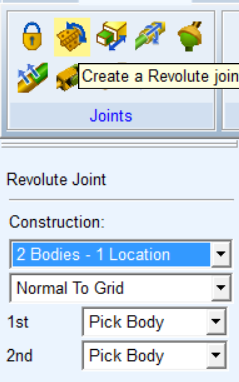
刷新显示  添加约束
添加约束 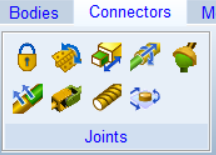
 左边菜单栏找到下图约束栏,右键点击可修改约束,或双击左键
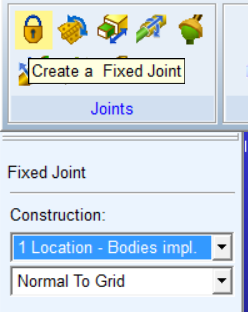
左边菜单栏找到下图约束栏,右键点击可修改约束,或双击左键 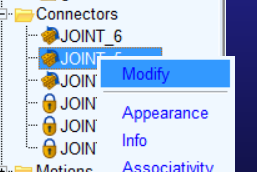 固定的一端要设置为大地,设置描述如下图
固定的一端要设置为大地,设置描述如下图 
 中间的黄球可调整显示模式
中间的黄球可调整显示模式  核对选择的是否正确,不正确的要修改
核对选择的是否正确,不正确的要修改 
 一秒转360度
一秒转360度 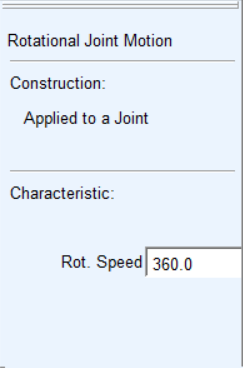 加了一部分约束,先仿真看看效果,看看约束加的是否正确,便于修改
加了一部分约束,先仿真看看效果,看看约束加的是否正确,便于修改 
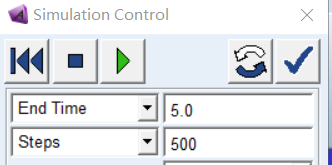 前两个参数可修改,可确定仿真时间和步数,便于观察,后续还有细讲
前两个参数可修改,可确定仿真时间和步数,便于观察,后续还有细讲  驱动方向不对,可加负号
驱动方向不对,可加负号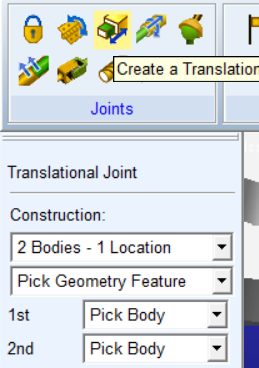
 为便于选择,点击零件,右键选择隐藏遮挡零件
为便于选择,点击零件,右键选择隐藏遮挡零件 这种方法就要让solidworks设置的配合和adams兼容,具体操作这里不赘述。因为该构件简单,我这次没用这种方法。
这种方法就要让solidworks设置的配合和adams兼容,具体操作这里不赘述。因为该构件简单,我这次没用这种方法。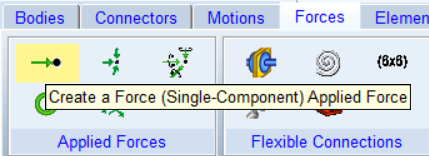 力是随物体移动的,力的作用如下图红坐标系原点
力是随物体移动的,力的作用如下图红坐标系原点  点击红色圈,函数
点击红色圈,函数  可以看到这里也有IF语句,用法和solidworks是一样的
可以看到这里也有IF语句,用法和solidworks是一样的  在solidworks中,我们输入的表达式是: IF({速度2}:0,0,IF({线性位移11}-168:IF({线性位移11}+168:0,-9000,-9000),0,0))
在solidworks中,我们输入的表达式是: IF({速度2}:0,0,IF({线性位移11}-168:IF({线性位移11}+168:0,-9000,-9000),0,0)) x方向的位移找到,点红色圈内,选择从哪个坐标系开始测量,到哪个坐标系,沿哪个坐标系可以是以上两坐标系之一
x方向的位移找到,点红色圈内,选择从哪个坐标系开始测量,到哪个坐标系,沿哪个坐标系可以是以上两坐标系之一

 右键–marker–browse—找到如下图
右键–marker–browse—找到如下图 
 接下来找速度
接下来找速度  速度也是一样的步骤
速度也是一样的步骤  IF({速度2}:0,0,IF({线性位移11}-168:IF({线性位移11}+168:0,-9000,-9000),0,0))
IF({速度2}:0,0,IF({线性位移11}-168:IF({线性位移11}+168:0,-9000,-9000),0,0)) 2.设置杆的质心
2.设置杆的质心 新建一个坐标系,加在零件上,圆心会自动识别的
新建一个坐标系,加在零件上,圆心会自动识别的 
 设置质心位置如下图即可
设置质心位置如下图即可  设置杆5的质心 一样的操作
设置杆5的质心 一样的操作  3.设置杆件的质量和转动惯量
3.设置杆件的质量和转动惯量 设置杆件5的质量
设置杆件5的质量  为减少计算误差,其他杆件均设为0
为减少计算误差,其他杆件均设为0 
 点击图表处理模块
点击图表处理模块  注意到杆5上的一个坐标系原点,用它相对于整个装配模型原点的位置横坐标作为x,自变量
注意到杆5上的一个坐标系原点,用它相对于整个装配模型原点的位置横坐标作为x,自变量 
 纵坐标,先选择力,再点红圈,添加图像
纵坐标,先选择力,再点红圈,添加图像  可以看到效果大体还可以,当时力变化不是突变,而是一条斜线,就是因为前面的步长给的是24,绘图精度不够
可以看到效果大体还可以,当时力变化不是突变,而是一条斜线,就是因为前面的步长给的是24,绘图精度不够  打开仿真,先把步长改为240,运行仿真一次 再重复上述操作,不同的是,横线部分更改为再建一个图,最后点圈内生成图按钮
打开仿真,先把步长改为240,运行仿真一次 再重复上述操作,不同的是,横线部分更改为再建一个图,最后点圈内生成图按钮  这回效果好多了,点击黄色部分按钮,能捕捉点
这回效果好多了,点击黄色部分按钮,能捕捉点  效果可以,x还是很接近-168的,可以看到有两条线,底下为0的线 是速度为反方向时 位置对应的力。
效果可以,x还是很接近-168的,可以看到有两条线,底下为0的线 是速度为反方向时 位置对应的力。 
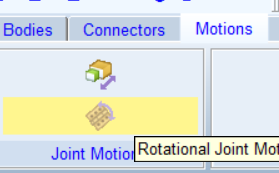
 界面选择 Motion(添加的运动)
界面选择 Motion(添加的运动)  参数设置如下图
参数设置如下图  确定得到如下图
确定得到如下图 打开仿真,先把步长改为24,运行仿真一次 完成结果如下图
打开仿真,先把步长改为24,运行仿真一次 完成结果如下图  右键转换为全图
右键转换为全图  结果显示如下,点圈内显示最大最小值,情况符合实际情况
结果显示如下,点圈内显示最大最小值,情况符合实际情况  用测量的角度作为图像x坐标 先在source下拉设置为测量,x坐标由time切换到date,选择测量角度
用测量的角度作为图像x坐标 先在source下拉设置为测量,x坐标由time切换到date,选择测量角度  (原机构简图对应)1点对应的是铰链5
(原机构简图对应)1点对应的是铰链5  设置y坐标如下图,先添加x方向的力
设置y坐标如下图,先添加x方向的力  点添加曲线,曲线如下
点添加曲线,曲线如下  再在原图上添加y方向的力
再在原图上添加y方向的力  点添加曲线,曲线如下
点添加曲线,曲线如下  点击曲线编辑工具
点击曲线编辑工具  先实现FxFx曲线的运算,再实现FyFy曲线的运算,
先实现FxFx曲线的运算,再实现FyFy曲线的运算, 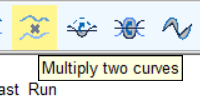 得到新的两条曲线,至此一共四条
得到新的两条曲线,至此一共四条  让新得的两条曲线相加,即FxFx+FyFy
让新得的两条曲线相加,即FxFx+FyFy  至此一共5条
至此一共5条  导出表格操作
导出表格操作  填写形式如下
填写形式如下  右键 ----设置单元格格式----文本
右键 ----设置单元格格式----文本  开根号得力的大小,注意所在格的单元格格式为—常规
开根号得力的大小,注意所在格的单元格格式为—常规 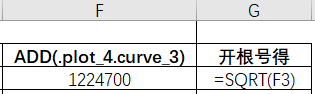 拖动下拉即可得到所有角度对应的力的大小
拖动下拉即可得到所有角度对应的力的大小  C语言工作目录下新建一个文本 -----force1.txt
C语言工作目录下新建一个文本 -----force1.txt 把txt中的数据一次性复制到表格中对比,大体数据差不多,或多或少有些计算误差
把txt中的数据一次性复制到表格中对比,大体数据差不多,或多或少有些计算误差  关于角度的计算如下
关于角度的计算如下  下拉得到全部
下拉得到全部

 结果如下,180°后面的感觉符号有问题,不知道。。。大小是差不多的
结果如下,180°后面的感觉符号有问题,不知道。。。大小是差不多的  另一种操作形式求合力矩
另一种操作形式求合力矩  按趋势来讲,变号部分为红色,180°前面的感觉符号有问题,
按趋势来讲,变号部分为红色,180°前面的感觉符号有问题, 
 点2处的力和角度
点2处的力和角度  主动杆件1的平衡力矩
主动杆件1的平衡力矩  可以看到整体效果还是很好的,就只有在-90°的时候,两个力的角度相差180(红色字体部分)
可以看到整体效果还是很好的,就只有在-90°的时候,两个力的角度相差180(红色字体部分)【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |