卷积神经网络CNN、感受野、边缘检测、卷积层(零填充padding、步长、多通道卷积、多卷积核)、池化层Pooling、全连接层 |
您所在的位置:网站首页 › 网络的边缘是什么 › 卷积神经网络CNN、感受野、边缘检测、卷积层(零填充padding、步长、多通道卷积、多卷积核)、池化层Pooling、全连接层 |
卷积神经网络CNN、感受野、边缘检测、卷积层(零填充padding、步长、多通道卷积、多卷积核)、池化层Pooling、全连接层
 日萌社 日萌社
人工智能AI:Keras PyTorch MXNet TensorFlow PaddlePaddle 深度学习实战(不定时更新) 3.3 卷积神经网络(CNN) 3.3.1 为什么需要卷积神经网络在计算机视觉领域,通常要做的就是指用机器程序替代人眼对目标图像进行识别等。那么神经网络也好还是卷积神经网络其实都是上个世纪就有的算法,只是近些年来电脑的计算能力已非当年的那种计算水平,同时现在的训练数据很多,于是神经网络的相关算法又重新流行起来,因此卷积神经网络也一样流行。 1974年,Paul Werbos提出了误差反向传导来训练人工神经网络,使得训练多层神经网络成为可能。1979年,Kunihiko Fukushima(福岛邦彦),提出了Neocognitron, 卷积、池化的概念基本形成。1986年,Geoffrey Hinton与人合著了一篇论文:Learning representations by back-propagation errors。1989年,Yann LeCun提出了一种用反向传导进行更新的卷积神经网络,称为LeNet。1998年,Yann LeCun改进了原来的卷积网络,LeNet-5。3.1.1.2 图像特征数量对神经网络效果压力 假设下图是一图片大小为28 * 28 的黑白图片时候,每一个像素点只有一个值(单通道)。那么总的数值个数为 784个特征。
那现在这张图片是彩色的,那么彩色图片由RGB三通道组成,也就意味着总的数值有28 28 3 = 2352个值。
从上面我们得到一张图片的输入是2352个特征值,即神经网路当中与若干个神经元连接,假设第一个隐层是10个神经元,那么也就是23520个权重参数。 如果图片再大一些呢,假设图片为1000*1000*3,那么总共有3百万数值,同样接入10个神经元,那么就是3千万个权重参数。这样的参数大小,神经网络参数更新需要大量的计算不说,也很难达到更好的效果,大家就不倾向于使用多层神经网络了。 所以就有了卷积神经网络的流行,那么卷积神经网络为什么大家会选择它。那么先来介绍感受野以及边缘检测的概念。 3.3.2 感受野的来源1962年Hubel和Wiesel通过对猫视觉皮层细胞的研究,提出了感受野(receptive field)的概念,Fukushima基于感受野概念提出的神经认知机(neocognitron)可以看作是卷积神经网络的第一个实现网络。 单个感受器与许多感觉神经纤维相联系,感觉信息是通过许多感受神经纤维得到神经冲动。一个神经元所反应的刺激区域就叫做神经元的感受野(receptive field)
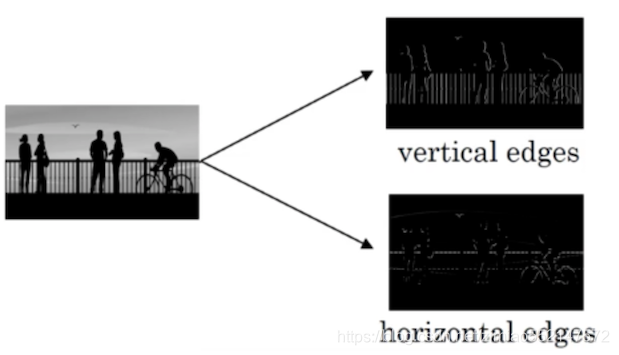
在机器视觉领域的深度神经网络中有一个概念叫做感受野,用来表示网络内部的不同位置的神经元对原图像的感受范围的大小。 3.3.3 边缘检测为了能够用更少的参数,检测出更多的信息,基于上面的感受野思想。通常神经网络需要检测出物体最明显的垂直和水平边缘来区分物体。比如
看一个列子,一个 6×6的图像卷积与一个3×3的过滤器(Filter or kenel)进行卷积运算(符号为 ), 也可能是矩阵乘法所以通常特别指定是卷积的时候代表卷积意思。 相当于将 Filter 放在Image 上,从左到右、从上到下地(默认一个像素)移动过整个Image,分别计算 ImageImage 被 Filter 盖住的部分与 Filter的逐元素乘积的和
在这个6×6 的图像中,左边一半像素的值全是 10,右边一半像素的值全是 0,中间是一条非常明显的垂直边缘。这个图像与过滤器卷积的结果中,中间两列的值都是 30,两边两列的值都是 0,即检测到了原 6×6 图像中的垂直边缘。 注:虽然看上去非常粗,是因为我们的图像太小,只有5个像素长、宽,所以最终得到结果看到的是两个像素位置,如果在一个500 x 500的图当中,就是一个竖直的边缘了。(通常正的表示亮,负的表示暗)
随着深度学习的发展,我们需要检测更复杂的图像中的边缘,与其使用由人手工设计的过滤器,还可以将过滤器中的数值作为参数,通过反向传播来学习得到。算法可以根据实际数据来选择合适的检测目标,无论是检测水平边缘、垂直边缘还是其他角度的边缘,并习得图像的低层特征。 3.3.4 卷积神经网络的组成 定义 卷积神经网络由一个或多个卷积层、池化层以及全连接层等组成。与其他深度学习结构相比,卷积神经网络在图像等方面能够给出更好的结果。这一模型也可以使用反向传播算法进行训练。相比较其他浅层或深度神经网络,卷积神经网络需要考量的参数更少,使之成为一种颇具吸引力的深度学习结构。我们来看一下卷积网络的整体结构什么样子。
其中包含了几个主要结构 卷积层(Convolutions)池化层(Subsampling)全连接层(Full connection)激活函数 3.3.4.1 卷积层 目的 卷积运算的目的是提取输入的不同特征,某些卷积层可能只能提取一些低级的特征如边缘、线条等层级,更多层的网路能从低级特征中迭代提取更复杂的特征。参数: size:卷积核/过滤器大小,选择有1*1,3*3,5 * 5padding:零填充,Valid 与Samestride:步长,通常默认为1 计算公式
对于之前介绍的卷积运算过程,我们用一张动图来表示更好理解些。一下计算中,假设图片长宽相等,设为N 一个步长,3 X 3 卷积核运算假设是一张5 X 5 的单通道图片,通过使用3 X 3 大小的卷积核运算得到一个 3 X 3大小的运算结果(图片像素数值仅供参考)
我们会发现进行卷积之后的图片变小了,假设N为图片大小,F为卷积核大小 相当于N - F + 1 = 5 - 3 + 1 = 3N−F+1=5−3+1=3 如果我们换一个卷积核大小或者加入很多层卷积之后,图像可能最后就变成了1 X 1 大小,这不是我们希望看到的结果。并且对于原始图片当中的边缘像素来说,只计算了一遍,二对于中间的像素会有很多次过滤器与之计算,这样导致对边缘信息的丢失。 缺点 图像变小边缘信息丢失 3.3.4.3 padding-零填充零填充:在图片像素的最外层加上若干层0值,若一层,记做p =1。 为什么增加的是0? 因为0在权重乘积和运算中对最终结果不造成影响,也就避免了图片增加了额外的干扰信息。
这张图中,还是移动一个像素,并且外面增加了一层0。那么最终计算结果我们可以这样用公式来计算: 5 + 2 * p - 3 + 1 = 55+2∗p−3+1=5 P为1,那么最终特征结果为5。实际上我们可以填充更多的像素,假设为2层,则 5 + 2 * 2 - 3 + 1 = 75+2∗2−3+1=7,这样得到的观察特征大小比之前图片大小还大。所以我们对于零填充会有一些选择,该填充多少? 3.3.4.4 Valid and Same卷积有两种两种形式,所以为了避免上述情况,大家选择都是Same这种填充卷积计算方式 Valid :不填充,也就是最终大小为 (N - F + 1) * (N - F + 1)(N−F+1)∗(N−F+1)Same:输出大小与原图大小一致,那么 NN变成了N + 2PN+2P (N + 2P - F + 1) * (N + 2P - F + 1)(N+2P−F+1)∗(N+2P−F+1)那也就意味着,之前大小与之后的大小一样,得出下面的等式
所以当知道了卷积核的大小之后,就可以得出要填充多少层像素。 3.3.4.5 奇数维度的过滤器通过上面的式子,如果F不是奇数而是偶数个,那么最终计算结果不是一个整数,造成0.5,1.5.....这种情况,这样填充不均匀,所以也就是为什么卷积核默认都去使用奇数维度大小 1*1,3*3, 5*5,7 7 另一个解释角度 奇数维度的过滤器有中心,便于指出过滤器的位置当然这个都是一些假设的原因,最终原因还是在F对于计算结果的影响。所以通常选择奇数维度的过滤器,是大家约定成俗的结果,可能也是基于大量实验奇数能得出更好的结果。 3.3.4.6 stride-步长以上例子中我们看到的都是每次移动一个像素步长的结果,如果将这个步长修改为2,那结果如何?
当输入有多个通道(channel)时(例如图片可以有 RGB 三个通道),卷积核需要拥有相同的channel数,每个卷积核 channel 与输入层的对应 channel 进行卷积,将每个 channel 的卷积结果按位相加得到最终的 Feature Map。
当有多个卷积核时,可以学习到多种不同的特征,对应产生包含多个 channel 的 Feature Map, 例如上图有两个 filter,所以 output 有两个 channel。这里的多少个卷积核也可理解为多少个神经元。
相当于我们把多个功能的卷积核的计算结果放在一起,比如水平边缘检测和垂直边缘检测器。 3.3.5 卷积总结我们来通过一个例子看一下结算结果,以及参数的计算
以下代码主要通过numpy进行实现,再此我们只介绍实现过程理解,并不需要大家手写这样的代码,帮助理解原理过程。卷积实现的难点在于如何通过图片和过滤器去循环图片获得区域。 def conv_(img, conv_filter): """ 卷积核计算操作 :param img: 图片数据 :param conv_filter: 卷积核 :return: """ # 1、获取卷积核的大小 filter_size = conv_filter.shape[1] # 初始化卷积后的结果,给个较大的输出结果 result = np.zeros((img.shape)) # 2、对图片进行循环使用卷积操作(获取当前区域并使用过滤器进行相乘操作.) # (1)r和c为特征图的下表,从0到特征图输出大小 for r in np.uint16(np.arange(filter_size/2.0, img.shape[0]-filter_size/2.0+1)): for c in np.uint16(np.arange(filter_size/2.0, img.shape[1]-filter_size/2.0+1)): # 取出过滤器大小的图片区域,从图片左上角开始 curr_region = img[r-np.uint16(np.floor(filter_size/2.0)):r+np.uint16(np.ceil(filter_size/2.0)), c-np.uint16(np.floor(filter_size/2.0)):c+np.uint16(np.ceil(filter_size/2.0))] # 图片当前区域与卷积核进行线性相乘 curr_result = curr_region * conv_filter # 结果求和并保存,按照下表保存 conv_sum = np.sum(curr_result) result[r, c] = conv_sum # 裁剪矩阵 final_result = result[np.uint16(filter_size/2.0):result.shape[0]-np.uint16(filter_size/2.0), np.uint16(filter_size/2.0):result.shape[1]-np.uint16(filter_size/2.0)] return final_result def conv(img, conv_filter): """ 卷积过程实现 :param img: 图像 :param conv_filter: 卷积过滤器 :return: """ # 1、输入的参数大小做异常检测 # 检查输入的图片和卷积核是否一样大小 if len(img.shape) != len(conv_filter.shape) - 1: print("Error: Number of dimensions in conv filter and image do not match.") exit() # 检查输入的图片的通道数和卷积的深度一样 if len(img.shape) > 2 or len(conv_filter.shape) > 3: if img.shape[-1] != conv_filter.shape[-1]: print("Error: Number of channels in both image and filter must match.") sys.exit() # 检查是否过滤器的长宽一样 if conv_filter.shape[1] != conv_filter.shape[2]: print('Error: Filter must be a square matrix. I.e. number of rows and columns must match.') sys.exit() # 检查过滤器的维度是奇数 if conv_filter.shape[1] % 2 == 0: print('Error: Filter must have an odd size. I.e. number of rows and columns must be odd.') sys.exit() # 2、初始化一个空的特征图来装入计算的结果 feature_maps = np.zeros((img.shape[0]-conv_filter.shape[1]+1, img.shape[1]-conv_filter.shape[1]+1, conv_filter.shape[0])) # 3、图片的卷积完整操作(分别使用每一个过滤器进行过滤操作) for filter_num in range(conv_filter.shape[0]): print("Filter ", filter_num + 1) # 获取当前的filter参数 curr_filter = conv_filter[filter_num, :] # 当前filter进行卷积核计算操作 if len(curr_filter.shape) > 2: # 对图片的每个channel进行卷积运算 conv_map = conv_(img[:, :, 0], curr_filter[:, :, 0]) for ch_num in range(1, curr_filter.shape[-1]): conv_map = conv_map + conv_(img[:, :, ch_num], curr_filter[:, :, ch_num]) else: # 只有一个filter的情况 conv_map = conv_(img, curr_filter) feature_maps[:, :, filter_num] = conv_map return feature_maps # 使用过程 # 1、定义这层有两个卷积核,每个大小3x3(例子默认对黑白图片进行计算),默认一个步长,不零填充 l1_filter = np.zeros((2,3,3)) # 初始化参数 l1_filter[0, :, :] = np.array([[[-1, 0, 1], [-1, 0, 1], [-1, 0, 1]]]) l1_filter[1, :, :] = np.array([[[1, 1, 1], [0, 0, 0], [-1, -1, -1]]]) # 卷积计算 l1_feature_map = cnn.conv(img, l1_filter)
池化层主要对卷积层学习到的特征图进行亚采样(subsampling)处理,主要由两种 最大池化:Max Pooling,取窗口内的最大值作为输出 平均池化:Avg Pooling,取窗口内的所有值的均值作为输出意义在于: 降低了后续网络层的输入维度,缩减模型大小,提高计算速度提高了Feature Map 的鲁棒性,防止过拟合
卷积层+激活层+池化层可以看成是CNN的特征学习/特征提取层,而学习到的特征(Feature Map)最终应用于模型任务(分类、回归): 先对所有 Feature Map 进行扁平化(flatten, 即 reshape 成 1 x N 向量)再接一个或多个全连接层,进行模型学习 3.3.5.6 案例:通过封装的接口构建一个卷积网络
3.3.5.6 案例:通过封装的接口构建一个卷积网络
目的:通过上述的卷积、池化、接口完成一个卷积网络的识别过程 步骤: 1、读取图片处理图片、转换图片到灰度图2、构建网络计算 relu激活函数的实现项目结构:
cnn_graph:为通过实现的CNN结构构建网络计算,numpyCNN是实现卷积、池化、relu激活函数接口文件 1、读取图片处理图片、转换图片到灰度图 # 导入包 import skimage.data import numpy as np from matplotlib import pyplot import cnn # 1、获取猫图片,转成单通道方便计算 img = skimage.data.chelsea() img = skimage.color.rgb2gray(img) # 定义过滤器(如上面介绍) l1_filter = np.zeros((2,3,3)) l1_filter[0, :, :] = np.array([[[-1, 0, 1], [-1, 0, 1], [-1, 0, 1]]]) l1_filter[1, :, :] = np.array([[[1, 1, 1], [0, 0, 0], [-1, -1, -1]]])2、构建网络计算 这里构建三层网络结构,卷积、激活、池化 # 构建第一层 print("第一个卷积、池化层计算") l1_feature_map = cnn.conv(img, l1_filter) l1_feature_map_relu = cnn.relu(l1_feature_map) l1_feature_map_relu_pool = cnn.pooling(l1_feature_map_relu, 2, 2) # 构建第二层 print("第一个卷积、池化层计算") l2_filter = np.random.rand(3, 5, 5, l1_feature_map_relu_pool.shape[-1]) l2_feature_map = cnn.conv(l1_feature_map_relu_pool, l2_filter) l2_feature_map_relu = cnn.relu(l2_feature_map) l2_feature_map_relu_pool = cnn.pooling(l2_feature_map_relu, 2, 2) # 构建第三层 l3_filter = np.random.rand(1, 7, 7, l2_feature_map_relu_pool.shape[-1]) l3_feature_map = cnn.conv(l2_feature_map_relu_pool, l3_filter) l3_feature_map_relu = cnn.relu(l3_feature_map) l3_feature_map_relu_pool = cnn.pooling(l3_feature_map_relu, 2, 2) relu函数的实现 def relu(feature_map): """ relu激活函数实现 :param feature_map: 输入的特征图 :return: """ # 准备特征输入到relu激活函数 relu_out = np.zeros(feature_map.shape) for map_num in range(feature_map.shape[-1]): for r in np.arange(0, feature_map.shape[0]): for c in np.arange(0, feature_map.shape[1]): relu_out[r, c, map_num] = np.max([feature_map[r, c, map_num], 0]) return relu_out 最后的输出显示绘图 # 3、画出输出结果 fig0, ax0 = pyplot.subplots(nrows=1, ncols=1) ax0.imshow(img).set_cmap("gray") ax0.set_title("Input Image") ax0.get_xaxis().set_ticks([]) ax0.get_yaxis().set_ticks([]) pyplot.savefig("in_img.png", bbox_inches="tight") pyplot.close(fig0) # 第三层卷积层输出结果显示 fig3, ax3 = pyplot.subplots(nrows=1, ncols=3) ax3[0].imshow(l3_feature_map[:, :, 0]).set_cmap("gray") ax3[0].get_xaxis().set_ticks([]) ax3[0].get_yaxis().set_ticks([]) ax3[0].set_title("L3-Map1") ax3[1].imshow(l3_feature_map_relu[:, :, 0]).set_cmap("gray") ax3[1].get_xaxis().set_ticks([]) ax3[1].get_yaxis().set_ticks([]) ax3[1].set_title("L3-Map1ReLU") ax3[2].imshow(l3_feature_map_relu_pool[:, :, 0]).set_cmap("gray") ax3[2].get_xaxis().set_ticks([]) ax3[2].get_yaxis().set_ticks([]) ax3[2].set_title("L3-Map1ReLUPool") pyplot.savefig("L3.png", bbox_inches="tight") pyplot.close(fig3)
3.3.6.1 为什么学习感受野 感受野的感念前面提到是1962年Hubel和Wiesel通过对猫视觉皮层细胞的研究,提出了感受野(receptive field)的概念,Fukushima基于感受野概念提出的神经认知机(neocognitron)可以看作是卷积神经网络的第一个实现网络。 1、感受野的理解有助于对分类、检测网络架构的设计有深入的思考2、感受野是卷积网络理解的基石,甚至自己去设计深度网络架构有着重要的作用。3.3.6.2 感受野定义 定义:在卷积神经网络中,感受野的定义是 卷积神经网络每一层输出的特征图(feature map)上的像素点在原始图像上映射的区域大小。 或者也叫:感受野(Receptive Field)指的是神经网络中神经元“看到的”输入区域,在卷积神经网络中,feature map上某个元素的计算受输入图像上某个区域的影响,这个区域即该元素的感受野。1、神经元感受野的值越大表示其能接触到的原始图像范围就越大,也意味着他可能蕴含更为全局、语义层次更高的特征;2、神经元感受野的值越小则表示其所包含的特征越趋向于局部和细节。因此感受野的值可以大致用来判断每一层的抽象层次。由于图像是二维的,具有空间信息,因此感受野的实质其实也是一个二维区域。但业界通常将感受野定义为一个正方形区域,因此也就使用边长来描述其大小下面这张图表示感受野的理解:  3.3.6.3 计算
3.3.6.3 计算
首先介绍cnn感受野计算公式:
下图为后面要介绍的VGG感受野大小计算对应图:  3.3.7 总结
卷积神经网路的组成卷积的计算过程
卷积过滤器个数卷积过滤器大小卷积过滤器步数卷积过滤器零填充池化的计算过程原理CNN结构的实现和构建实现程序
3.3.7 总结
卷积神经网路的组成卷积的计算过程
卷积过滤器个数卷积过滤器大小卷积过滤器步数卷积过滤器零填充池化的计算过程原理CNN结构的实现和构建实现程序
cnn.py import numpy as np import sys def conv_(img, conv_filter): """ 卷积核计算操作 :param img: 图片数据 :param conv_filter: 卷积核 :return: """ # 1、获取卷积核的大小 filter_size = conv_filter.shape[1] # 初始化卷积后的结果 result = np.zeros((img.shape)) # 2、对图片进行循环使用卷积操作(获取当前区域并使用过滤器进行相乘操作.) # (1)r和c为获取 for r in np.uint16(np.arange(filter_size/2.0, img.shape[0]-filter_size/2.0+1)): for c in np.uint16(np.arange(filter_size/2.0, img.shape[1]-filter_size/2.0+1)): curr_region = img[r-np.uint16(np.floor(filter_size/2.0)):r+np.uint16(np.ceil(filter_size/2.0)), c-np.uint16(np.floor(filter_size/2.0)):c+np.uint16(np.ceil(filter_size/2.0))] # 图片当前区域与卷积核进行线性相乘 curr_result = curr_region * conv_filter # 结果求和并保存 conv_sum = np.sum(curr_result) result[r, c] = conv_sum # 裁剪结果矩阵的异常值 final_result = result[np.uint16(filter_size/2.0):result.shape[0]-np.uint16(filter_size/2.0), np.uint16(filter_size/2.0):result.shape[1]-np.uint16(filter_size/2.0)] return final_result def conv(img, conv_filter): """ 卷积过程实现 :param img: 图像 :param conv_filter: 卷积过滤器 :return: """ # 1、输入的参数大小做异常检测 # 检查输入的图片和卷积核是否一样大小 if len(img.shape) != len(conv_filter.shape) - 1: print("Error: Number of dimensions in conv filter and image do not match.") exit() # 检查输入的图片的通道数和卷积的深度一样 if len(img.shape) > 2 or len(conv_filter.shape) > 3: if img.shape[-1] != conv_filter.shape[-1]: print("Error: Number of channels in both image and filter must match.") sys.exit() # 检查是否过滤器的长宽一样 if conv_filter.shape[1] != conv_filter.shape[2]: print('Error: Filter must be a square matrix. I.e. number of rows and columns must match.') sys.exit() # 检查过滤器的维度是奇数 if conv_filter.shape[1] % 2 == 0: print('Error: Filter must have an odd size. I.e. number of rows and columns must be odd.') sys.exit() # 2、初始化一个空的特征图来装入计算的结果 feature_maps = np.zeros((img.shape[0]-conv_filter.shape[1]+1, img.shape[1]-conv_filter.shape[1]+1, conv_filter.shape[0])) # 3、图片的卷积完整操作(分别使用每一个过滤器进行过滤操作) for filter_num in range(conv_filter.shape[0]): print("Filter ", filter_num + 1) # 获取当前的filter参数 curr_filter = conv_filter[filter_num, :] # 当前filter进行卷积核计算操作 if len(curr_filter.shape) > 2: # 对图片的每个channel进行卷积运算 conv_map = conv_(img[:, :, 0], curr_filter[:, :, 0]) for ch_num in range(1, curr_filter.shape[-1]): conv_map = conv_map + conv_(img[:, :, ch_num], curr_filter[:, :, ch_num]) else: # 只有一个filter的情况 conv_map = conv_(img, curr_filter) feature_maps[:, :, filter_num] = conv_map return feature_maps def pooling(feature_map, size=2, stride=2): """ 最大池化实现 :param feature_map: 特征图 :param size: 池化大小 :param stride: 步长 :return: """ # 1、准备池化层的输出初始化 pool_out = np.zeros((np.uint16((feature_map.shape[0] - size + 1) / stride + 1), np.uint16((feature_map.shape[1] - size + 1) / stride + 1), feature_map.shape[-1])) # 2、循环取出每个方格当中的最大值作为新的输出 for map_num in range(feature_map.shape[-1]): # 获取左上角横初始下标 r2 = 0 for r in np.arange(0, feature_map.shape[0] - size + 1, stride): # 获取左上角纵初始下标 c2 = 0 for c in np.arange(0, feature_map.shape[1] - size + 1, stride): pool_out[r2, c2, map_num] = np.max([feature_map[r:r + size, c:c + size, map_num]]) c2 = c2 + 1 r2 = r2 + 1 return pool_out def relu(feature_map): """ relu激活函数实现 :param feature_map: 输入的特征图 :return: """ # 准备特征输入到relu激活函数 relu_out = np.zeros(feature_map.shape) for map_num in range(feature_map.shape[-1]): for r in np.arange(0, feature_map.shape[0]): for c in np.arange(0, feature_map.shape[1]): relu_out[r, c, map_num] = np.max([feature_map[r, c, map_num], 0]) return relu_outcnn_graph.py import skimage.data import numpy as np from matplotlib import pyplot import cnn def main(): # 1、读取图片数据进行处理 img = skimage.data.chelsea() img = skimage.color.rgb2gray(img) # 2、构建模型CNN,三层CNN,第一层:2个过滤器 第二层:三个过滤器5x5 第三层:1个过滤器7x7 # 第一层: l1_filter = np.zeros((2, 3, 3)) l1_filter[0, :, :] = np.array([[[-1, 0, 1], [-1, 0, 1], [-1, 0, 1]]]) l1_filter[1, :, :] = np.array([[[1, 1, 1], [0, 0, 0], [-1, -1, -1]]]) l1_feature_map = cnn.conv(img, l1_filter) l1_feature_map_relu = cnn.relu(l1_feature_map) l1_feature_map_relu_pool = cnn.pooling(l1_feature_map_relu, 2, 2) # 第一到三层卷积层输出结果显示 fig3, ax3 = pyplot.subplots(nrows=3, ncols=3) ax3[0][0].imshow(l1_feature_map[:, :, 0]).set_cmap("gray") ax3[0][0].get_xaxis().set_ticks([]) ax3[0][0].get_yaxis().set_ticks([]) ax3[0][0].set_title("L1-Map1") ax3[0][1].imshow(l1_feature_map_relu[:, :, 0]).set_cmap("gray") ax3[0][1].get_xaxis().set_ticks([]) ax3[0][1].get_yaxis().set_ticks([]) ax3[0][1].set_title("L1-Map1ReLU") ax3[0][2].imshow(l1_feature_map_relu_pool[:, :, 0]).set_cmap("gray") ax3[0][2].get_xaxis().set_ticks([]) ax3[0][2].get_yaxis().set_ticks([]) ax3[0][2].set_title("L1-Map1ReLUPool") # 第二层 l2_filter = np.random.rand(3, 5, 5, l1_feature_map_relu_pool.shape[-1]) l2_feature_map = cnn.conv(l1_feature_map_relu_pool, l2_filter) l2_feature_map_relu = cnn.relu(l2_feature_map) l2_feature_map_relu_pool = cnn.pooling(l2_feature_map_relu, 2, 2) ax3[1][0].imshow(l2_feature_map[:, :, 0]).set_cmap("gray") ax3[1][0].get_xaxis().set_ticks([]) ax3[1][0].get_yaxis().set_ticks([]) ax3[1][0].set_title("L2-Map1") ax3[1][1].imshow(l2_feature_map_relu[:, :, 0]).set_cmap("gray") ax3[1][1].get_xaxis().set_ticks([]) ax3[1][1].get_yaxis().set_ticks([]) ax3[1][1].set_title("L2-Map1ReLU") ax3[1][2].imshow(l2_feature_map_relu_pool[:, :, 0]).set_cmap("gray") ax3[1][2].get_xaxis().set_ticks([]) ax3[1][2].get_yaxis().set_ticks([]) ax3[1][2].set_title("L2-Map1ReLUPool") # 第三层 l3_filter = np.random.rand(1, 7, 7, l2_feature_map_relu_pool.shape[-1]) l3_feature_map = cnn.conv(l2_feature_map_relu_pool, l3_filter) l3_feature_map_relu = cnn.relu(l3_feature_map) l3_feature_map_relu_pool = cnn.pooling(l3_feature_map_relu, 2, 2) # 3、显示处理之后的特征以及输出图片 # 3、画出输出结果 fig0, ax0 = pyplot.subplots(nrows=1, ncols=1) ax0.imshow(img).set_cmap("gray") ax0.set_title("Input Image") ax0.get_xaxis().set_ticks([]) ax0.get_yaxis().set_ticks([]) pyplot.savefig("in_img.png", bbox_inches="tight") pyplot.close(fig0) ax3[2][0].imshow(l3_feature_map[:, :, 0]).set_cmap("gray") ax3[2][0].get_xaxis().set_ticks([]) ax3[2][0].get_yaxis().set_ticks([]) ax3[2][0].set_title("L3-Map1") ax3[2][1].imshow(l3_feature_map_relu[:, :, 0]).set_cmap("gray") ax3[2][1].get_xaxis().set_ticks([]) ax3[2][1].get_yaxis().set_ticks([]) ax3[2][1].set_title("L3-Map1ReLU") ax3[2][2].imshow(l3_feature_map_relu_pool[:, :, 0]).set_cmap("gray") ax3[2][2].get_xaxis().set_ticks([]) ax3[2][2].get_yaxis().set_ticks([]) ax3[2][2].set_title("L3-Map1ReLUPool") # 第三层卷积层输出结果显示 # fig3, ax3 = pyplot.subplots(nrows=1, ncols=3) # ax3[0].imshow(l3_feature_map[:, :, 0]).set_cmap("gray") # ax3[0].get_xaxis().set_ticks([]) # ax3[0].get_yaxis().set_ticks([]) # ax3[0].set_title("L3-Map1") # # ax3[1].imshow(l3_feature_map_relu[:, :, 0]).set_cmap("gray") # ax3[1].get_xaxis().set_ticks([]) # ax3[1].get_yaxis().set_ticks([]) # ax3[1].set_title("L3-Map1ReLU") # # ax3[2].imshow(l3_feature_map_relu_pool[:, :, 0]).set_cmap("gray") # ax3[2].get_xaxis().set_ticks([]) # ax3[2].get_yaxis().set_ticks([]) # ax3[2].set_title("L3-Map1ReLUPool") pyplot.savefig("L3.png", bbox_inches="tight") pyplot.close(fig3) if __name__ == '__main__': main()
|






















【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |