搅拌子磁悬浮悬浮原理及动态平衡实验探究 |
您所在的位置:网站首页 › 粘稠液体搅拌机原理图解 › 搅拌子磁悬浮悬浮原理及动态平衡实验探究 |
搅拌子磁悬浮悬浮原理及动态平衡实验探究
|
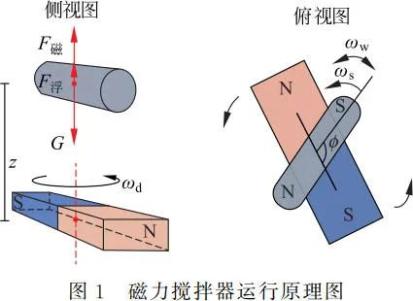
原创 余志涛 周杰 等 物理与工程 摘 要 在某些特定情况下,磁力搅拌器的“搅拌子”在搅拌时,能在黏性流体中出现稳定上升和悬浮的情况。基于此现象,该文设计了一系列实验探究“搅拌子”动态稳定的原理以及相关影响因子的影响机制。对于磁悬浮原理方面,主要通过观测悬浮过程中 6 个阶段搅拌子的自旋转情况,并建立流体内圆柱体旋转模型进行分析,得到搅拌子动态悬浮过程中的受力情况。对于影响因子方面,该文从黏性流体、搅拌子形状及规格等方面入手,通过实验观测各条件下搅拌子的最小悬浮角速度,反映出各因子的影响机制,并验证了圆柱体旋转模型的合理性。最终得到在本实验中 8.0mm×45.0mm 的棱柱形搅拌子在 26.0℃ 纯甘油(946.00 泊)中维持磁悬浮所需搅拌磁棒转速最小,ωup 为 171.5r/min、ωdown 为 262.0r/min。该实验探究成果为旋转式磁悬浮在水中升降机的应用提供了一定的参考。 关键词 黏性流体;磁悬浮;动态稳定 Abstract Under certain circumstances, the “agitator” of the magnetic agitator can rise and suspend stably in the viscous fluid when agitating. Based on this phenomenon, a series of experiments were designed to explore the dynamic stability principle of agitator and the influence mechanism of related influencing factors. As for the principle of magnetic suspension, the self-rotation of agitator in six stages in the suspension process was observed, and the rotation model of the cylinder in the fluid was established for analysis, so as to obtain the force of the agitator in the dynamic suspension process. As for the influence factors, starting from the aspects of viscous fluid, agitator shape and specification, this paper experimentally observed the minimum suspension angular velocity of agitator under various conditions, reflected the influence mechanism of each factor, and verified the rationality of cylinder rotation model. Finally, in this experiment, the prismatic stirrer of 8.0mm×45.0mm needs the minimum rotating speed of the stirring magnetic rod to maintain magnetic levitation in pure glycerol (946.00g·cm-1·s-1) at 26.0℃, where ωup is 171.5r/min, ωdown is 262.0r/min. The experimental research results provide a certain reference for the application of rotary magnetic levitation in underwater elevator. 磁力搅拌器是实验室中常见的溶液混合仪器。在用于搅拌黏性液体时,若将转速调得过大,则会出现“跳子”现象,即搅拌子突然与容器底部脱离并进入液体中部。本文认为使该搅拌子脱离容器底部的力主要是搅拌子与搅拌器内部驱动磁体在竖直方向上产生的磁力。通过实验观察搅拌子在黏性流体中磁悬浮状态下所受各力的动态平衡及各参数的影响情况,探究如何控制由两个相对旋转的磁体产生的非接触定向磁力。同时本文将该系统出现的磁悬浮现象与其他磁悬浮现象(如磁悬浮陀螺)相比较,发现该系统中黏性流体磁悬浮动态平衡更容易达到。本文在前人磁悬浮理论基础上,进一步验证了该系统中的扭矩平衡,并定量得出了系统在不同参数影响下达到磁悬浮状态所需的条件。 1 磁悬浮系统组成及运行原理 在该搅拌子磁悬浮系统中,搅拌子在竖直方向受自身重力、排开黏性液体产生的浮力及搅拌子与驱动磁体间产生的周期磁场力。三者在竖直方向上达到了动态平衡,从而出现搅拌子在黏性流体中旋转悬浮的现象。 1.1 磁力搅拌器原理 1) 磁力搅拌器组成 磁力搅拌器[1]最简单的形式是由两个旋转的条形磁铁组成,如图 1 所示。一个是由电动马达驱动的“驱动”磁铁,另一个是浸没在流体中的搅拌棒。磁力搅拌器利用磁性物质异性相吸、同性相斥原理,通过底座驱动搅拌棒两端极性的变更带动搅拌子做圆周运动。
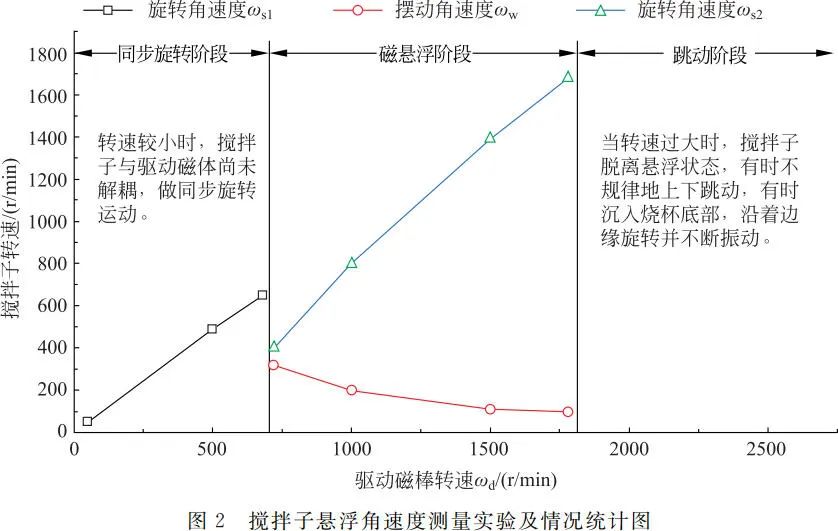
2) 磁力搅拌器运行过程分析 磁力搅拌器底座两端极性变更造成的影响看作底部有一条形磁体在自行旋转,并称其为驱动磁体。假设驱动磁体角速度为 ωd,搅拌子旋转角速度为 ωs,摆动角速度为 ωw(单位:rad/min)。 静止时,底部驱动磁体与搅拌子之间的相位角为 π。随着驱动磁条速度的增加,搅拌子先绕着垂直于驱动磁体长轴旋转,与其同步。当驱动磁体速度继续增加时,搅拌子受到与其运动方向相反的黏性扭矩作用,相位角逐渐增大。当达到 π/2 时,垂直方向上的磁力由吸引力成为排斥力,使其逐渐拥有了足以实现“跳子”和“悬浮”的磁场力。 1.2 恩绍(Earnshawn)定理 在电偶极动态稳定的状况下,磁悬浮是可以实现的。比如:磁悬浮列车(主动反馈调节)[2]、悬浮旋转(由陀螺力提供稳定性[3])、使用由强大的电磁铁产生的高场(即电子的轨道运动对外加磁场的响应),以及磁阿基米德效应[4]。 可以认为在搅拌子悬浮系统中,搅拌子与驱动搅拌棒两个磁体之间的相位角呈周期性变化,达到了某种电偶极动态稳定的状态,从而产生了较稳定的竖直向上作用于搅拌子的磁斥力。这个磁斥力、搅拌子的重力及浮力达到动态平衡,出现搅拌子磁悬浮现象。 2 搅拌子运动情况分析 2.1 相位角与角速度的变化情况 通过改变驱动搅拌棒的转速得到相对应的搅拌子角速度与振动幅度变化情况,如图 2 所示。利用观测到的搅拌子的旋转角速度与摇摆角速度表示相位角随时间的变化情况[5] 其中 为搅拌子相位角(单位:rad),A 为搅拌子悬浮摇摆的振幅(单位:rad),t 为时间(min)。
2.2 圆柱体旋转模型 建立物理模型辅助分析,搅拌子在水平方向上的旋转过程与受力情况。考虑到所使用的搅拌子的形状接近于圆柱体,因此用被无限拉长的椭球体的中部一节来近似所需要的圆柱体模型。再利用长形椭球体拖曳系数对各力扭矩计算得出以下式子[6] 其中 为搅拌子旋转角位移公式, 为搅拌子摇摆角位移公式。I 为搅拌子转动惯量,因为模型为圆柱体,所以 。而 D = 8πγKηl 3,是长形椭球体拖曳系数,其中 γ 是搅拌子靠近烧杯底部增加的阻力;K 是几何因数,在该圆柱体模型中为 0.212;l 是搅拌子(圆柱体)长轴长度的一半;η 是动力黏度,由流体种类及浓度所决定。M ( z ) = μ0 · md · mf / ( 4πz 3 ),其中 μ0 为磁常数,4π×10-7Tm / A;md 为驱动磁体磁矩;mf 为搅拌子磁矩;z 为两磁体距离。 3 实验设计及成果 3.1 预实验成果及实验设计思路 在搅拌子磁悬浮的预实验中,本研究将搅拌子放入含有黏性流体的烧杯中,使用搅拌器对其作用,观察到了以下现象,并按搅拌子运动情况分为了六个阶段: (1) 搅拌器的驱动搅拌棒与静止于烧杯中心的磁搅拌子呈反向重合,即从上垂直向下观察,两物体轴线在同一直线上,搅拌棒的“N”极与搅拌子的“S”极指向同一方向,两物体相对静止。 (2) 随着驱动搅拌棒加速旋转,搅拌子在搅拌棒的磁力作用下也开始加速旋转,两物体同步旋转,几乎相对静止。 (3) 继续使驱动搅拌棒加速,当到达某一个转速时,竖直方向的磁力使搅拌子突然脱离烧杯底部,出现“跳子”现象,让搅拌子进入了黏性流体中部。 (4) 稳定好驱动搅拌棒转速后,观察到搅拌子悬浮于黏性流体中,在竖直方向上从上往下观察,搅拌子在黏性流体中做复式旋转运动。先向驱动搅拌棒旋转方向转动一定弧度后,又向相反方向转动较小弧度,接着向搅拌棒旋转方向继续转动,如此反复摇摆;在水平方向观察,可见搅拌子在黏性流体中上下浮动。 (5) 继续增加转速,搅拌子摇摆的幅度和角速度逐渐减小,悬浮的高度也渐渐降低。 (6) 逐渐减小转速,当转速到达某个值时,搅拌子悬浮状态突然解除,回到了烧杯底部中央,与驱动搅拌棒做同步旋转运动。 在该体系中,搅拌子悬浮的动态稳定在竖直方向上主要由搅拌子的重力、在黏性流体中的浮力与由两个磁体产生的磁斥力所维持。其中,搅拌子的重力由搅拌子自身重量以及重力加速度决定,浮力由搅拌子的体积以及流体的密度决定,而磁力的大小和方向由两个磁体在相对旋转运动过程中产生的相位角变化情况所决定。 本文从以上分析中得到了探究搅拌子磁悬浮动态平衡的研究变量:1)搅拌子的形状及大小:影响重量及搅拌子体积。2)黏性流体的密度及粘度:影响浮力及相位角变化情况。3)驱动搅拌棒、搅拌子的转速:反映相位角的变化情况。 3.2 实验设计 根据以上理论分析,本文通过改变影响因子中的部分参数并观察记录搅拌子磁悬浮情况,定性地探究这些影响因子对磁悬浮动态平衡产生怎样的影响。基于可使用的实验器材与实验环境,本文选择了易于控制和改变的实验参数以及便于观察测量的实验现象。 1) 实验数据与记录对象 在之前的预实验中,ωup(搅拌子由同步旋转状态变为悬浮状态的搅拌器最小转速所对应角速度)与 ωdown(搅拌子由悬浮状态变为同步旋转状态的搅拌器最小转速所对应角速度)在实验过程中可在突变现象发生时对搅拌器转速显示器读数得到。因此,本文通过观察记录在不同条件下这两个角速度的变化情况,便可得出各影响因子对该动态平衡有着怎样的影响。 2) 实验器材 多种类型搅拌子(如图3):
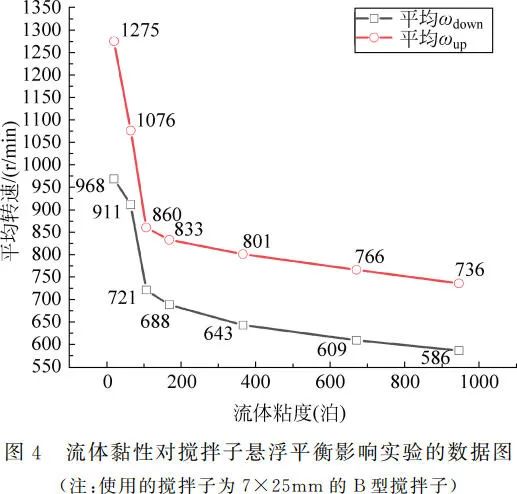
其中 A 型搅拌子见图 3(a),其参数为:10.0mm×20.0mm,13.0mm×35.0mm,16.0mm×40.0mm;B 型搅拌子见图 3(b),其参数为:6.0mm×15.0mm,6.0mm×20.0mm,7.0mm×25.0mm,8.0mm×30.0mm,8.0mm×35.0mm,8.0mm×40.0mm,8.0mm×45.0mm,8.0mm×50.0mm;C 型搅拌子见图 3(c),其参数为6.0mm×20.0mm,8.0mm×30.0mm,8.0mm×40.0mm;十字形搅拌子和圆柱形搅拌子见图 3(d),其参数分别为15.0mm×15.0mm、14.0mm×40.0mm。 其他实验器材及用品: 磁力搅拌器、各规格烧杯、温度计、甘油(丙三醇)、清水、直尺等。 3.3 实验成果 1) 流体黏性对于搅拌子悬浮平衡的影响 由图 4 可以得出:在较低黏性的液体中,搅拌子常出现跳子,很难达到悬浮,随液体粘度升高,搅拌子更容易于出现悬浮现象;在较高黏性的液体中,黏性越高,最大悬浮角速度和最小悬浮角速度均下降,即更有利于悬浮现象的出现。
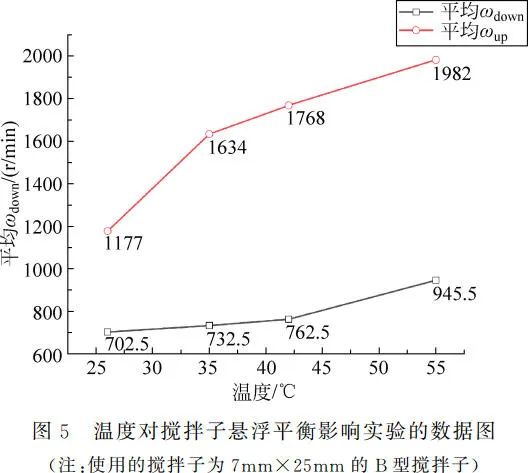
2) 温度对于搅拌子悬浮平衡的影响 由图 5 可以看到随着温度升高,ωup 与 ωdown 也不断上升。分析其原因,可能是在高温下黏性液体动力粘度 η 降低,该系统需要更大的转速才能达到悬浮扭矩平衡。
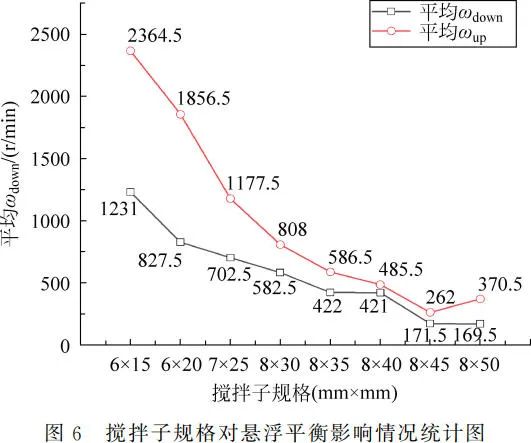
3) 搅拌子规格对于搅拌子悬浮平衡的影响 从图 6 中可以得到初步结论,在采用同种形状的 B 型搅拌子时,随着使用的搅拌子的横截面积与长度的增加,该系统中的 ωup 与 ωdown 整体上呈减小趋势。
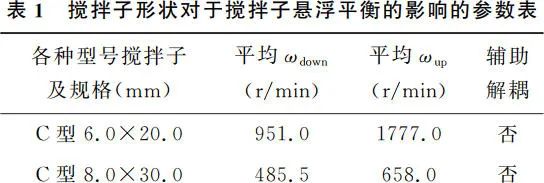
另外,本文观察到当搅拌子规格过大时,ωup 的数值出现上浮,进入悬浮状态所需的最小角速度变大。分析是当搅拌子规格增加时,搅拌子自身的重量增加、杯壁处的流体运动对搅拌子的旋转运动影响变大。当规格超过某个值时,搅拌子与驱动磁体间磁力变化产生的影响不及受到杯壁流体与重力作用变化产生的影响大,从而出现了 ωup 数值上浮的现象。 4) 搅拌子形状对于悬浮平衡的影响 此外,对于不同搅拌子本文还分别在圆底烧瓶和平底烧杯中进行了测试。但烧杯实验结果无法定量描述,只得到了搅拌子型号方面的初步结论。由表 1 可以看出搅拌子的形状和规格对悬浮的动态稳定有显著的影响。
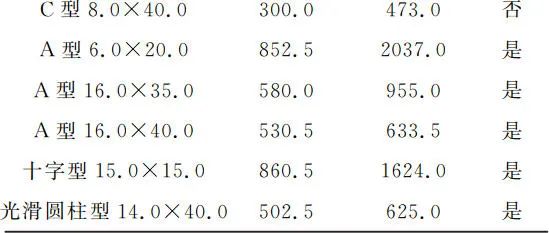
3.4 类比实验 为了进一步证明在该搅拌子磁悬浮系统中,提供磁悬浮条件的主要是系统中两个相对旋转磁体产生的磁场力,本文设计了一个类比实验,即磁悬浮陀螺实验。 如图 7 所示,两个相对旋转的磁体在满足某个相对角速度条件时便会产生定向的磁场力,当磁场力足够大时便可以出现“磁悬浮”现象。由于该磁场力不需要进行直接接触,且磁场力的方向可以由两磁体的位置关系改变,因此该悬浮原理可以应用在任何需要可控的无接触作用力的领域。(如磁悬浮运输、创造物理实验中无摩擦环境等)
另外,在该磁悬浮陀螺系统中,磁悬浮平衡十分不稳定,且与搅拌子磁悬浮系统相比,极难出现磁悬浮现象,可见流体的存在让悬浮状态更容易达到、也更加稳定。 4 结语 4.1 实验结论 最后,对实验结果总结可得到以下几点结论: (1) 在粘度为 19.53 泊至 946.00 泊(100% 甘油)的范围内,较低黏性的流体中,搅拌子常出现跳子,很难达到悬浮。随着液体粘度升高,搅拌子更容易出现悬浮现象。在较高黏性的液体中,黏性越高,最大悬浮角速度和最小悬浮角速度均下降,即更有利于悬浮现象的出现。此时再看推导公式(2),改变黏性参数也就是改变了 D = 8πγKηl 3 中的 η 值。流体粘度越高,η 值越大,使得 D 值也越大,更容易达到平衡。 (2) 在其他条件相同的情况下,温度在 26.0℃ 至 55.0℃ 范围内升高,将使 ωup 与 ωdown 上升。其原因可能是高温下黏性液体粘度降低,悬浮更难维持。 (3) 对于同形状的搅拌子,搅拌子的规格在 6.0mm×15.0mm2 至 8.0mm×45.0mm 的范围内越大,越利于悬浮现象的出现。此处长轴对应式子 D = 8πγKηl 3 中的 l,而横截半径对应了式子 中的 r。因此两参数值越大,式(2)的平衡更容易到达。 (4) 搅拌子的形状与容器的结构、大小也对悬浮的动态稳定有一定的影响。其中,带环状的棱柱型(B型)搅拌子对悬浮动态平衡最有益。 4.2 误差分析 (1) 由于市场上的磁力搅拌器为保证安全,采取措施以防止搅拌子跳动。实验中为使搅拌子进入悬浮状态进行了辅助解耦,增加了所得数据的不稳定性。 (2) 由于使用的磁力搅拌器无自带加热系统,在探究温度影响情况实验过程中,流体温度会不断下降,而不是保持在一个定值,这对本文的实验数据造成了一定的影响。 4.3 展望 通过大量实验探究,本文证明了理论推导中各公式的合理性,并且发现了各种影响因子对磁悬浮动态平衡产生的影响。若能得到更好的实验器材,设计更完善的实验并得到更多的实验数据,就能对该平衡状态做更量化的分析,甚至能够通过人为控制参数来得到定向悬浮磁场力,并将其运用在更广阔的行业中。 另外,搅拌子磁悬浮系统中黏性流体让磁悬浮更加稳定,有着良好的“维稳”作用。因此,还可以在“维稳”流体方面进行深一步的研究。利用流体力测量仪器,充分分析“维稳”向心反作用力的起源,并运用于流体力学研究领域中。 参考文献 [1]郭雷. 磁力搅拌器: 中国, CN200930203166. 3[P]. 2009-08-17. [2]张士臣, 曹泽乾, 任坤华. EMS 磁悬浮列车悬浮控制仿真研究[J]. 现代制造技术与装备, 2020, 56(7): 15-19. ZHANG S C, CAO Z Q, REN K H. Simulation research on suspension control of EMS maglev train[J]. Modern manufacturing technology and equipment, 2020, 56(7): 15-19. (in Chinese) [3]BERRY M V. The LevitronTM: An adiabatic trap for spins[J]. Proceedings Mathematical Physical & Engineering Sciences, 1996, 452(1948): 1207-1220. [4]MIRICA K A, SHEVKOPLYAS S S, PHILLIPS S T, et al. Measuring de-nsities of solids and liquids using magnetic levitation: Fundamentals[J]. Journal of the American Chemical Society, 2009, 131(29): 10049-10058. [5]BALDWIN K A, DE FOUCHIER J B, ATKINSON P S, et al. Magnetic Levitation Stabilized by Streaming Fluid Flows[J]. Physical Review Letters, 2018, 121(6): 064502.1-064502.5. [6]于向阳, 姚凌虹, 孟庆昌, 等. 椭球体定常流动粘性流场和水动力计算方法研究[J]. 舰船电子工程, 2019, 39(7): 187-193. YU X Y, YAO L H, MENG Q C, et al. Research on viscous flow field and hydrodynamic calculation method of ellipsoid steady flow[J]. Ship Electronic Engineering, 2019, 39(7): 187-193. (in Chinese) 基金项目: 2020年高等学校教学研究立项项目“新工科背景下的大学物理课程体系重构与教学模式创新”(编号:DJZW202008hb);中国地质大学(北京)大学生创新创业训练计划项目(编号:202011415727)。 通讯作者: 李庚伟,男,中国地质大学(北京)副教授,主要从事物理教学与研究工作,[email protected]。 引文格式: 余志涛, 周杰, 李庚伟. 搅拌子磁悬浮悬浮原理及动态平衡实验探究[J]. 物理与工程, 2022, 32(1): 120-125. Cite this article: YU Z T, ZHOU J, LI G W. Research on suspension principle and dynamic equilibrium experiment of agitator maglev[J]. Physics and Engineering, 2022, 32(1): 120-125. (in Chinese) END
更多精彩文章请点击下面“蓝字”标题查看: 对麦克斯韦方程组拓展的评论王青教授:深入理解“拓展的麦克斯韦方程组”——2.0版王青教授:理解王中林院士“拓展的麦克斯韦方程组”“碰瓷”麦克斯韦:伽利略协变和洛伦兹协变电磁场论趣谈热点:运动介质洛伦兹协变电磁理论2021年《物理与工程》优秀论文、优秀审稿专家、优秀青年学者名单王青教授:源自苏格拉底的问题驱动式教育——在互动中共同学习和成长读后感:教育中的现实和远方王青教授:昨晚(6月9日),清华电动力学期末考试朱邦芬院士:“减负”误区及我国科学教育面临的挑战《物理与工程》2021年第6期目录乐永康:新冠肺炎疫情防控下美国物理实验教学及中美情况对比顾牡:对于重新制定的《非物理类理工学科大学物理课程教学基本要求》的认识和体会朱邦芬院士:从基础科学班到清华学堂物理班朱邦芬院士:对培养一流拔尖创新人才的思考李学潜教授:物理是一种文化李学潜教授:如何帮助物理系学生迈过从高三到大一这个坎穆良柱:物理课程思政教育的核心是科学认知能力培养穆良柱:什么是物理及物理文化?穆良柱:什么是ETA物理认知模型穆良柱:什么是ETA物理教学法吴国祯教授:我的国外研究生经历印象——应清华大学物理系“基科班20年·学堂班10年纪念活动”而写 陈佳洱,赵凯华,王殖东:面向21世纪,急待重建我国的工科物理教育王亚愚教授:清华物理系本科人才培养理念与实践葛惟昆教授:关于中外人才培养的几点思考安宇教授:为什么传统的课堂讲授模式需要改变安宇教授:其实教学就是积累的过程刘玉鑫教授:关于本科生物理基础课程教学和教材编著的一些思考沈乾若:重创理科教育的美加课程改革Henderson C:美国研究基金支持下的物理教育研究及其对高等物理教育的影响《物理与工程》期刊是专注于物理教育教学研究的学术期刊,是中国科技核心期刊,1981年创刊,欢迎踊跃投稿,期刊投审稿采编平台: http://gkwl.cbpt.cnki.net 欢迎关注 《物理与工程》微信公众号 原标题:《搅拌子磁悬浮悬浮原理及动态平衡实验探究》 |


【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |