六足机器人的步态分析与实现 |
您所在的位置:网站首页 › 步态是指 › 六足机器人的步态分析与实现 |
六足机器人的步态分析与实现
|
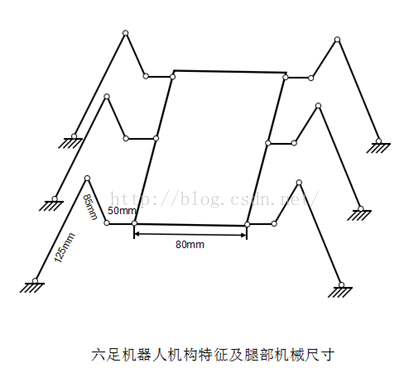
1、六足机器人步态的定义 步态:是指机器人的每条腿按一定的顺序和轨迹的运动过程,正是因为这一运动过程实现了机器人的步行运动。 步态周期:步态周期是指多足机器人完成一个步态所需的时间,也就是所有腿轮番完成一次“提起-摆动-放下”的动作所花费的时间,在此过程中机器人机体也完成过渡过程。本系统的步态周期参数可调,经过实际测试,最小步态周期是300ms,这个参数受限于舵机的性能。 占地系数:占地系数是指每条腿接触地面的时间和整个步态周期的比值。当占地系数等于0.5时,机器人是用两组腿交替摆动,这种步态称为小跑步态;当占地系数小于0.5时,机器人任何瞬间只有不足三条腿支撑地面,称为跳跃步态,当占地系数大于0.5时,机器人轮番有三条腿以上支撑地面,这种步态俗称慢爬行步态。 步幅:机器人的重心在一个步态周期中的平移为步幅。 静态稳定性:步态的生成策略则取决于机器人的步行稳定性,即在步态生成时必须进行稳定性分析。对于多足机器人,在任何时候都要有足够多的腿立足于地面支撑机器人机体,才能确保它静态稳定地步行。通常,至少需要三条这样的腿,并且由这三条腿的立足点构成的三角形必须包围机器人的重心垂直投影,机器人步行时,虽然这个三角形区域是不停变化的,但只要机器人重心投影始终在这个交替变化的区域内,则机器人的步行就是稳定的(所谓的ZMP判据呵呵)。 2、运动学分析机械结构分析如图1. 后续文章会继续跟大家分析运动学,这是步态生成的基础。如有错误,请大家指正。
|
 根据Grubler公式,机器人机体的运动自由度f0=a(n-j-1) + ∑fi,其中n代表连杆数,j代表关节数,fi代表第i个关节的自由度数,a=6代表运动参数。机器人与地面的接触点可看为球关节,其余关节为旋转关节。所以运动自由度。因此任何时候机器人的机动性不仅包括三维平动还包括三维转动。四轴飞行器的空间自由度也可由此公式导出,只是四轴飞行器只有四个驱动输入,属于欠驱动系统,但六足机器人是冗余驱动。但它与六足机器人一样,姿态都是强耦合的。
根据Grubler公式,机器人机体的运动自由度f0=a(n-j-1) + ∑fi,其中n代表连杆数,j代表关节数,fi代表第i个关节的自由度数,a=6代表运动参数。机器人与地面的接触点可看为球关节,其余关节为旋转关节。所以运动自由度。因此任何时候机器人的机动性不仅包括三维平动还包括三维转动。四轴飞行器的空间自由度也可由此公式导出,只是四轴飞行器只有四个驱动输入,属于欠驱动系统,但六足机器人是冗余驱动。但它与六足机器人一样,姿态都是强耦合的。【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |