仿人型手腕 6R机械臂 D |
您所在的位置:网站首页 › 机器臂的意思 › 仿人型手腕 6R机械臂 D |
仿人型手腕 6R机械臂 D
|
计算正向运动学通常需要使用D-H参数法对机械臂建模。 第一步: 绘制机械臂模型图可用手绘机械臂结构简图或者模型图,使用圆柱体代表转动关节和线表示的连杆,当写论文的时候,可以使用PPT或者CAD来绘图,ppt里面提供了很多现成的线条形状,通过组合功能可以设计出很nice的结构,用来画简图绰绰有余。百度搜索运动学图表或者google搜索kinematic diagram来获取些许参考。
 第二步: 找出你的坐标轴
第二步: 找出你的坐标轴
完成结构简图的绘制之后, 通过D-H参数法为每运动关节分配坐标轴。如果轴分配准确,之后的工作就比较容易。这些轴是计算参数模拟器,逆运动学求解器的基础。从油管上下载的视频可供参考:https://www.youtube.com/watch?v=rA9tm0gTln8 视频讲解的还是比较清楚的,这里就当笔记记下来了。 Z-axis — Z 轴ー The z-axis should lie on the axis of rotation for a revolute joint or axis of extension for a prismatic joint. Z 轴就是关节的旋转轴或滑动关节的移动方向X-axis — X 轴ー The x-axis should lie along the "common normal", which is the shortest orthogonal line between the previous z-axis and the current z-axis 当前关节的Z轴和前一关节Z轴的公共垂线,是最短的正交线Y-axis — Y 轴ー Once you've calculated the other two, this axis should fall into place by following the "right hand rule" (see below)第三个轴根据右手定则即可确定通过Z轴和X轴的确定,就确定了坐标系的位置,因此除了第一个坐标系的建立是通过指定x轴,其余坐标系都是根据上个坐标系Z轴确定的,所以坐标系原点可能出现在很奇怪的位置(视频中提到的)一般情况使用三种颜色绘制坐标轴: z 轴(蓝色)、 x 轴(红色)和 y 轴(绿色)。 这也是 ROS 的 RViz 可视化工具中使用的着色方案。 第三步: 末端执行器坐标系计算正向运动学的目的是能够从关节的位置计算末端执行器的姿态。因此在制定运动学模型时,最好也应该仔细考虑末端执行器的坐标系建立。 第四步: 计算 D-H 参数Dh 参数将机器人的每个关节分解成四个参数,每个参数都与之前的关节相关。 d - the distance between the previous x-axis and the current x-axis, along the previous z-axis. - 前一个 x 轴与当前 x 轴之间的距离,沿前一个 z 轴θ - the angle around the z-axis between the previous x-axis and the current x-axis. - 先前的 x 轴和当前的 x 轴之间围绕 z 轴的角度a - the length of the common normal, which is the distance between the previous z-axis and the current z-axis - 公共垂线的长度,即前 z 轴与当前 z 轴之间的距离α - the angle around the common normal to between the previous z-axis and current z-axis. - 公垂线与前 z 轴和当前 z 轴之间的夹角其中θ和α 的方向如图所示:
D-H 方法是最常见的正向运动学方法,它的缺点之一是不能很好地处理平行的 z 轴。 有各种各样的选择,包括螺旋理论表示,Hayati-Roberts,和其他几何模型。这些可能(也可能不是)是更好的方法。大多数运动学库都是能接受 D-H 参数的。 第四步: 实例
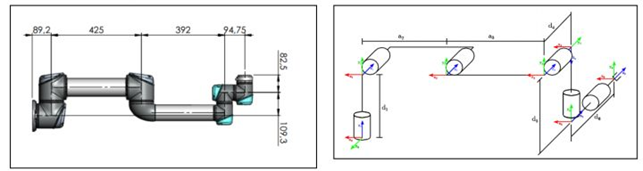
对于UR的根据D-H参数逆解的步骤可以参考https://www.zhihu.com/question/47605775/answer/113477680?from=profile_answer_card 第五步: Inverse kinematic运动学逆解本次设计的机械臂是6R仿人型手臂 Anthropomorphic arm with spherical wrist,和PUMA不太一样的是,参数d=0,如图:
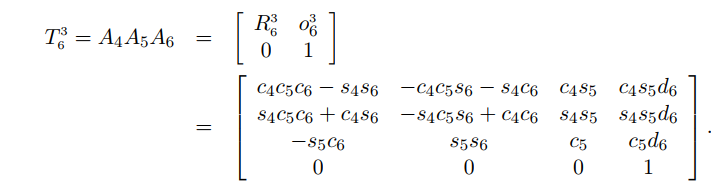
左图中第一个关节和第二个关节之间是有一个偏置的,而我设计的机械臂是右边这种没有偏置的,它们末端的三个自由度都是一样的,相较于一点,因此这两种结构的逆解还是比较相似的。先看末端三个自由度的D-H 参数,两种结构是一样的: 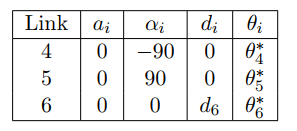 
通过解方程式的方式很难直接以封闭形式求解,大多数机器人手臂就是这种情况。 因此,我们需要利用系统的运动学结构的进行分析。 而正向运动学问题始终具有独特的解决方案,可以通过评估正向方程,逆运动学问题简单地获得可能有解决方案,也可能没有解决方案。 即使存在解决方案,它也可能是唯一的,也可能不是唯一的。
|











【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |