机器人控制的基本方法 |
您所在的位置:网站首页 › 机器人运动速度的控制方式是什么 › 机器人控制的基本方法 |
机器人控制的基本方法
|
机器人的控制方法根据控制量分类
按照控制量所处空间的不同,机器人控制可以分为关节空间的控制和笛卡尔空间的控制。对于串联式多关节机器人,关节空间的控制是针对机器人各个关节的变量进行的控制,笛卡尔空间控制是针对机器人末端的变量进行的控制。按照控制量的不同,机器人控制可以分为:位置控制、速度控制、加速度控制、力控制、力位混合控制和振动控制等。这些控制可以是关节空间的控制,也可以是末端笛卡尔空间的控制 位置控制 目标是使被控机器人的关节或末端达到期望的位置。下面以关节空间位置控制为例,说明机器人的位置控制。如图1-1所示,关节位置给定值与当前值比较得到的误差作为位置控制器的输入量,经过位置控制器的运算后,其输出作为关节速度控制的给定值。关节位置控制器常采用PID算法,也可以采用模糊控制算法。 加速度控制 |
 速度控制 在图1-1中,去掉位置外环,即为机器人的关节速度控制框图。通常,在目标跟踪任务中,采用机器人的速度控制。此外,对于机器人末端笛卡尔空间的位置、速度控制,其基本原理与关节空间的位置和速度控制类似
速度控制 在图1-1中,去掉位置外环,即为机器人的关节速度控制框图。通常,在目标跟踪任务中,采用机器人的速度控制。此外,对于机器人末端笛卡尔空间的位置、速度控制,其基本原理与关节空间的位置和速度控制类似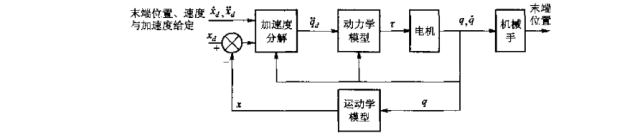 图1-2所示为分解加速度运动控制示意图。首先,计算出末端工具的控制加速度。然后,根据末端的位置,速度和加速度期望值,以
图1-2所示为分解加速度运动控制示意图。首先,计算出末端工具的控制加速度。然后,根据末端的位置,速度和加速度期望值,以【本文地址】
公司简介
联系我们
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |