【机器人】正运动学,如何建立机器人各连杆坐标系和D |
您所在的位置:网站首页 › 机器人运动范围图怎么看 › 【机器人】正运动学,如何建立机器人各连杆坐标系和D |
【机器人】正运动学,如何建立机器人各连杆坐标系和D
|
/* *参考资料:《机器人学导论 Introduction to Robotics Mechanics and Control》——(美)John J.Craig等 */ 注意:不管是Standard DH法还是Modified DH法,下面这些知识都是共同的基础。 一、先介绍几个简单的专业术语 1、 Link0:地杆。 Link1:和地杆相连,第一个可动的杆件。 Link2:第二个可动的杆件。 … Linkn:第n个可动的杆件。 如图1所示:  图2 图2
二、D-H表的四个参数 a(i-1):轴(i-1)和轴i之间的距离,即公垂线。 α(i-1):轴(i-1)和轴i之间的夹角。 di:a(i-1)与a(i)的距离。 θ :a(i-1)与a(i)的夹角。 三、连杆坐标系X、Y、Z轴方向的确立 通过标题二的概念,可以确定各坐标系的主轴方向: Zi : 转动或移动轴的方向。逆时针为正。 Xi : 当ai≠0时,Xi沿着ai方向; 当ai=0时,Xi与Zi、Zi+1两者垂直; Yi : 与Zi、 Xi相互垂直,右手定则。 原点:Zi 与ai的交点。 下面我们以Modified DH法来讲解如何建立坐标系和DH参数表 : 有两个连杆比较特殊,所以单独说一下: 1.地杆Link0:我们将地杆的坐标系与Link1的坐标系建成一样,重合。则总有a0=0,α0=0。 2.最后一个杆件Linkn:其坐标系的Xn取和X(n-1)同方向。 通过坐标系可以更简单的确定DH的四个参数: a(i-1):沿着X(i-1)方向,Z(i-1)和Zi间的距离。 α(i-1):以X(i-1)方向看,Z(i-1)和Zi间的夹角。 di:沿着Zi方向,X(i-1)和Xi间的距离。 θ :以Zi方向看,X(i-1)和Xi间的夹角。 四、以书中一个例子为例,建立坐标系 五、根据上述所建立的坐标系写出DH参数表 根据DH表,可以知道T01、T12、T23(由于这个编辑器没法写上下标,这样替代一下0是左上标,1是左下标); 继而可以算出T03。 我们发现里面并没有L3这个位置信息,因为我们算出的T03只是姿态,所有还有加上最后一个连杆的位置P3={L3,0,0}。 |
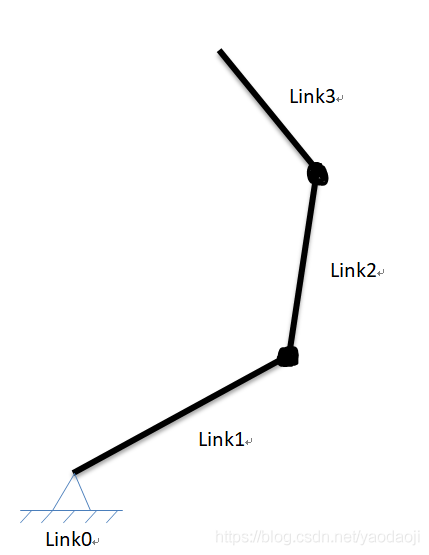 图1
图1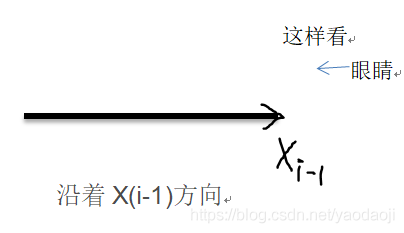 图3
图3 注意:坐标系可能不止一种建法,比如Z1的方向可以选择垂直纸面向上,也可以垂直纸面向里,都是正确的。
注意:坐标系可能不止一种建法,比如Z1的方向可以选择垂直纸面向上,也可以垂直纸面向里,都是正确的。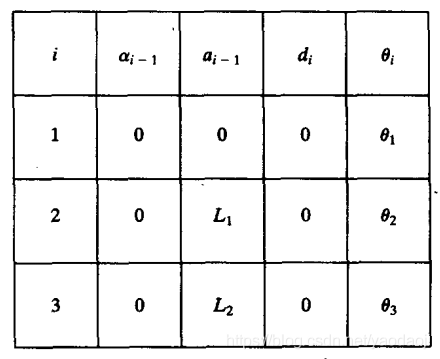 六、机器人正运动学
六、机器人正运动学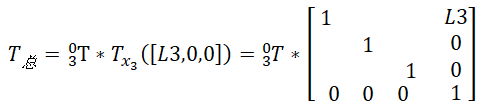
【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |