水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+说明书+开题报告+任务书】 |
您所在的位置:网站首页 › 机器人结构图及工作原理 › 水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+说明书+开题报告+任务书】 |
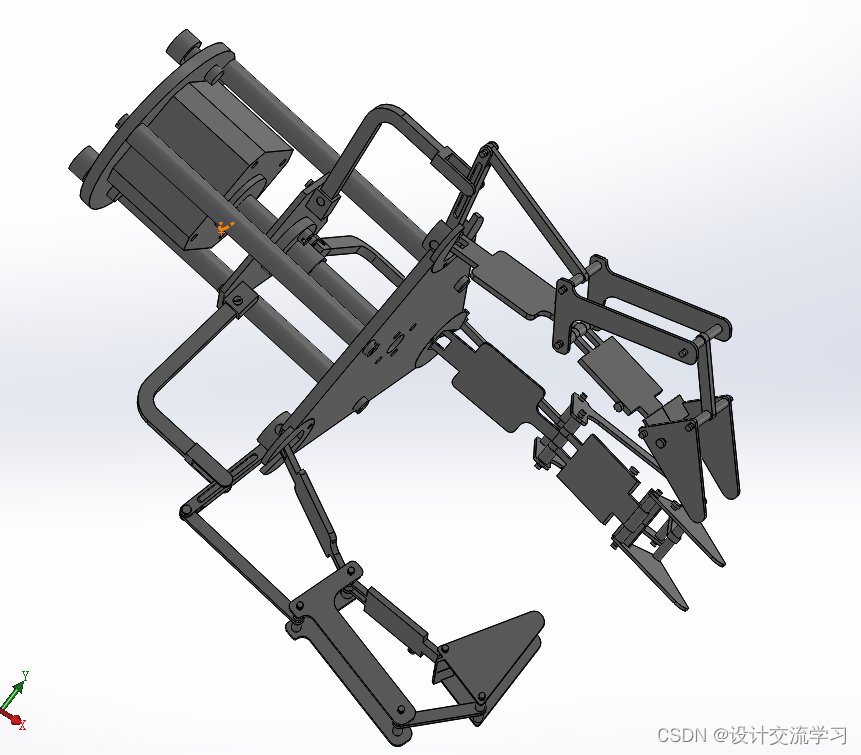
水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+说明书+开题报告+任务书】
|
摘要 水果采摘是农业生产中最费时费力的一环,其需要大量的劳动力和高强度的工作。但由于工业生产的迅速发展大量分流了农业劳动力以及人口老龄化加剧等原因,使得能够从事农业生产的劳动力越来越少,单靠人工劳动已经不能满足现有的需求。随着计算机图像技术和各种智能控制理论的发展,使得机器人采摘水果成为可能。 本文基于现有的技术和理论以水果采摘机器人的末端执行器与多自由度手臂为研究对象,采用步进电机作为动力源,设计一个6自由度的水果采摘机器手,进行机械手的结构分析和水果采摘分析,并进行solidworks的三维结构建模,为今后水果采摘机器人的设计提供结构参考。 关键词 水果采摘,末端执行器,多自由度 Abstract Fruit picking is one of the most time-consuming in agricultural production, which requires a large amount of labor and high intensity work. Because of the rapid development of industrial production of large diversion of agricultural labor and the increase of population aging and other reasons, makes it possible to engage in agricultural production labor is less and less, only by manual labor has been unable to meet the existing requirements. With the development of computer image technology and intelligent control theory, the fruit picking robot is possible. In this paper, based on existing technique and theory at the end of the fruit picking robot actuators with multiple degrees of freedom arm as the research object, adopts a stepping motor as the power source, the design of a 6 degree of freedom of the fruit picking robot, structure analysis and mechanical hand for picking fruit analysis, three-dimensional structure modeling and SolidWorks, provides the structure the reference for the design of future fruit picking robot. Key Works fruit picking, end-effectors, multiple degrees of freedom
目 录 摘要 Abstract 1.绪论 1.1项目研究意义 1.2研究现状 1.2.1美国果蔬采摘机器人 1.2.2日本采摘机器人 1.2.3荷兰的黄瓜采摘机器人 1.2.4英国的蘑菇采摘机器人 1.2.5国内研究进展 1.3果蔬采摘机器人特点分析 1.3.1作业对象的非结构性和不确定性 1.3.2作业对象的娇嫩性和复杂性 1.3.3良好的通用性和可编程性 1.3.4操作对象和价格的特殊性 1.4本题的主要工作 2.机械手结构设计类型分析与选型 2.1机械手功能需求分析和运行流程 2.1.1机械手功能需求分析 2.1.2机械手的运行流程 2.2机械手结构分析与选择 2.2.1机械手末端执行器结构方案选择 2.2.2机械手手臂结构分析与选择 2.3本章小结 3.机械手末端执行器的结构设计 3.1机械手手指尺寸设计 3.2机械手手指的结构设计 3.2.1设计方案的选择 3.2.2机械手结构原理分析 3.3.3机械手连杆结构设计 3.4本章小结 4.多自由度手臂设计 4.1多自由度手臂的设计概述 4.2机械手空间分析和尺寸计算 4.3手臂尺寸的确定 4.4本章小结 5.动力系统的选型 5.1动力系统分析 5.2各元件动力系统的选择与计算 5.2.1末端执行器驱动关节直线步进电机的选择 5.2.2手腕电机的选型 5.2.3手臂电机的选择 5.2.4直线电动滑台的选择 5.3本章小结 6.齿轮校核计算及材料选择 6.1齿轮校核计算 6.2材料的选择 6.3本章小结 7.机械手视觉系统、传感系统及控制系统简述 7.1机械手视觉系统简述 7.2机械手机械视觉设计 7.3传感系统简述 7.4控制系统PLC 7.5本章小结 8.总 结 致 谢 参考文献 ……………
|

【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |