智能物流小车底盘系统设计 |
您所在的位置:网站首页 › 智能小车底盘图纸大全 › 智能物流小车底盘系统设计 |
智能物流小车底盘系统设计
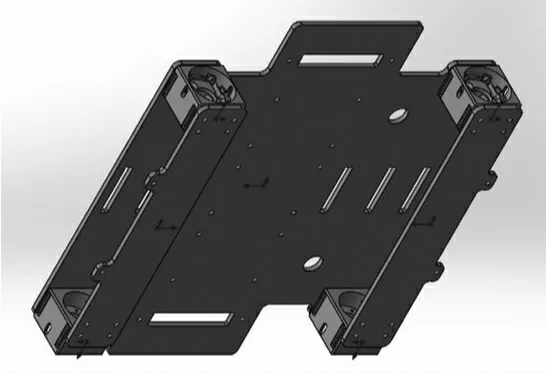
胡振圆,王路平,付 睿 (1.沈阳航空航天大学 航空发动机学院,辽宁 沈阳 110000;2.沈阳航空航天大学 工程训练中心,辽宁 沈阳 110000;3.沈阳航空航天大学 自动化学院,辽宁 沈阳 110000) 目前网上购物发展迅速,导致物流行业急剧发展,但传统的分拣模式已不能满足物流行业的需求,整个物流行业也逐渐向智能化、自动化发展,此时智能物流机器人就应运而生。本文提出一种用来配合物品运输的循迹式全向底盘系统,并对其机械设计方案、硬件电路设计方案以及相关程序算法进行详细介绍。 1 机械设计方案1.1 车身框架设计车身框架作为底盘上最重要的部件,起着连接行走机构,安装其他硬件,承载所有重量的重要作用,合理地安排各个硬件在车体上的位置,不仅可以使得整个系统看起来简洁,而且有效的布局还可以控制车体的重心位置,减少在系统工作过程中因为机械设计错误带来的干扰。 为了保证底盘的离地间隙较小和整个系统的重心较低,提高整个系统运行的稳定性,将车身框架的投影面设计为一个正方形并且采取了上下双层板的结构。而对于上下两板的连接,将减速电机支架作为连接件,形成了一个坚固的盒式结构,既可以保证4个麦克纳姆轮全部接触地面,同时也不会因承载力过大而发生严重的形变。上下两板规格和材质均采用3 mm环氧板,雕刻机加工。车身框架结构如图1所示。
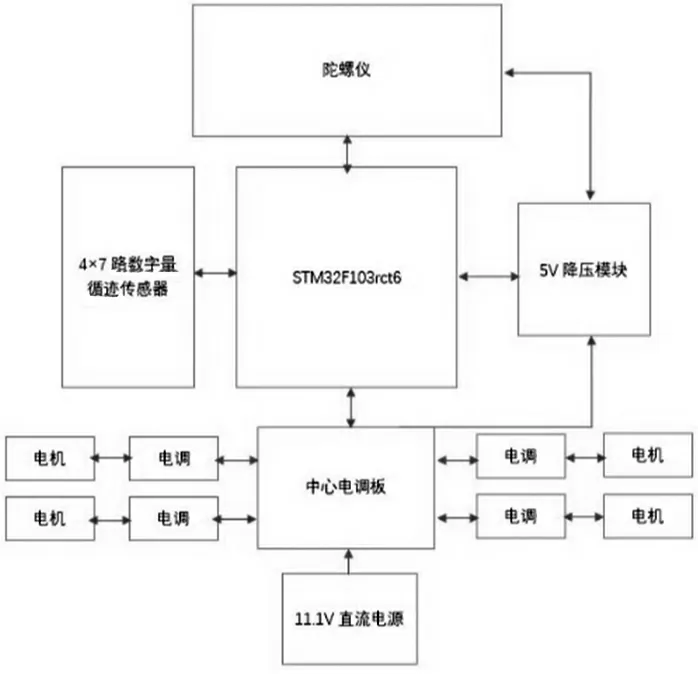
图1 车身框架结构 1.2 行走机构设计物流小车需要实现在作业区域的全向移动,针对该问题,采取的解决方案为麦克纳姆轮全向移动方案。 基于麦克纳姆轮技术的全方位运动,设备可以实现前行、横移、斜行、旋转及其组合等运动方式。因此在此基础上,智能物流小车平台可以实现在转运空间有限、作业通道狭窄的环境中运作,不但可以提升工作效率,而且在降低人力成本方面具有明显的效果。 2 硬件电路设计方案智能物流小车底盘硬件电路主要分为信息采集定位单元、信息处理单元、运动执行单元、矫正单元4个部分,采用11.1 V直流电源为全部单元进行供电。底盘系统的硬件电路结构如图2所示。
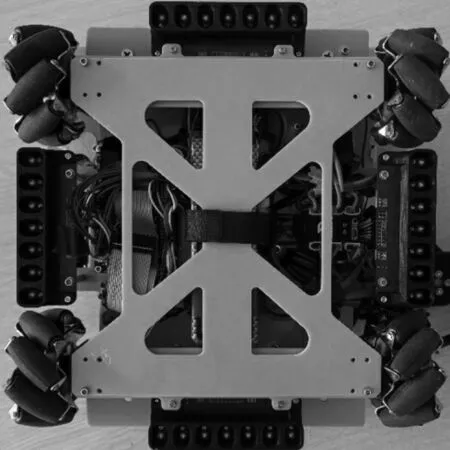
图2 底盘系统的硬件电器结构 2.1 信息采集定位单元根据设计要求,物流小车要对位于地面上的黑色线条进行识别并沿黑线进行运动,为了保证识别的准确性和降低容错率,我们采用了4组7路数字量循迹传感器,并结合数据混合算法和滤波算法,将其识别率大大提高。安装位置以及实物如图3所示。
图3 安装位置及实物 智能物流小车的循迹使用了7路数字量循迹传感器检测黑线。车身前后左右各布置一套传感器。当物流车向各个方向平移时,各个方向的传感器起到辅助行进作用,而与其行进方向垂直的灰度传感器负责对行进的格数进行计数。从出发点开始,物流小车会根据程序规定的方向和格数,按照预定的路径行进,从而到达各个指定位置。 2.2 信息处理单元如何对采集到的全部信息进行高效快速地处理,该物流小车底盘系统采用了STM32F103rct6单片机。该型单片机拥有较高的性能,主流的Cortex内核,并且可支持丰富的外设,功耗较低,性价比较高,除此之外还拥有强大的软件支持。 2.3 运动执行单元底盘的运动执行单元采用了大疆公司的RM C610无刷电机调速器和RM M2006 P36直流无刷减速电机以及RM电调中心板2。 11.1 V直流电源接在电调中心板上,在4个接线端子上安装电调电源线和信号线,再将直流电机接线端子与电调另一端相连,运动执行单元组成完毕。而运动执行机构与STM32单片机之间通过CAN总线进行通信。 2.4 矫正单元在底盘运动过程中,行进方向在受到外界扰动的情况下,会产生一定程度上的偏移量,此时就需要系统对其进行矫正。为此,该底盘系统采用了高精度航向角陀螺仪HWT101DT实时对底盘状态进行监控和矫正。 2.4.1 PID角度控制 车身角度在运动和搬运物料过程中,因轮子摩擦力不足,重心偏移等外界扰动,车身角度发生偏转,在PID角度控制下能够自动恢复到初始车身角度,保证车身角度一直稳定在初始角度即目标角度。而整个平衡回路必须同时具备良好的冲击响应和阶跃响应性能,即要求对冲击信号和阶跃信号有响应的快速性、平滑性和稳定性。换言之,要求系统上升时间短、无震荡、稳态误差为零。 全程中以实时检测的车身角度为输入量,车身初始角度为目标值,每次对角度的误差进行积分,对角度进行微分,最后通过Kp将输出量转化成合适的速度差,将该速度差加上基本速度为实际速度,达到物流车运行全程时刻矫正自身角度的目的。公式如下:
2.4.2 PID速度控制 Robomaster的电机带有霍尔传感器,可以反馈转速以及位置信息,因此可以通过闭环方式进行控制。期望即电机目标转速,反馈即我们通过霍尔传感器获得的电机实际转速,将其做差得到误差,然后送入控制器中。控制器根据内部的算法得到结果,使电机的实际转速恰好等于目标转速。由于误差和控制器输出都是时变的,我们分别假设其为err(t)和U(t),这样我们就可以引出连续型PID的公式:
P控制器:出现超调和静态误差。如图4所示。
图4 P控制器
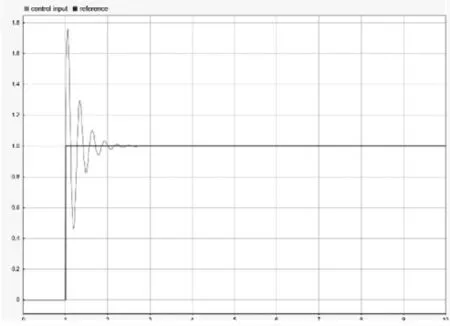
PI控制器:消除静态误差,但超调依然存在,消除静差时间延长。如图5所示。
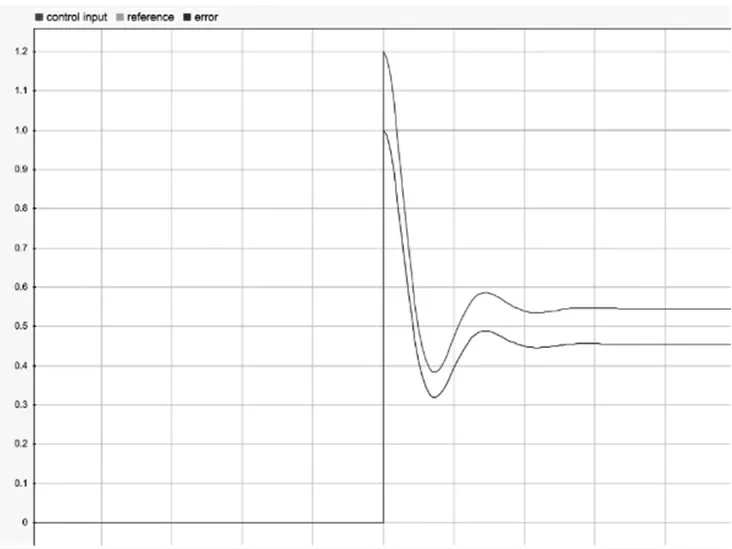
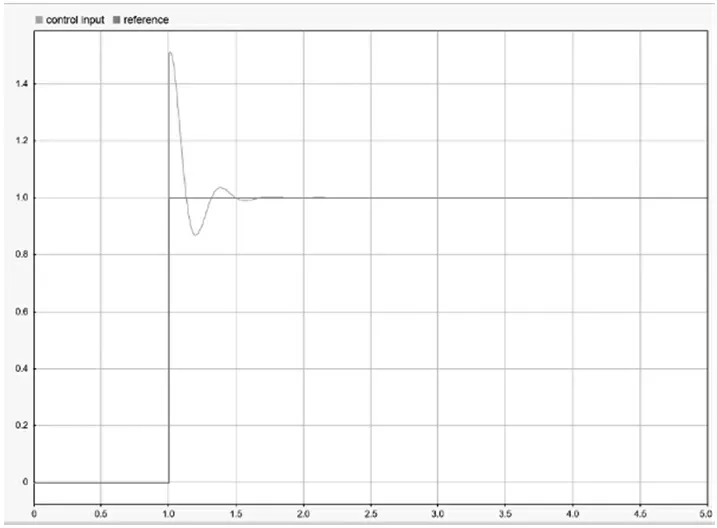
图5 PI控制器 PID控制器:超调量大大减小,系统恢复稳定的时间加快。如图6所示。
图6 PID控制器 3 现有定位方式改进方案目前物流车循迹方式采用的是7路数字模拟灰度传感器,但此方案适用于速度较小的情况下,速度过大会导致每次停车点位置偏移过大,而物流搬运对小车的运行速度和定位准确度有着很高的要求,下步改进方案通过光流定位实现物流车的高速运行和定位精准。 光流是通过检测图像中光点和暗点的移动,来判断图像中像素点相对于物流车的移动速度。光流传感器能对视觉运动进行测量并输出二维测量值,在得到光流X、Y轴方向的速度之后,通过积分便可以得到位置数据。最终使用的数据为加速度计数据与光流数据融合,以便于实现更好的效果。光流传感器的运用可得到场地所有点的坐标,引入PID算法,令目标坐标为期望,实现物流车的准确定位。 4 结束语本项目是基于STM32单片机,采用C语言进行编程的一款循迹式全向移动底盘。本文根据智能物流小车的使用要求,对物流小车的底盘进行了机械设计和硬件电路设计。整个底盘系统实现了在接收任务之后,自主地进行循迹,定点停车等工作,并在实施任务过程中,矫正单元实时对误差进行监控并矫正,确保了任务完成的准确度,为学习自动化控制、人工智能以及机器人相关知识的人群提供了宝贵经验。但整个系统的定位方式还有改进空间,在升级硬件和改进算法之后,定位精度会大大提高。 |




【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |