2022数学建模国赛B题:无人机定位(国二分享) |
您所在的位置:网站首页 › 无人机飞行编队 › 2022数学建模国赛B题:无人机定位(国二分享) |
2022数学建模国赛B题:无人机定位(国二分享)
|
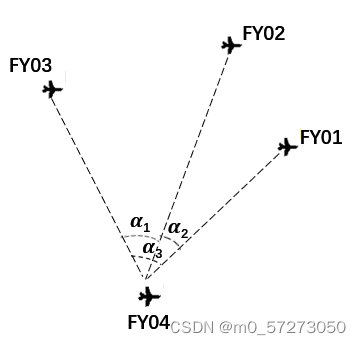
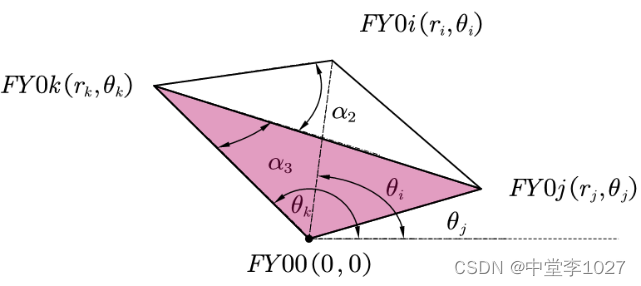
无人机集群在遂行编队飞行时,为避免外界干扰,应尽可能保持电磁静默,少向外发射电
磁波信号。为保持编队队形,拟采用纯方位无源定位的方法调整无人机的位置,即由编队中某
几架无人机发射信号、其余无人机被动接收信号,从中提取出方向信息进行定位,来调整无人
机的位置。编队中每架无人机均有固定编号,且在编队中与其他无人机的相对位置关系保持不
变。接收信号的无人机所接收到的方向信息约定为:该无人机与任意两架发射信号无人机连线
之间的夹角(如图
1
所示)。例如:编号为
FY01
、
FY02
及
FY03
的无人机发射信号,编号为
FY04
的无人机接收到的方向信息是
𝛼
1
,
𝛼
2
和
𝛼
3
。

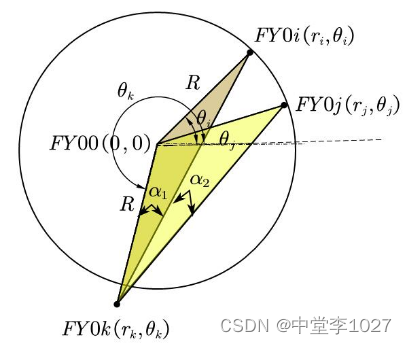
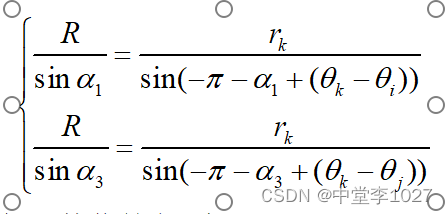
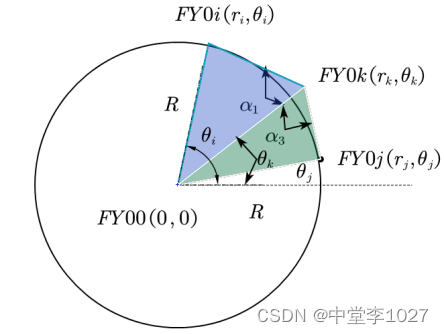
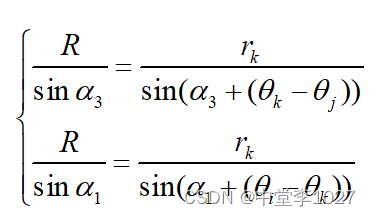
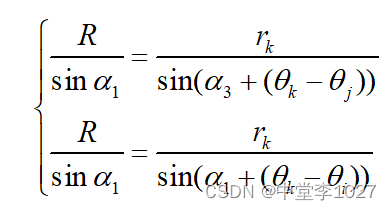
对△i0k和△j0k分别运用正弦定理建立关系式:
△i0k和△j0k的情况如图所示:
然后对其运用正弦定理建立等式:
同理可得:
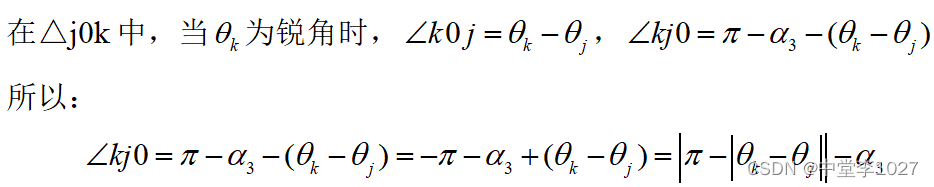
仅仅是单纯考虑α之间的关系肯定是不够的,也需要考虑θk锐角和钝角的情况。
图6 当θk为钝角
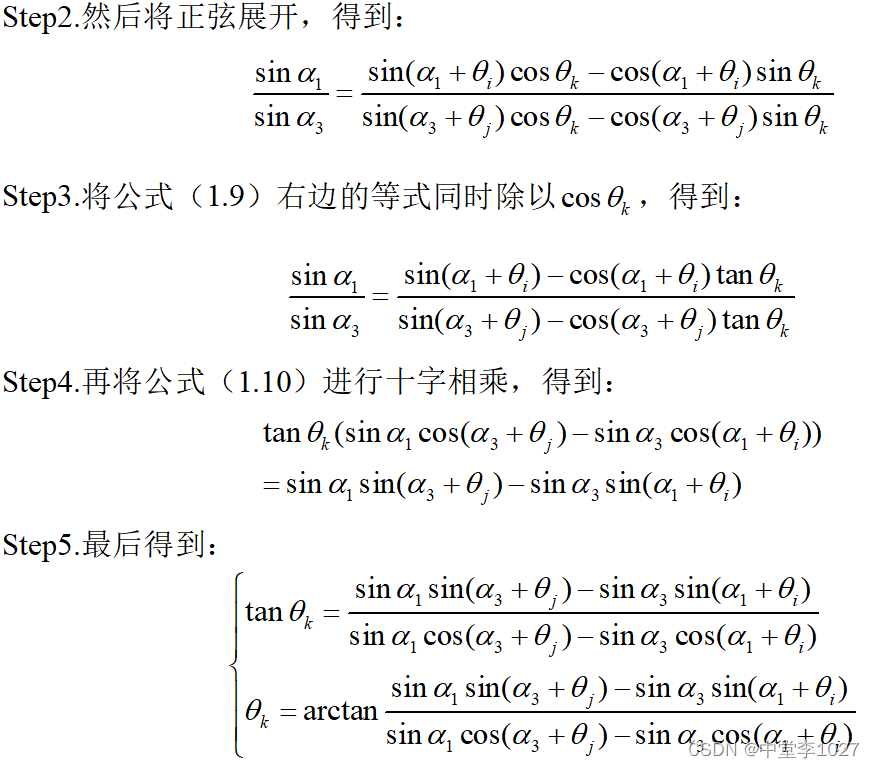
很显然,这样分析与之前的α的三种情况区别不大,但有总比没有好。 --------------------------------------------------------------------手动分割--------------------------------------------------------------------------------------------------------------接下来是方程的求解:
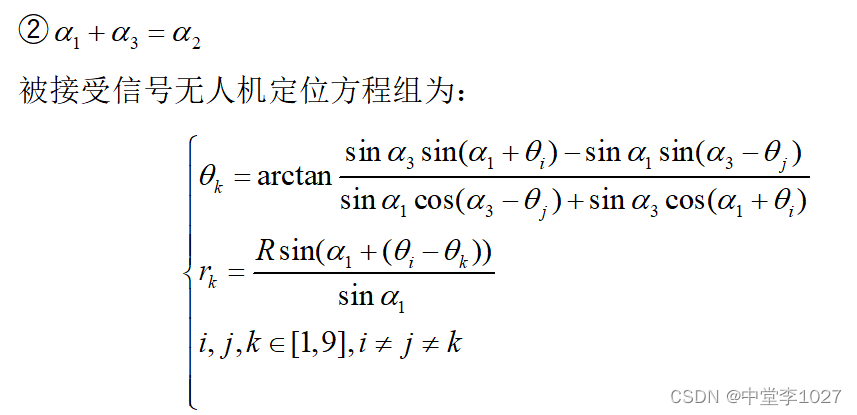
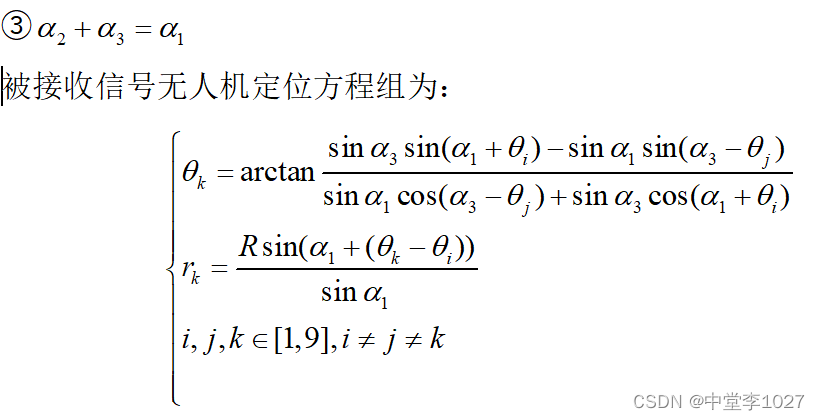
同理可得:
计算出来的θk根据原点对称有两个解,由于被接受信号无人机位置只有微小偏差,所以只有唯一解,需要对输出的θk确定取值范围,根据小问(3)可知极径的最大偏差为12,所以设定最大极径偏差为14,还有小问(3)输出的偏差最大为0.28rad,所以设定最大角度偏差为50/180,即:
接下来就是对之前定位模型的验证:
计算出来的rk=99.37与设定的理想圆的半径(100)几乎相等,说明第(1)小问正弦定位模型的准确性很高。 问题(2): 问题中只已知编号FY00(0,0),FY01(R,0)的位置无偏差,这时需要对外围圆周中的8架,第一次随机选择一架无人机,当未知数大于方程个数时,这时需要随机选择两架无人机,再次列出正弦公式,对比未知数和方程数的个数,当未知量与方程数相等时,就可以求解定位方程组。只不过需要添加约束来解出具体增加的无人机编号。
模型汇总:
很遗憾,当时没有时间,对第二小问并未进行验证。但思路基本是对的。 问题(3): 求解前的准备: 1.筛选作为信号发射源的无人机
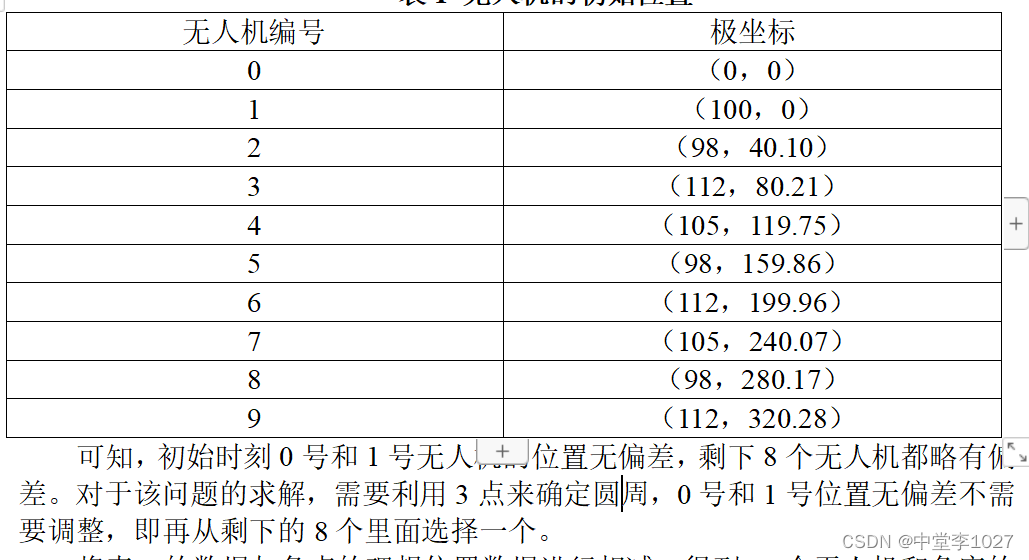
将表的数据与各点的理想位置数据进行相减,得到10个无人机和角度的差值:
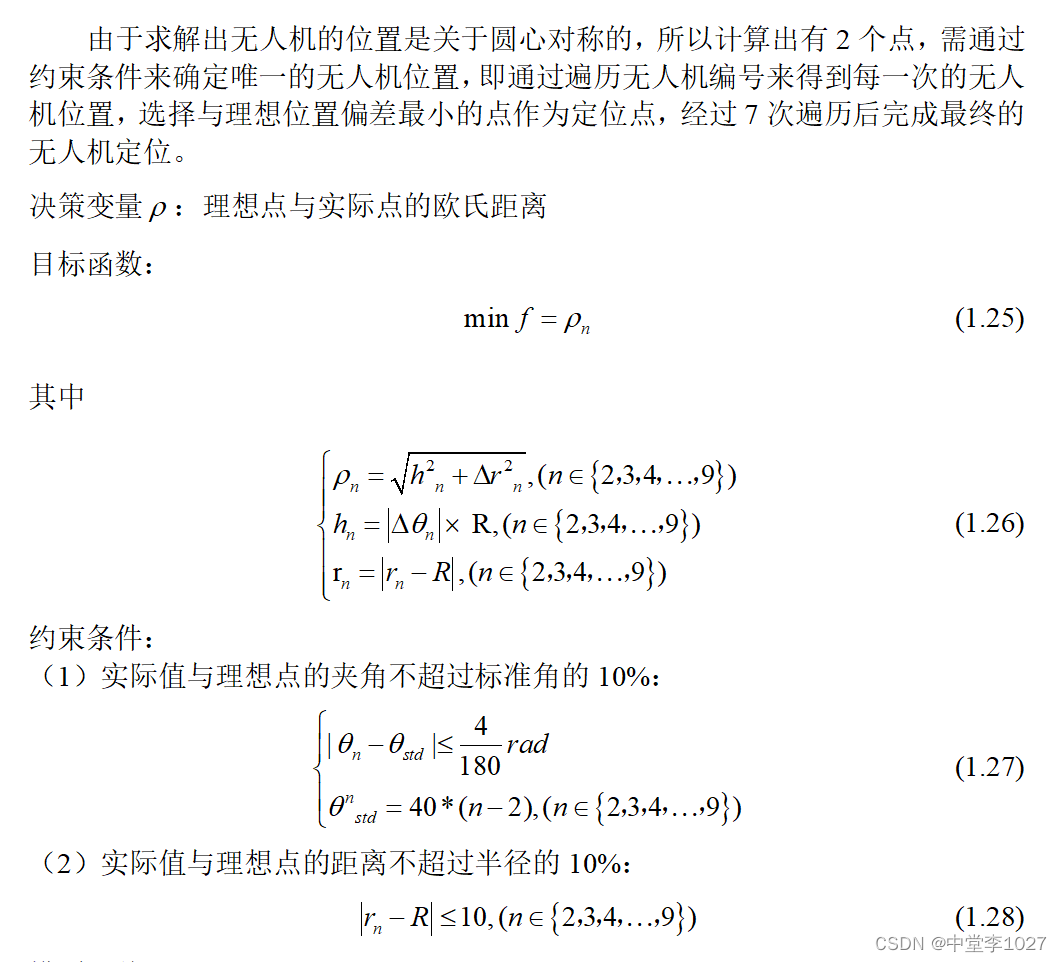
再计算每架无人机初始位置与理想位置的距离,筛选距离最小的无人机,将其定为发射源。运用欧氏距离对距离进行求解,有关距离的阴影部分可以近似看作△,记第n架无人机的弧长为:
其中△θn是圆心角度数(弧度制),R是半径。 第n架无人机初始位置与理想位置的距离为:
但第一小问中,α是已知的,第三小问的阿尔法与第一小问的阿尔法有点小小的不同,需建立方程进行求解:
在等腰△0jk中:
偏差优化模型的建立:
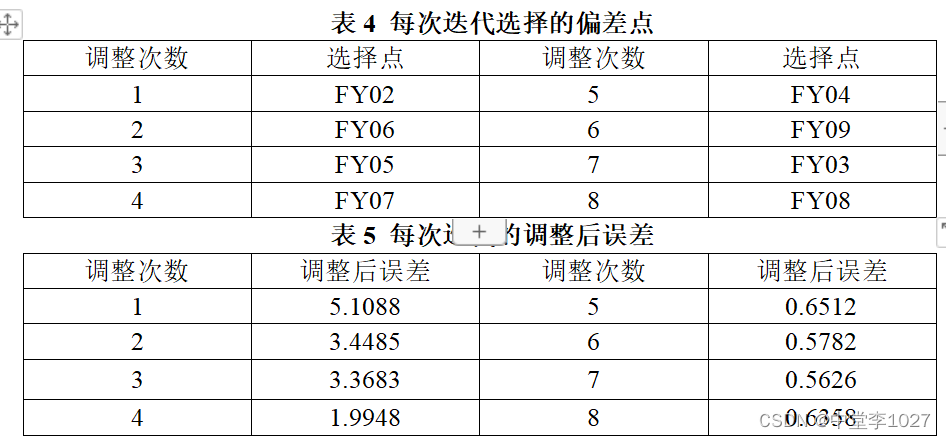
模型的求解:
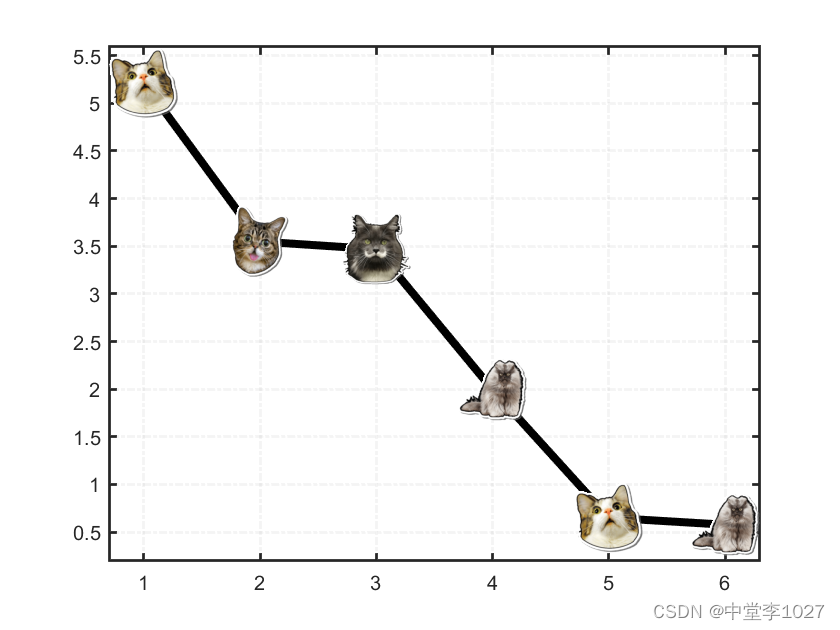
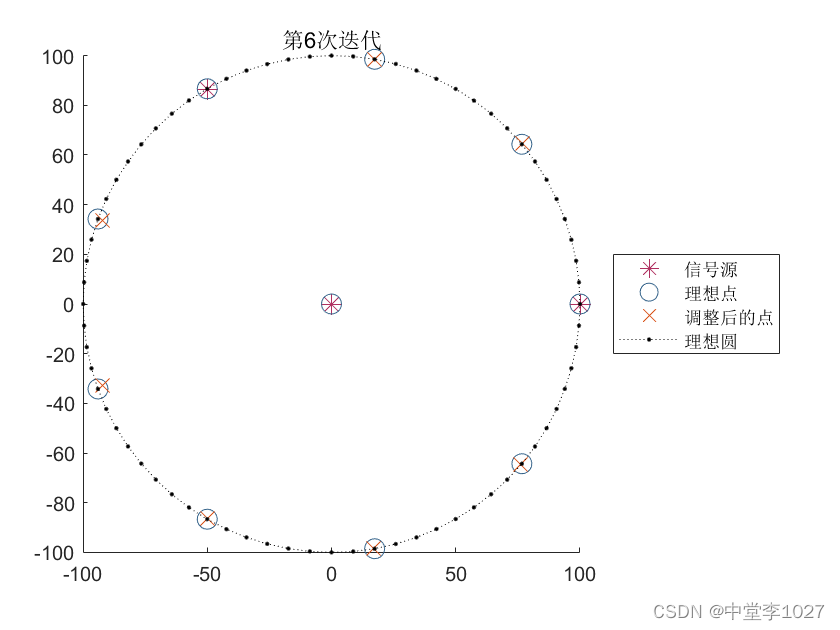
误差迭代曲线 无人机迭代图:
具体调整方案为:
本人不会改格式,所以文章格式很乱,且思路不是很清晰,实在不好意思,大家将就着看吧。 |























【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |