论文《四旋翼无人机姿态系统复合连续快速非奇异终端滑模控制》阅读与复现 |
您所在的位置:网站首页 › 无人机终端在哪里打开 › 论文《四旋翼无人机姿态系统复合连续快速非奇异终端滑模控制》阅读与复现 |
论文《四旋翼无人机姿态系统复合连续快速非奇异终端滑模控制》阅读与复现
|
目的
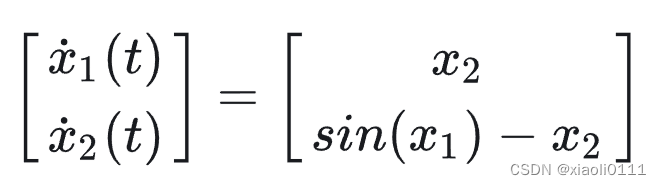
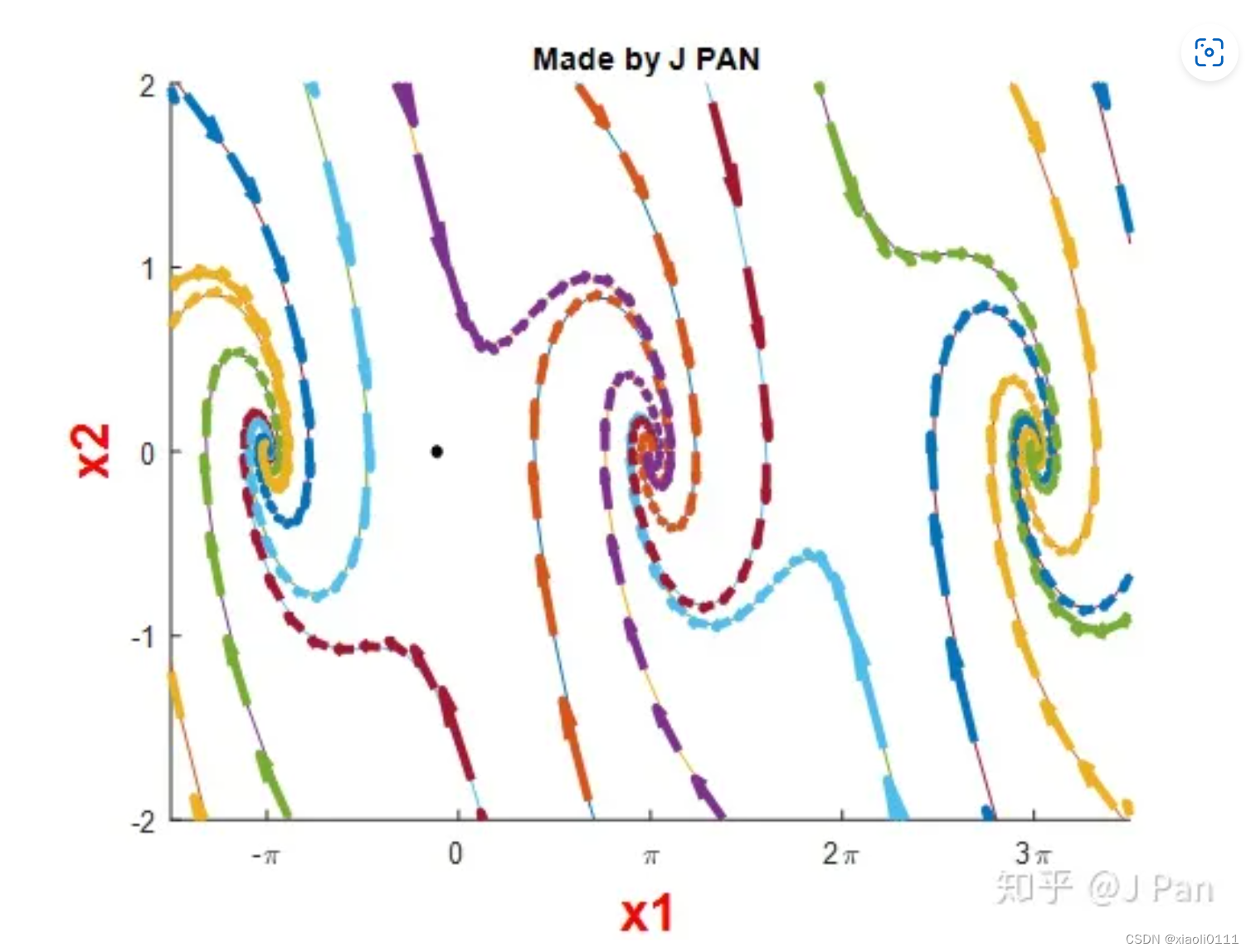
作为一个飞行控制领域的小白,想要先找一个比较简单的论文尝试上手复现一下,刚好在b站看到了有up讲解这篇文章这程序复现的太优雅了!四旋翼无人机姿态系统复合连续快速非奇异终端滑模控制_哔哩哔哩_bilibili,借着up的框架学习一下simulink的使用方法,并学习一下滑模控制相关的内容。现控部分都还给老师了,恶补一下原理。 更新中,希望自己在两周内完成。 滑模控制 滑动模式控制(sliding mode),是基于李雅普诺夫第二方法对控制器进行设计的一种方案。核心思想是设计一个状态反馈控制器。通过引入滑模面,选择合适的趋近律,重新构造李雅普诺夫函数 关于滑模控制,我觉得这篇文章十分好理解滑模控制器最强解析 - 知乎 李雅普诺夫方法 平衡点要研究系统的稳定性,需要找到系统的平衡点。假设一个系统的状态空间表达式为 以x1为横坐标,x2为纵坐标,则它们的运动轨迹为:
图中的漩涡中心就是平衡点,也就是状态变量的导数为0的点。 而平衡点可能会遇到扰动,从而打破稳定的状态。李雅普诺夫稳定性理论,研究的便是扰动下平衡点的稳定性问题。
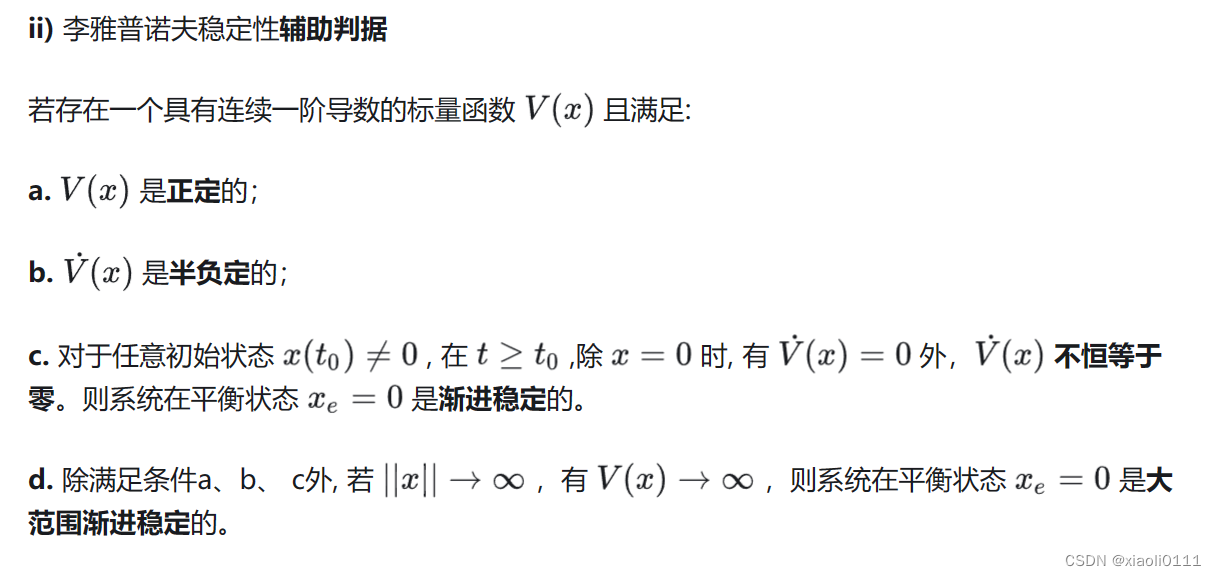
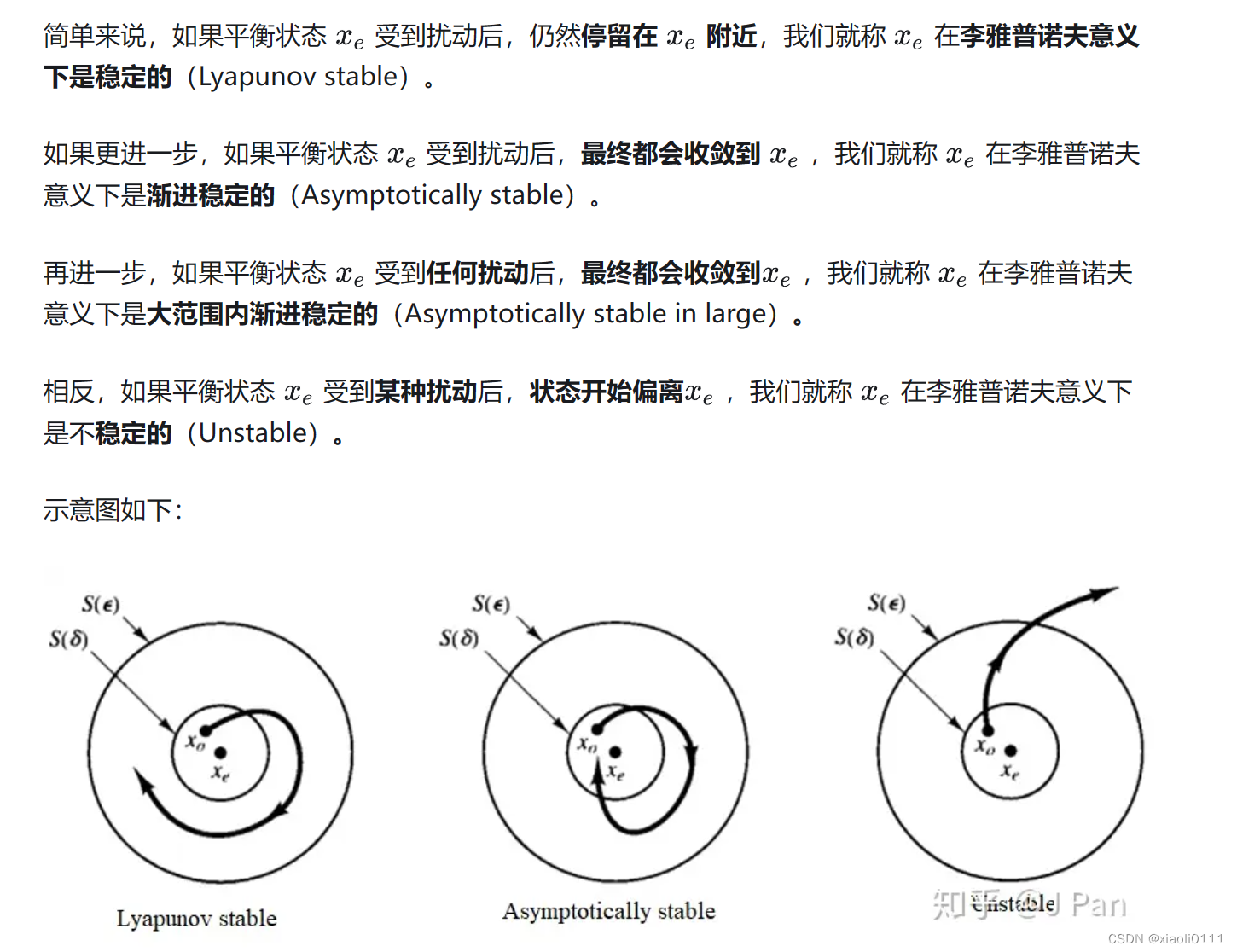
当系统受到扰动后,可能会呈现出来四种状态 李雅普诺夫稳定(Lyapunov stable) 渐进稳定(Asymptotically stable) 大范围内渐近稳定(Asymptotically stable in large) 不稳定(Unstable)关于李雅普诺夫理论,参考知乎如何理解李雅普诺夫稳定性分析 - 知乎 (zhihu.com)
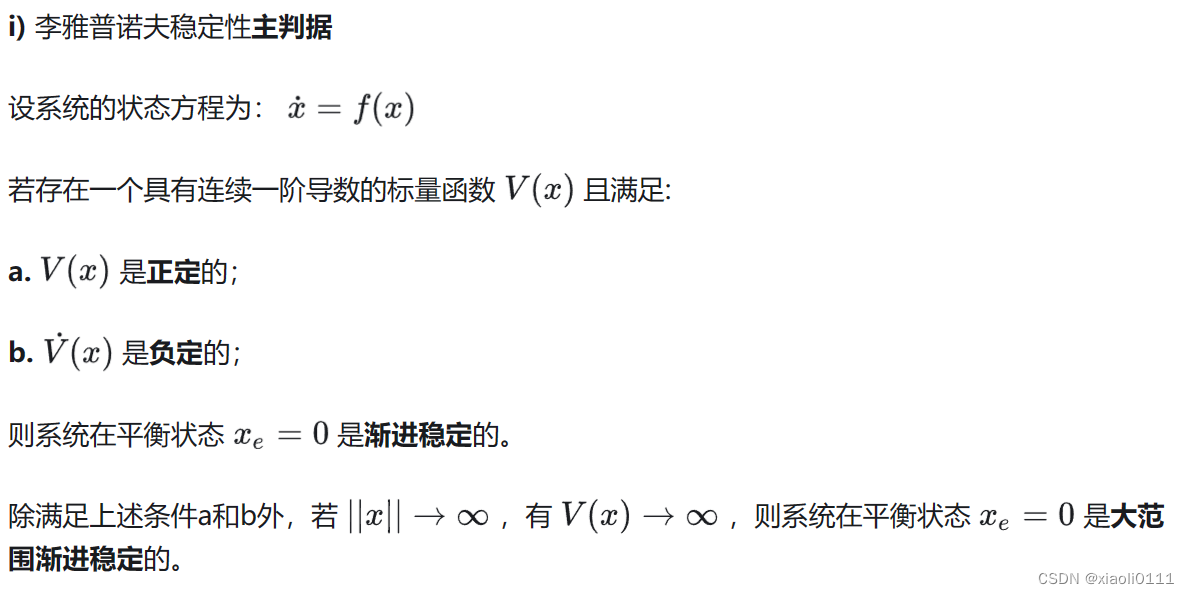
给一个扰动,若系统输出有界,则系统在该扰动状态下是有界的 状态稳定求出系统矩阵A的所有特征值(对于非线性系统,在平衡状态附近一次线性化),若系统所有特征值均有负实部,则系统是稳定,否则系统是不稳定的。参考:定性分析(二):稳定性和李亚普洛夫方法 - 知乎 (zhihu.com) 李雅普诺夫第二法 物理事实1.扰动消失后,能量不增加——李雅普诺夫意义下的稳定 2.扰动消失后,能量衰减至极小值——渐进稳定 3.扰动消失后,能量不断增加——不稳定 我个人的理解:熵增的状态是一种混乱的状态,熵减或不变的状态才是稳定的状态。 数学表示
 李雅普诺夫方法的应用 李雅普诺夫方法的应用
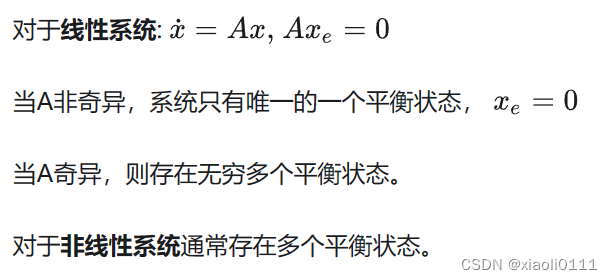
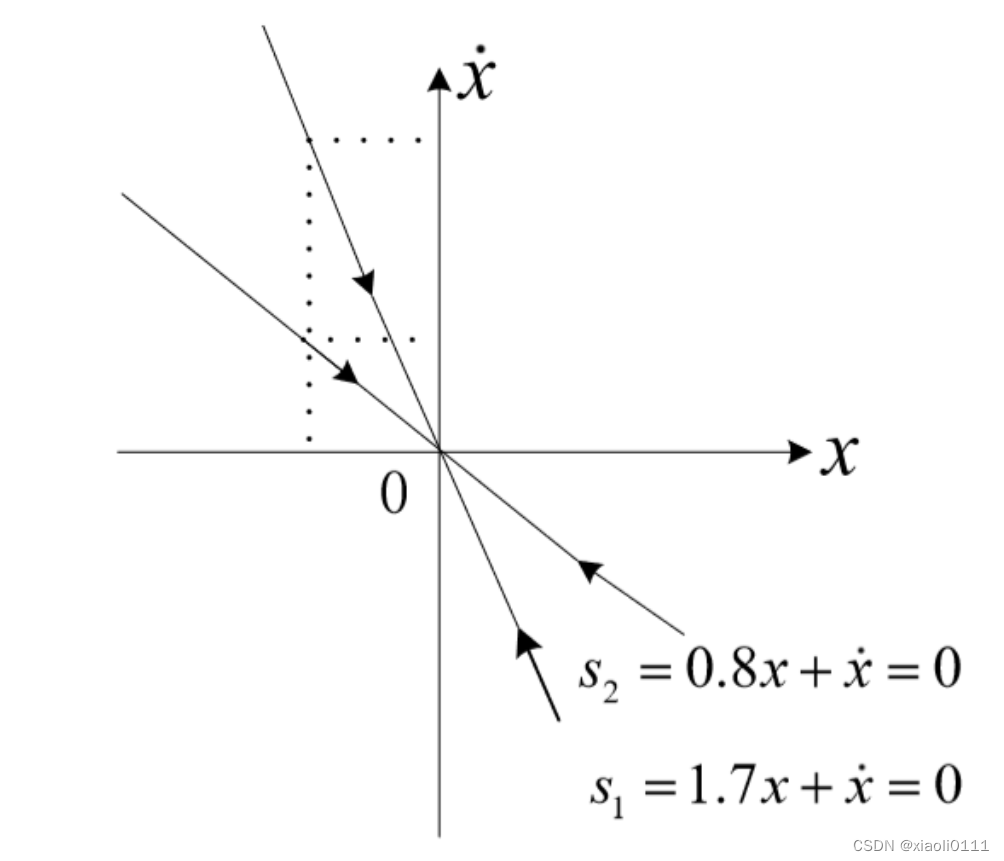
参考:定性分析(二):稳定性和李亚普洛夫方法 - 知乎 线性系统 线性定常系统的渐进稳定性判据线性时变系统的渐进稳定性判据 非线性系统 雅可比矩阵法变量梯度法 总结李雅普诺夫方法描述了稳定的遇到扰动后能否保持稳定的问题,在很多论文中都会给出李雅普诺夫方法(特别是第二法)的证明,以验证控制器的稳定性。第二法主要是与能量相关的,关键是找到V(x),在此基础上衍生出了很多变种。 滑模面已知滑模面为: 用相平面来表示
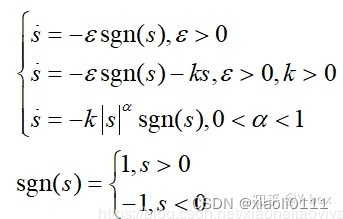
滑模控制会让系统沿着滑模面趋于0,从而让实际系统趋近于理想系统。 趋近律对滑模面s求导 因此,对控制量u的设计,也就是对趋近律
这种趋近律的设计是满足李雅普诺夫稳定性定理的,可以令
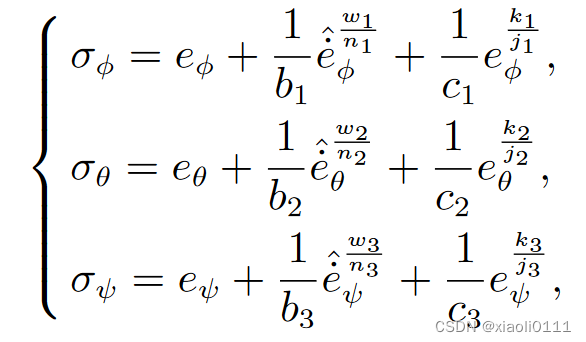
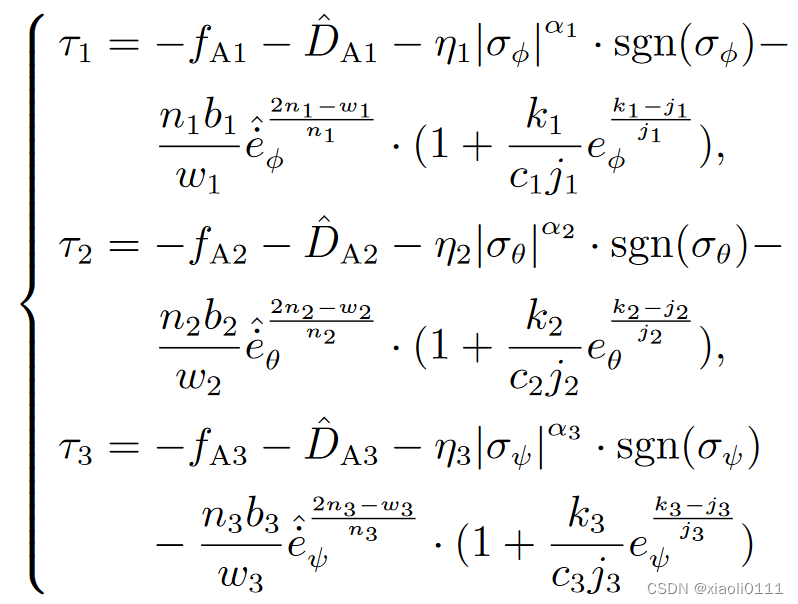
滑模面的设计包含了:误差、误差导数的估计值(观测值) ,但我不理解为什么要这么设计滑模面。滑模面设计的依据是什么? 控制器设计
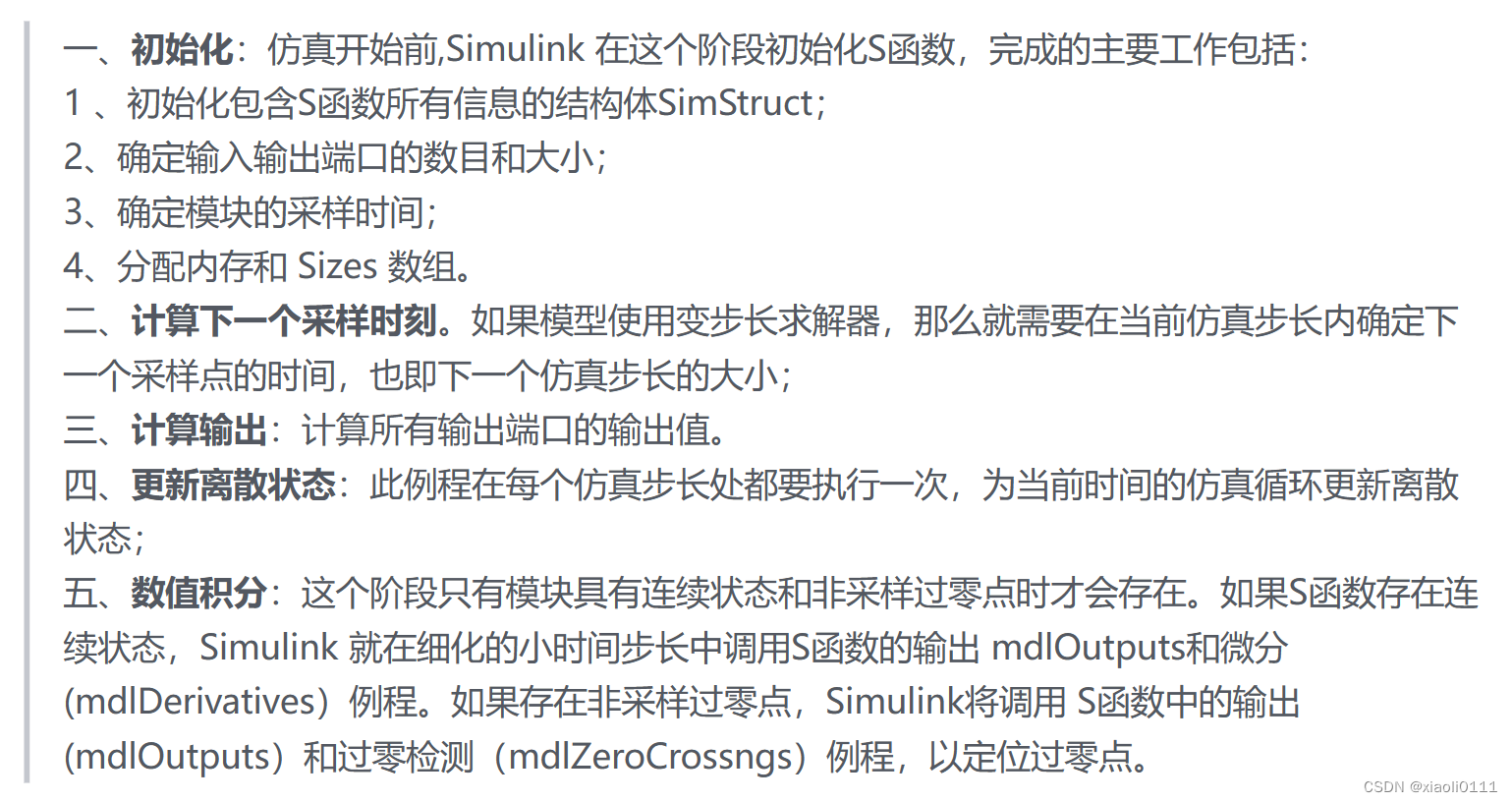
问题: 1.为什么要这么设计? 2.怎么在simulink里搭建?能不能参考一个简单的滑模控制器的案例? 啊 稳定性分析 复现工作 四旋翼无人机姿态系统建模通过一个S函数,输入为四旋翼无人机的升力和每个轴的扭矩,输出为姿态角和姿态角速率信息。 s函数s函数能够描述一个动态系统,具体的使用方法参考:Simulink之——S函数 - 知乎 (zhihu.com)
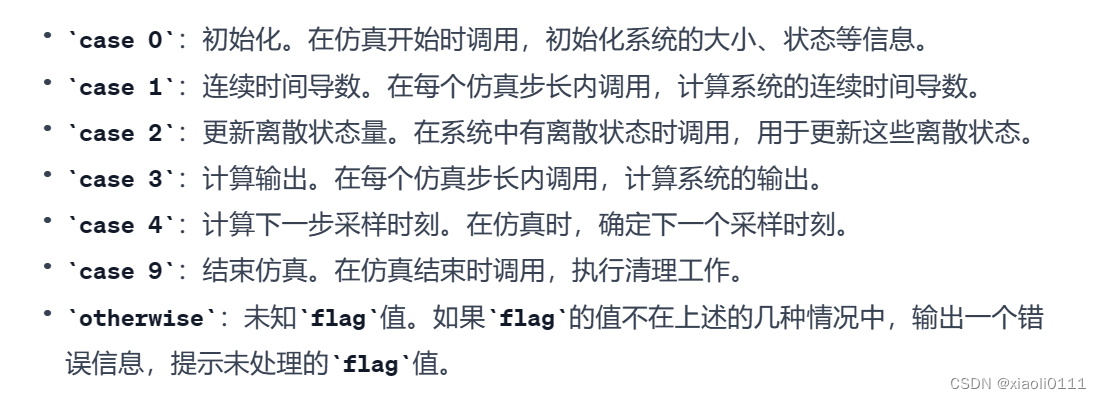
实现上述步骤,是通过不同阶段的标志“flag”实现的。
simsizes函数是S函数模块特有的,它用来创建了一个包含有系统大小信息的结构体。 |

【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |