|
基于STM32的斯特林驱动小车论文 【内容摘要】:根据“第九届上海市大学生工程训练综合能力竞赛”的规则和要求,设计了一种采用斯特林技术和自动控制技术,自主设计并制作一台可将液态乙醇燃料转换为机械能的、方向自动控制的自控车。本小车底板和支架均采用3D打印,小车经过反复调试,具有良好的按规则的循迹和避障,轨迹有较好的准确性和重复性。本文主要介绍了小车的设计和电控部分就行了分析。 【关键词】: 斯特林发动机 3D打印 循迹避障 STM32 0 引言 根据“第九届上海市大学生工程训练综合能力竞赛规则”的要求,设计制作一种可实现将热能转化为小车行走的动能的装置,利用酒精灯燃烧的热能实现小车的循迹避障行走。我们在设计小车时,其中除轴承、螺钉、螺栓、键、销、垫圈等类型的标准件,小车零件全部使用3D打印工艺完成。小车要求采用三轮结构,其中一轮为转向轮,另外两轮为行进轮,如图1所示。  图1 .斯特林驱动小车示意图 1 小车主要机构的设计 分析竞赛题目我们决定使用学校内机器,自主设计并用3D打印制作出全部零件,所以小车的结构设计一切要根据3D打印工艺。设计应坚持原则:结构尽量简单;传动件数少;足够的刚度;振动小;操作、调整方便灵活。 1.1 运动转换机构 小车给定的能量来自酒精灯燃烧的热能转换为机械能,但是斯特林发动机得的到转速太快,需要使用齿轮和皮带传动降速。我们的方案是用两级降速,第一级先用皮带连接斯特林的滚轮到小车的轴承,这里的转速比为1:2,第二级做一个齿轮和主动轮上的齿轮啮合,设计他们的转速比为1:8,这样可以有效地降速。这样总的转速比为1:16。 图1 .斯特林驱动小车示意图 1 小车主要机构的设计 分析竞赛题目我们决定使用学校内机器,自主设计并用3D打印制作出全部零件,所以小车的结构设计一切要根据3D打印工艺。设计应坚持原则:结构尽量简单;传动件数少;足够的刚度;振动小;操作、调整方便灵活。 1.1 运动转换机构 小车给定的能量来自酒精灯燃烧的热能转换为机械能,但是斯特林发动机得的到转速太快,需要使用齿轮和皮带传动降速。我们的方案是用两级降速,第一级先用皮带连接斯特林的滚轮到小车的轴承,这里的转速比为1:2,第二级做一个齿轮和主动轮上的齿轮啮合,设计他们的转速比为1:8,这样可以有效地降速。这样总的转速比为1:16。 
图2 齿轮模型图
1.2 行走机构的设计 按照比赛规定,小车为三轮结构,其中一个轮子为转向轮,且采用单轮驱动,由于小车在行进时会遇见障碍物,所以小车在转弯时必然造成主动轮和从动轮之间有差速。为了降低小车制作难度,我们将小车主动轮和从动轮中间的轴断开,让从动轮只随动。与此同时,为了降低小车重心对轨迹的影响,两个后轮的间距尽量增大些。小车三个轮子的分布如图3所示。  图3 小车三轮布置 1.4底板的设计制造 底板作为支撑小车的主体,它的强度关系着小车行走的稳定性与轨迹的重复性,而底板的设计并不是一蹴而就,我们的底板经历了多个版本,最终调整到一个强度比较合适的尺寸。如下图4 图3 小车三轮布置 1.4底板的设计制造 底板作为支撑小车的主体,它的强度关系着小车行走的稳定性与轨迹的重复性,而底板的设计并不是一蹴而就,我们的底板经历了多个版本,最终调整到一个强度比较合适的尺寸。如下图4  图4 小车底板模型图 2 斯特林发动机原理 按本次比赛要求采用斯特林发动机,斯特林发动机的原理是在封闭的气缸内充有一定容积的工质。气缸一端为热腔,另一端为冷腔。工质在低温冷腔中压缩,然后流到高温热腔中迅速加热,燃料在气缸外的燃烧室内连续燃烧,通过加热器传给工质,工质不直接参与燃烧,也不更换。它是通过气体(工质:一般为氢气或氦气)受热膨胀、遇冷压缩而产生动力的。不过,在使用中斯特林有一个较明显的缺点反应慢。因为热源来自外部,传热需要时间,因此发动机需要经过一段时间才能使气缸的温度变化。就是说斯特林发动机在提供有效动力之前需要一段时间进行预热,不能快速让他动力输出。 3 单片机控制分析 3.1测距避障模块的设计 整个电控系统的核心就像人类的大脑,操纵者整个系统,它应该具备处理系统数据,接受和发送指令控制各个模块的功能。单片机能够将接收到的数据进行快速的处理运算,并根据相应的程序发送指令去控制相应的模块。单片机占用的空间小,信息存储量大,计算运行速度高,低功耗,适应能力强,反应灵敏,易掌握实现模块化设计。在本次比赛中,硬件控制中心我们使用单片机型号为 stm32f103c8t6。 测距模块的选用决定着单片机是否能接收到准确的赛道信息,是否能按照设计的程序成功避障.测距寻迹模块的选用的要求应该具有对赛道信息准确反映的高精度,发射和接收声波信号的灵敏性,识别障碍物的范围广。传感器测距是小车识别障碍信息来躲避障碍的根据,在众多的测距一起里,一般有超声波和红外传感器。超声波传感器是将超声波信号转换成其他能量信号,通常是电信号的传感器。超声波是振动频率高于20KHz的机械波。它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。 运用时间计时的方法测量距离,工作原理是给予超声波一个大于10us的上升沿电平信号,这个上升沿由控制单元单片机发出,当超声波模块接收到这个信号的时候,超声波模块就会有频率为40kHz的声波发出,定时器在这个时候就尅是计时,当声波遇到障碍物时被反射回来,系统就会停止计时器的工作,所以测量出来的距离为声速与定时器计时时间的二分之一的乘积,即见式(3.1) 图4 小车底板模型图 2 斯特林发动机原理 按本次比赛要求采用斯特林发动机,斯特林发动机的原理是在封闭的气缸内充有一定容积的工质。气缸一端为热腔,另一端为冷腔。工质在低温冷腔中压缩,然后流到高温热腔中迅速加热,燃料在气缸外的燃烧室内连续燃烧,通过加热器传给工质,工质不直接参与燃烧,也不更换。它是通过气体(工质:一般为氢气或氦气)受热膨胀、遇冷压缩而产生动力的。不过,在使用中斯特林有一个较明显的缺点反应慢。因为热源来自外部,传热需要时间,因此发动机需要经过一段时间才能使气缸的温度变化。就是说斯特林发动机在提供有效动力之前需要一段时间进行预热,不能快速让他动力输出。 3 单片机控制分析 3.1测距避障模块的设计 整个电控系统的核心就像人类的大脑,操纵者整个系统,它应该具备处理系统数据,接受和发送指令控制各个模块的功能。单片机能够将接收到的数据进行快速的处理运算,并根据相应的程序发送指令去控制相应的模块。单片机占用的空间小,信息存储量大,计算运行速度高,低功耗,适应能力强,反应灵敏,易掌握实现模块化设计。在本次比赛中,硬件控制中心我们使用单片机型号为 stm32f103c8t6。 测距模块的选用决定着单片机是否能接收到准确的赛道信息,是否能按照设计的程序成功避障.测距寻迹模块的选用的要求应该具有对赛道信息准确反映的高精度,发射和接收声波信号的灵敏性,识别障碍物的范围广。传感器测距是小车识别障碍信息来躲避障碍的根据,在众多的测距一起里,一般有超声波和红外传感器。超声波传感器是将超声波信号转换成其他能量信号,通常是电信号的传感器。超声波是振动频率高于20KHz的机械波。它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。 运用时间计时的方法测量距离,工作原理是给予超声波一个大于10us的上升沿电平信号,这个上升沿由控制单元单片机发出,当超声波模块接收到这个信号的时候,超声波模块就会有频率为40kHz的声波发出,定时器在这个时候就尅是计时,当声波遇到障碍物时被反射回来,系统就会停止计时器的工作,所以测量出来的距离为声速与定时器计时时间的二分之一的乘积,即见式(3.1)  (3.1) V代表在空气介质中,超声波传播的速度快慢。是定时器从开始计时到停止计时的时间。无碳小车测距装置设计了安装了三个HC-SR04超声波,分别安装在小车的车头,左边和右边,互相呈45度角.可以在0.02-4m的范围内进行测量,测量误差达到3mm,由单片机的引脚触发,当单片机发送10us的上升沿给超声波,超声波就会发出40KHz方波,可以连续发射,在经过障碍物的反射后,当有信号返回到超声波的接收端时,超声波会自动检测。下图5是超声波的时序发生过程: (3.1) V代表在空气介质中,超声波传播的速度快慢。是定时器从开始计时到停止计时的时间。无碳小车测距装置设计了安装了三个HC-SR04超声波,分别安装在小车的车头,左边和右边,互相呈45度角.可以在0.02-4m的范围内进行测量,测量误差达到3mm,由单片机的引脚触发,当单片机发送10us的上升沿给超声波,超声波就会发出40KHz方波,可以连续发射,在经过障碍物的反射后,当有信号返回到超声波的接收端时,超声波会自动检测。下图5是超声波的时序发生过程:  图5 超声波时序图 工作电压为4.5-5.5v,能将电能和超声波相互转化。能够发生相互转化的装置被称为是换能器。本方案中使用的型号为HC-SR04超声波测距传感器模块,方法简单,模块性能稳定,距离测量精确。下图6为超声波传感器模块系统内部的工作原理图。 图5 超声波时序图 工作电压为4.5-5.5v,能将电能和超声波相互转化。能够发生相互转化的装置被称为是换能器。本方案中使用的型号为HC-SR04超声波测距传感器模块,方法简单,模块性能稳定,距离测量精确。下图6为超声波传感器模块系统内部的工作原理图。 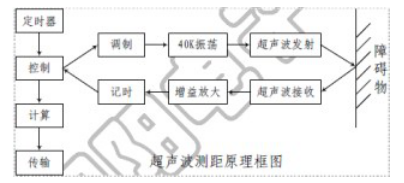 图6 超声波内部工作原理图 3.3转向装置的设计 转向设计得精确与否直接决定这小车成功绕过障碍,转向装置的设计结构应简单紧凑,转向阻力小,转向元件的选用控制精度应较高,容易控制,能够输出足够的扭矩使小车转向前轮转向。在众多的智能小车,航模中大多都用到了舵机,舵机是一种角度控制的装置,作为一种输出执行机构,舵机通过单片机输出一定时间的时基脉冲,通过pwm脉冲宽度调制,控制脉冲的占空比,就可以得到相对应的角度,进而实现车轮的转向。我们采用了SG90舵机,如下图7 图6 超声波内部工作原理图 3.3转向装置的设计 转向设计得精确与否直接决定这小车成功绕过障碍,转向装置的设计结构应简单紧凑,转向阻力小,转向元件的选用控制精度应较高,容易控制,能够输出足够的扭矩使小车转向前轮转向。在众多的智能小车,航模中大多都用到了舵机,舵机是一种角度控制的装置,作为一种输出执行机构,舵机通过单片机输出一定时间的时基脉冲,通过pwm脉冲宽度调制,控制脉冲的占空比,就可以得到相对应的角度,进而实现车轮的转向。我们采用了SG90舵机,如下图7  图7 SG90舵机 3.4循迹装置的设计 红外传感器巡线的基本原理是利用物体的反射性质,我们本次比赛是巡黑线行驶,当红外线发射到黑线上时会被黑线吸收掉,发射到其他的颜色的材料上会有反射到红外的接受管上。我们根据这点的不同写相应的代码完成小车巡线功能。我们本次实验采用的是四路红外传感器分别连接在STM32主控板上的io口上。其中中间两路巡线是一直在黑线上,小车会直行,当任意一个出来,则小车会自动纠正。下图7和8分别是红外巡线模块实物图和巡线分析图。 图7 SG90舵机 3.4循迹装置的设计 红外传感器巡线的基本原理是利用物体的反射性质,我们本次比赛是巡黑线行驶,当红外线发射到黑线上时会被黑线吸收掉,发射到其他的颜色的材料上会有反射到红外的接受管上。我们根据这点的不同写相应的代码完成小车巡线功能。我们本次实验采用的是四路红外传感器分别连接在STM32主控板上的io口上。其中中间两路巡线是一直在黑线上,小车会直行,当任意一个出来,则小车会自动纠正。下图7和8分别是红外巡线模块实物图和巡线分析图。  图8 四路红外巡线模块 图8 四路红外巡线模块  图9 传感器状态 图9 传感器状态
|