文章简单讲解机器人关节是如何定义的 |
您所在的位置:网站首页 › 工业机器人运动速度定义 › 文章简单讲解机器人关节是如何定义的 |
文章简单讲解机器人关节是如何定义的
|
引言:每个工业机器人都由独立的关节组成,这些关节使工业机器人由于其相对运动而具有与人类相似的作用。这些关节的连接有助工业于机器人在执行各种任务的过程中移动材料,工具和设备。文章将主要介绍机器人关节是如何定义的这一知识点。
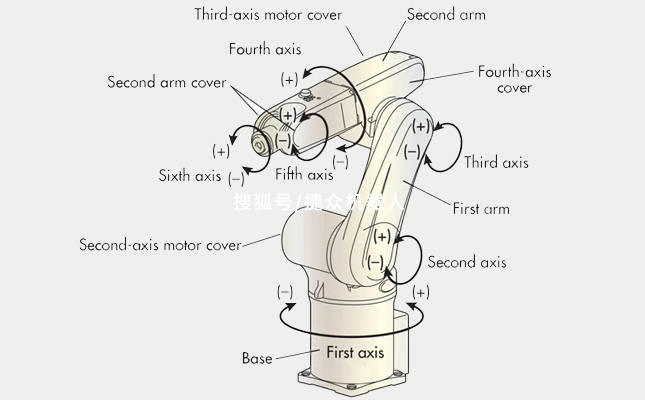
机器人关节可自由弯曲和移动。同样机器人中的链接可以比喻为人体的骨骼。通过这些链接传输功率是人类和工业机器人的共同特征。 工业机器人设备与传统生产线中的自动化专用设备相比,工业机器人具有突出的操作灵活性和功能。因此,工业机器人设备特别适用于多品种和小批量生产,以便快速响应市场变化和消费者需求。 机器人关节是如何定义的机器人关节是两个连杆之间的连接,允许它们之间进行相对运动。接头的主要用途机器人是提供受控制的亲属移动两个连接的链接之间通常称为输入链接和输出链接。链接被认为是刚性组件机器人机制。通常,每个关节提供工业机器人具有一个运动自由度。 机器人通常是某种形式的接合结构的其中有各种不同的配置。通过多个旋转和线性运动或关节的连结来实现这些结构。每一个关节所提供的运动一起,可使机器人结构或机械臂共同定位到特定位置。为了提供将安装在工业机器人末端的工具在任何位置以任何角度定位的能力,需要六个关节或六个自由度,通常称为六轴机器人。
机器人常见的配置是关节臂,机器人关节的作用非常类似于人类的手臂,其具备较高的灵活性。关节臂机器人的关节运动很复杂,因此很难可视化。手臂的结构意味着每个关节必须承受以下所有关节的重量。这会影响承载能力、机器人可以处理的负载以及重复性和准确性。机器人关节的结构不是特别僵硬,整体可重复性是所有轴的累积。 机器人关节运动形式在机器人的主杆构件在工业机器人主体结构中形成不同的坐标形式。工业机器人的运动形式分为可分为直角坐标机器人、圆柱坐标机器人、球面坐标机器人、关节坐标和并联机器人等。 直角坐标机器人关节运动形式为其臂部可沿三个直角坐标移动。直角坐标工业机器人是指在工业应用中包含三维空间正交平移的自动化设备,可以实现自动控制、可重复编程和运动自由。适用于多种场合,具有超大行程,结合能力强等优点。
圆柱坐标型机器人关节运动形式为可作升降、回转和伸缩动作。圆柱坐标型工业机器人包括上、下盘转台相对于包含上和下固定板的机架转动。上下圆盘上装有丝杠和导杆。第一螺母总成安装到丝杠。第二螺母与导杆相连,所述第一螺母和第二螺母安装在活动部件上。轴结构包括:带有纵向空腔与内轴同心度,并且可以独立转动的中间轴。 文章简单介绍了机器人关节是如何定义的,浏览文章能了解到在机器人关节是两个连杆之间的连接,允许它们之间进行相对运动。接头的主要用途机器人是提供受控制的亲属移动两个连接的链接之间通常称为输入链接和输出链接。链接被认为是刚性组件机器人机制。通常,每个关节提供工业机器人具有一个运动自由度。 电机转子外圆加工自动化机械手设备【EKTHINK】 工业机器人抓手作用是什么 抓取和操纵物体 工业机器人系统 对机器人的运动进行编程返回搜狐,查看更多 责任编辑: |
 机器人关节如何定义
机器人关节如何定义
【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |