工业机器人示教器按钮功能介绍 |
您所在的位置:网站首页 › 工业机器人示教器按键名称 › 工业机器人示教器按钮功能介绍 |
工业机器人示教器按钮功能介绍
|
5、快捷功能键:F1、F2、F3、F4、F5为快捷功能键,分别对应当前显示屏上的快捷菜单中的功能。 6、模式选择键:工业机器人“示教”“执行”模式选择键。 7、第二功能键:与工业机器人示教器上其他键同时使用,实现不同功能。 8、工业机器人使能:工业机器人不用此键。
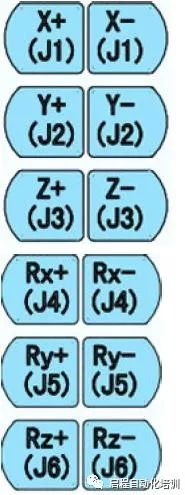
9、选择按钮:工业机器人暂时未定义该键功能,待后续开发使用。 10、窗口切换按钮:工业机器人暂时未定义该键功能,待后续开发使用。 11、主菜单按钮:示教模式,主菜单为:显示、选择、用户、功能、编辑;执行模式,主菜单为:选择、编辑。 12、坐标系选择按钮:关节坐标、直角坐标、工具坐标、用户坐标的切换选择。 13、执行速度设定按键:手动执行速度加减设定键。手动执行速度以微动->慢速->中速->快速的方式循环设定,并且,执行速度图标随设定相应改变。 14、工业机器人轴操作键: 对工业机器人各轴进行操作的键。示教模式,只有按住轴操作键,工业机器人才动作机器人按照选定坐标系和手动速度运行,在进行轴操作前,请务必确认设定的坐标系和手动速度是否正确。
15、数字键:按数值键可输入键上的数值和符号。“.” 是小数点, “-”是负号。 16、预留键:根据不同应用,功能定义不同。 17、光标键:按此键时,光标朝箭头方向移动。根据画面的不同,光标的大小、可移动的范围和区域有所不同。在显示程序内容的画面中,光标在“NOP”行时,按光标键的上,光标将跳到程序最后一行,光标在“END”行时,按光标键的下,光标将跳到程序第一行。与SHIFT 键一起使用,可以实现上下翻页、回首行、回末行功能。
18.外部轴选择按钮:当机器人外部轴加上本体轴,轴数量不超过6 个时,外部轴键不起作用,各轴都通过轴操作键控制运动;如果轴数量超过6 个时,多余6 个的其它轴被定义为外部轴,通过外部轴键,使轴操作键可以操作多余6 个的其它轴。 19、取消按钮:取消不想保存的设置修改;取消不严重的错误报警。 20、确认按钮:执行命令或数据的登录,机器人当前位置的登录,与编辑操作等相关的各项处理时的最后确认键。在输入缓冲行中显示的命令或数据,按[回车]键后,会输入到显示屏的光标所在位置。完成输入、插入、删除、修改等操作。 21、删除按钮:程序编辑时用的删除。与[确认]键配合使用,可以删除光标选择的程序行。
22、修改按钮:程序编辑时用的修改。与[确认]键配合使用,可以修改光标所在的程序行指令参数。 23、插入按钮:程序编辑时用的插入。与[确认]键配合使用,可以在程序中向下插入一行指令。 24、退格按钮:输入字符时,删除最后一个字符。 25、IO状态按钮:工业机器人暂时未定义使用,待后续开发。 26、实时显示按钮:工业机器人暂时未定义使用,待后续开发。
27、运动类型按钮:在程序编辑时,可以直接按[确认]键记录相应类型的运动指令。不需要通过运动类菜单进行指令输入。 28、正向运动按钮:示教模式时检查程序;按住Deadman,再按住[正向运动]键,程序逐行向下执行。 29、反向运动按钮:示教模式时检查程序;按住Deadman,再按住[反向运动]键,程序逐行向上执行。 三、工业机器人系统示意图:
|





 返回搜狐,查看更多
返回搜狐,查看更多【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |