自由度(degree of freedom) |
您所在的位置:网站首页 › 在平面上确定物体位置需要知道()个条件 › 自由度(degree of freedom) |
自由度(degree of freedom)
|
自由度(degree of freedom)
1. 刚体的自由度2. 运动副与关节3. 机器人的自由度4. 机器人自由度的诠释
Reference: 物理中自由度怎么理解?平动,转动,振动的自由度,还有刚体的自由度?你真的懂这是几轴吗?还是先从自由度学起吧,一篇文章全搞懂自由度的概念是从解析几何中导出的:在一根轴上确定一个点的位置需要一个坐标,在一个面上需要两个坐标,在三维空间中需要三个坐标,这种数学上的确定点位置的独立坐标的最低个数在对应的物理问题中就是质点的自由度。对于质点,空间中最少需要三个坐标,也就是自由度为三。 对于刚体,由于不再是一个质点,三维问题中在质心位置不变的情形下可能处于不同的状态,这种状态称为姿态,这种姿态也需要用三个坐标来表示。对于刚体需要确定其姿态及位置,在三维中姿态坐标与位置坐标各三个,一共六个坐标,也就是说空间刚体问题是有六个自由度。位置坐标可以是刚体上任意一点的三个空间坐标,用来描述刚体的平动;姿态坐标用于描述转动,常用的选取方案包括:欧拉角、罗德里格斯角、欧拉参数。 对于柔性体,自由度为无穷。 1. 刚体的自由度自由度指物体能够对坐标系进行独立运动的数目,物体所能进行的运动如下图:
如一个刚体只能上下移动且不能旋转,那么就只有一个自由度。 2. 运动副与关节运动副是两构件直接接触并能产生相对运动的活动联接。运动副引入约束进而限制6个自由度中的某些自由度。在机器人学中,运动副也成为机器人的关节。
机器人的自由度是指机器人所具有的独立坐标轴运动的数目,但一般不包括手部(末端操作器)的开合自由度(开合本身就没有自由度吧)。自由度表示了机器人动作灵活的尺度,但也不是自由度越多越好。因为随着自由度的增加,其结构也会变得更加复杂。
上图中,展示了一个简单的机械结构的动作图,关于它的自由度数,我们可以通过下图来计算。因而可以得出,这是一个简单的3自由度的机械臂。(动图中看着像两个,没有显示最底下那个轴的转动)
和电路一样,机器人的自由度也有串并联之分,它们之间的区别在哪呢?举一个简单的例子,串联机器人像是我们用一只手拿起一个东西,并联机器人就相当于两个手一起端一个东西。从我们生活经验来看(读者们可以自己端个杯子试试),并联机器人具有刚度大、承载能力强、精度高、末端件惯性小等优点,串联机器人具有结构简单、控制简单、运动空间大等优点。 而关于机器人自由度的完美诠释,我们举两个例子。 串联机器人–7自由度机械臂一般来讲,由之前我们所讲的刚体的自由度来看,6自由度的机械臂已经足够确定末端物体的位姿,那为什么还要增加一个冗余自由度呢?先看一个有趣的例子。  7 自由度机器人 7 自由度机器人 
可以看出,7 自由度机器人可以实现不改变末端位置,只改变机械臂姿态。这对于 6 自由度机器人来说是无法实现的。 |
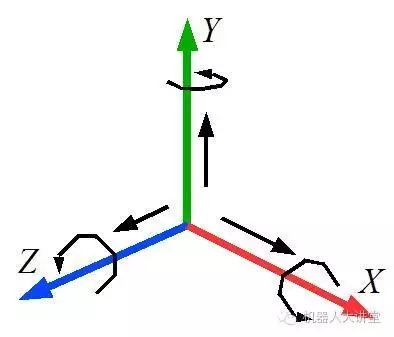 一个物体可以相对于坐标系,进行三个平移和三个旋转运动,即一个简单的物体有六个自由度。
一个物体可以相对于坐标系,进行三个平移和三个旋转运动,即一个简单的物体有六个自由度。 上图中列举了一些简单的运动副,按由上及下,由左及右的顺序依次为移动副、转动副、螺旋副、凸轮和球铰。移动副限制了一个方向移动的所有自由度,因而它只剩下一个自由度;转动副限制了一个方向转动以外的所有自由度,它也只剩下一个自由度;最后一个球铰引入3个约束,限制了所有方向的移动,因而只具有
x
x
x、
y
y
y 和
z
z
z 轴方向的转动,即3个自由度。
上图中列举了一些简单的运动副,按由上及下,由左及右的顺序依次为移动副、转动副、螺旋副、凸轮和球铰。移动副限制了一个方向移动的所有自由度,因而它只剩下一个自由度;转动副限制了一个方向转动以外的所有自由度,它也只剩下一个自由度;最后一个球铰引入3个约束,限制了所有方向的移动,因而只具有
x
x
x、
y
y
y 和
z
z
z 轴方向的转动,即3个自由度。

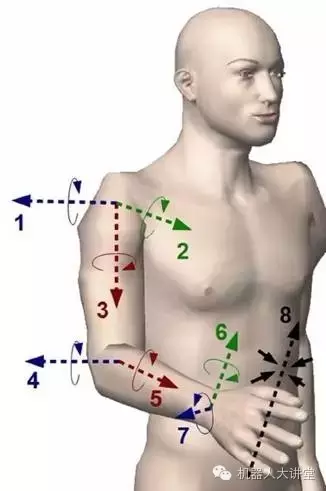 上图为人的手臂自由度剖析图,除去末端手指的自由自由度,这恰好也是7个自由度。如果我们把上图分解为一个个转动副的关节,便可以得到下面的数学模型:
上图为人的手臂自由度剖析图,除去末端手指的自由自由度,这恰好也是7个自由度。如果我们把上图分解为一个个转动副的关节,便可以得到下面的数学模型: 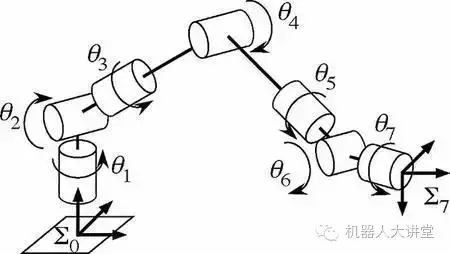 那么为什么上帝多为我们的手臂创造了七个自由度而不是六个呢?关于它的答案有特别学术的解释:改善运动学特性(奇异构型、关节位移超限、工作环境中存在的障碍);改善动力学特性(七轴机器人可以实现关节力矩的再分配,使整个机器人的力矩分配均匀合理);容错性(即使有一个关节失效,还可以继续正常工作)。
那么为什么上帝多为我们的手臂创造了七个自由度而不是六个呢?关于它的答案有特别学术的解释:改善运动学特性(奇异构型、关节位移超限、工作环境中存在的障碍);改善动力学特性(七轴机器人可以实现关节力矩的再分配,使整个机器人的力矩分配均匀合理);容错性(即使有一个关节失效,还可以继续正常工作)。【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |