用evo工具分析ORB |
您所在的位置:网站首页 › 双目测距误差 › 用evo工具分析ORB |
用evo工具分析ORB
|
目录 前言一、evo工具的安装二、运行TUM数据集1.TUM单目数据集2.TUM RGB-D数据集 三、运行KITTI数据集1.KITTI单目数据集2.KITTI双目数据集 四、运行EuRoC数据集1.EuRoC单目数据集2.EuRoC双目数据集 五、使用evo工具分析1.常用指令2.用evo工具分析TUM3.用evo工具分析KITTI4.用evo工具分析EuRoC 前言 在ORB-SLAM2的学习过程中,不可避免的会用到这些数据集来运行程序,并且还会将运行轨迹与相机真实轨迹作对比,下面就介绍使用evo工具分析SLAM常用TUM,KITTI,EuRoC数据集。SLAM数据集TUM,KITTI,EuRoC数据集的下载地址与真实轨迹文件的查找总结的博客链接。 一、evo工具的安装可以使用evo工具将.csv文件形式的轨迹文件转换为TUM形式的轨迹文件。 evo_traj euroc data.csv --save_as_tumevo工具安装(参考链接),打开终端输入 pip install evo --upgrade --no-binary evo 二、运行TUM数据集TUM数据集官网下载地址,TUM数据集里面有深度图像和RGB图像。当使用单目模式时,仅用到rgb文件夹里的图片;当使用RGB-D模式时,需要用到depth和rgb两个文件夹里的图片,而且需要associate.py脚本文件关联 RGB 图像和深度图像(下面会说到)。 执行这个命令:./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUMX.yaml PATH_TO_SEQUENCE_FOLDER。将TUMX.yaml改为TUM1.yaml,TUM2.yaml或TUM3.yaml,分别用于freiburg1,freiburg2和freiburg3序列。将PATH_TO_SEQUENCE_FOLDER改为解压好的数据集文件夹路径。简单来说命令分为四个部分:1.TUM单目模式执行文件 2.训练好的词袋 3.参数文件 4.解压好的数据集路径 切换到 ORB_SLAM2/ 下,在终端里输入(对应路径改成自己的) ./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM3.yaml /home/d/文档/数据集/TUM数据集/rgbd_dataset_freiburg3_long_office_household 2.TUM RGB-D数据集在这步中我们需要使用RGB 图像和深度图像的关联文件,ORB-SLAM2的作者在examples/RGB-D/associations/路径下提供了某些序列的关联文件。 我们也可以使用 python 脚本associate.py(associate.py下载地址)关联 RGB 图像和深度图像。 将associate.py脚本放到下载并且解压好的rgbd_dataset_freiburg3_long_office_household/路径下,执行以下命令 python associate.py rgb.txt depth.txt > associations.txt接下来执行这个命令:./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUMX.yaml PATH_TO_SEQUENCE_FOLDER ASSOCIATIONS_FILE。将TUMX.yaml改为TUM1.yaml,TUM2.yaml或TUM3.yaml,分别用于freiburg1,freiburg2和freiburg3序列。将PATH_TO_SEQUENCE_FOLDER改为解压好的数据集文件夹路径。将ASSOCIATIONS_FILE改为相应关联文件的路径。简单来说命令分为五个部分:1.TUM RGB-D执行文件 2.训练好的词袋 3.参数文件 4.解压好的数据集路径 5.关联文件路径 切换到 ORB_SLAM2/ 下,在终端里输入(对应路径改成自己的) ./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM3.yaml /home/d/文档/数据集/TUM数据集/rgbd_dataset_freiburg3_long_office_household /home/d/文档/数据集/TUM数据集/rgbd_dataset_freiburg3_long_office_household/associations.txt 三、运行KITTI数据集KITTI数据集官网下载地址,使用灰度图像的KITTI数据集,里面有左目图像(image_0)和右目图像(image_1)。当使用单目模式时,仅用到image_0文件夹里的左目图片;当使用双目模式时,需要用到image_0和image_1两个文件夹里的图片。 下面以00数据集为例 1.KITTI单目数据集执行这个命令:./Examples/Monocular/mono_kitti Vocabulary/ORBvoc.txt Examples/Monocular/KITTIX.yaml PATH_TO_DATASET_FOLDER/dataset/sequences/SEQUENCE_NUMBER。将KITTIX.yaml改为KITTI00-02.yaml,KITTI03.yaml或KITTI04-12.yaml,分别用于序列0到2,序列3和序列4到12。将PATH_TO_DATASET_FOLDER改为解压好的数据集文件夹路径。将SEQUENCE_NUMBER改为00、01、02,…, 11 简单来说命令分为四个部分:1.KITTI单目模式执行文件 2.训练好的词袋 3.参数文件 4.解压好的数据集路径 切换到 ORB_SLAM2/ 下,在终端里输入(对应路径改成自己的) ./Examples/Monocular/mono_kitti Vocabulary/ORBvoc.txt Examples/Monocular/KITTI00-02.yaml /home/d/文档/数据集/Kitti数据集/00 2.KITTI双目数据集执行这个命令:./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTIX.yaml PATH_TO_DATASET_FOLDER/dataset/sequences/SEQUENCE_NUMBER。将KITTIX.yaml改为KITTI00-02.yaml,KITTI03.yaml或KITTI04-12.yaml,分别用于序列0到2,序列3和序列4到12。将PATH_TO_DATASET_FOLDER改为解压好的数据集文件夹路径。将SEQUENCE_NUMBER改为00、01、02,…, 11 简单来说命令分为四个部分:1.KITTI单目模式执行文件 2.训练好的词袋 3.参数文件 4.解压好的数据集路径 切换到 ORB_SLAM2/ 下,在终端里输入(对应路径改成自己的) ./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTI00-02.yaml /home/d/文档/数据集/Kitti数据集/00 四、运行EuRoC数据集EuRoC数据集官网下载地址,EuRoC数据集里面有左目图像(cam0)和右目图像(cam1)。当使用单目模式时,仅用到cam0文件夹里的左目图片;当使用双目模式时,需要用到cam0和cam1两个文件夹里的图片。 下面以MH_01_easy数据集为例 1.EuRoC单目数据集对 V1 和 V2 序列执行以下第一个命令,或对 MH 序列执行第二个命令。根据要运行的数据集更改PATH_TO_SEQUENCE_FOLDER和序列。 ./Examples/Monocular/mono_euroc Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml PATH_TO_SEQUENCE/mav0/cam0/data Examples/Monocular/EuRoC_TimeStamps/SEQUENCE.txt ./Examples/Monocular/mono_euroc Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml PATH_TO_SEQUENCE/cam0/data Examples/Monocular/EuRoC_TimeStamps/SEQUENCE.txt将PATH_TO_SEQUENCE改为解压好的数据集文件夹路径。将SEQUENCE改为对应数据集的序列文件 **简单来说命令分为五个部分:1.EuRoC单目模式执行文件 2.训练好的词袋 3.参数文件 4.解压好的数据集左目图像路径 5.对应的序列文件 ** 切换到 ORB_SLAM2/ 下,在终端里输入(对应路径改成自己的) ./Examples/Monocular/mono_euroc Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml /home/d/文档/数据集/EuRoc数据集/MH_01_easy/mav0/cam0/data Examples/Monocular/EuRoC_TimeStamps/MH01.txt 2.EuRoC双目数据集对 V1 和 V2 序列执行以下第一个命令,或对 MH 序列执行第二个命令。根据要运行的数据集更改PATH_TO_SEQUENCE_FOLDER和SEQUENCE。 ./Examples/Stereo/stereo_euroc Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml PATH_TO_SEQUENCE/mav0/cam0/data PATH_TO_SEQUENCE/mav0/cam1/data Examples/Stereo/EuRoC_TimeStamps/SEQUENCE.txt ./Examples/Stereo/stereo_euroc Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml PATH_TO_SEQUENCE/cam0/data PATH_TO_SEQUENCE/cam1/data Examples/Stereo/EuRoC_TimeStamps/SEQUENCE.txt将PATH_TO_SEQUENCE改为解压好的数据集文件夹路径。将SEQUENCE改为对应数据集的序列文件 **简单来说命令分为六个部分:1.EuRoC单目模式执行文件 2.训练好的词袋 3.参数文件 4.解压好的数据集左目图像路径 5.解压好的数据集右目图像路径 6.对应的序列文件 ** 切换到 ORB_SLAM2/ 下,在终端里输入(对应路径改成自己的) ./Examples/Stereo/stereo_euroc Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml /home/d/文档/数据集/EuRoc数据集/MH_01_easy/mav0/cam0/data /home/d/文档/数据集/EuRoc数据集/MH_01_easy/mav0/cam1/data Examples/Stereo/EuRoC_TimeStamps/MH01.txt 五、使用evo工具分析 1.常用指令以TUM数据集的rgbd_dataset_freiburg3_long_office_household为例介绍 绘制单个轨迹 evo_traj tum groundtruth.txt -p
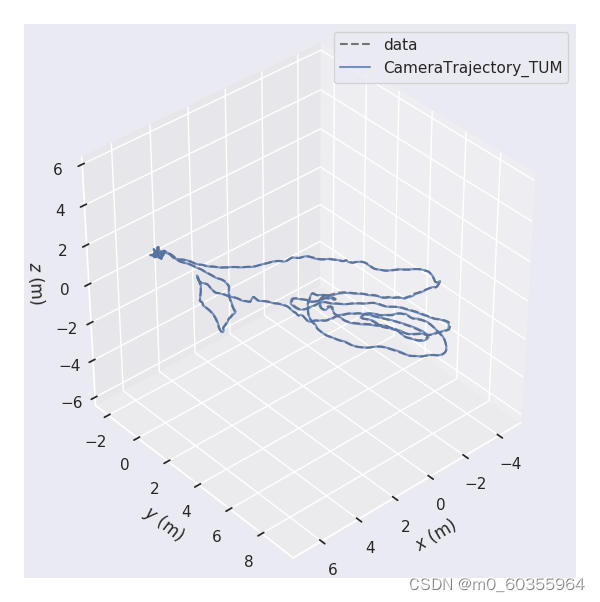
绘制多个轨迹 evo_traj tum CameraTrajectory_TUM.txt groundtruth.txt -p
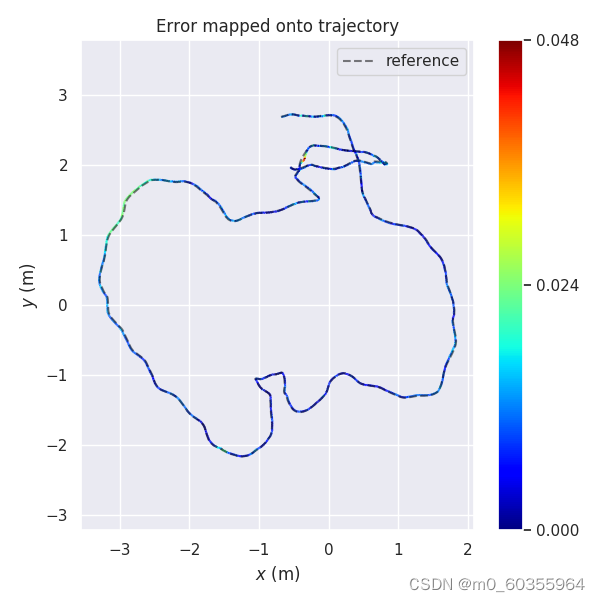
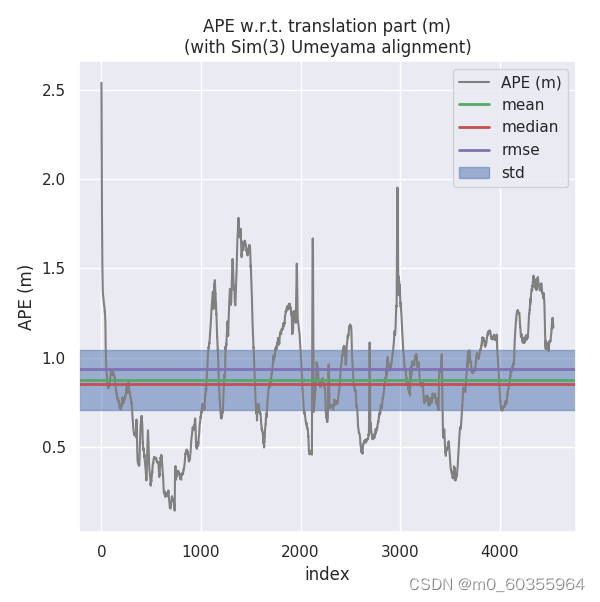
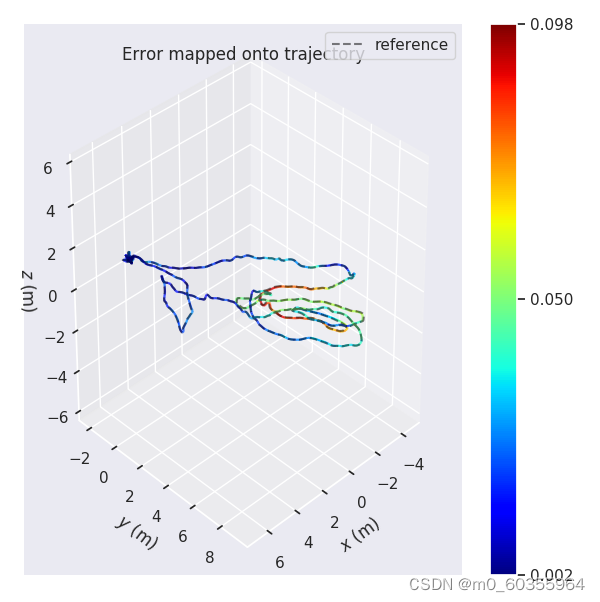
计算绝对位姿误差 大多数中论文的指标为测量绝对误差, 在进行评估时,若经过了缩放,在命令行中应将真实轨迹(参考轨迹)放在估计轨迹(计算轨迹)前方,避免在缩放时参考轨迹错误而造成误差被错误缩放。 evo_ape tum groundtruth.txt CameraTrajectory_TUM.txt -p --plot_mode=xy -asmax:表示最大误差;mean:平均误差;median:误差中位数;min:最小误差;rmse:均方根误差;sse:和方差、误差平方和;std:标准差。
画轨迹 evo_traj tum CameraTrajectory_TUM.txt --ref=groundtruth.txt -p --plot_mode=xy -as
计算绝对位姿误差 在进行评估时,若经过了缩放,在命令行中应将真实轨迹(参考轨迹)放在估计轨迹(计算轨迹)前方,避免在缩放时参考轨迹错误而造成误差被错误缩放。 evo_ape tum groundtruth.txt CameraTrajectory_TUM.txt -p --plot_mode=xy -asmax:表示最大误差;mean:平均误差;median:误差中位数;min:最小误差;rmse:均方根误差;sse:和方差、误差平方和;std:标准差。
ORB-SLAM2以单目模式运行KITTI数据集保存的轨迹文件格式是TUM格式的,使用evo工具不能将KITTI格式的轨迹转换成TUM格式的轨迹,但是能将TUM格式的轨迹转换成KITTI格式的轨迹(参考链接) 使用下面的命令将TUM格式的轨迹转化成KITTI格式的 evo_traj tum KeyFrameTrajectory_TUM.txt --save_as_kitti画轨迹 evo_traj kitti CameraTrajectory_KITTI.txt --ref=00.txt -p --plot_mode=xz -as
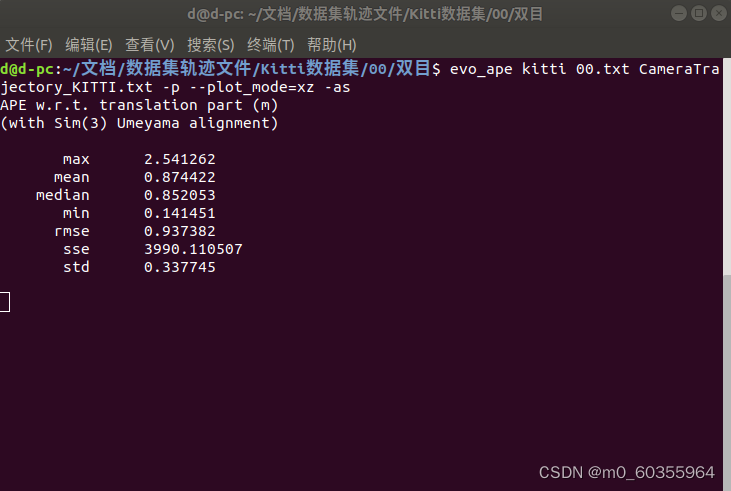
计算绝对位姿误差 在进行评估时,若经过了缩放,在命令行中应将真实轨迹(参考轨迹)放在估计轨迹(计算轨迹)前方,避免在缩放时参考轨迹错误而造成误差被错误缩放。 evo_ape kitti 00.txt CameraTrajectory_KITTI.txt -p --plot_mode=xz -asmax:表示最大误差;mean:平均误差;median:误差中位数;min:最小误差;rmse:均方根误差;sse:和方差、误差平方和;std:标准差。 ORB-SLAM2运行EuRoC数据集保存的轨迹文件格式是TUM格式的,使用evo工具能将EuRoC格式的轨迹转换成TUM格式的轨迹,(参考链接) 使用下面的命令将EuRoC格式的轨迹转化成TUM格式的 evo_traj euroc data.csv --save_as_tum画轨迹 evo_traj tum CameraTrajectory_TUM.txt --ref=data.tum -p -as
计算绝对位姿误差 在进行评估时,若经过了缩放,在命令行中应将真实轨迹(参考轨迹)放在估计轨迹(计算轨迹)前方,避免在缩放时参考轨迹错误而造成误差被错误缩放。 evo_ape tum data.tum CameraTrajectory_TUM.txt -p -asmax:表示最大误差;mean:平均误差;median:误差中位数;min:最小误差;rmse:均方根误差;sse:和方差、误差平方和;std:标准差。 |
 下面以rgbd_dataset_freiburg3_long_office_household数据集为例
下面以rgbd_dataset_freiburg3_long_office_household数据集为例

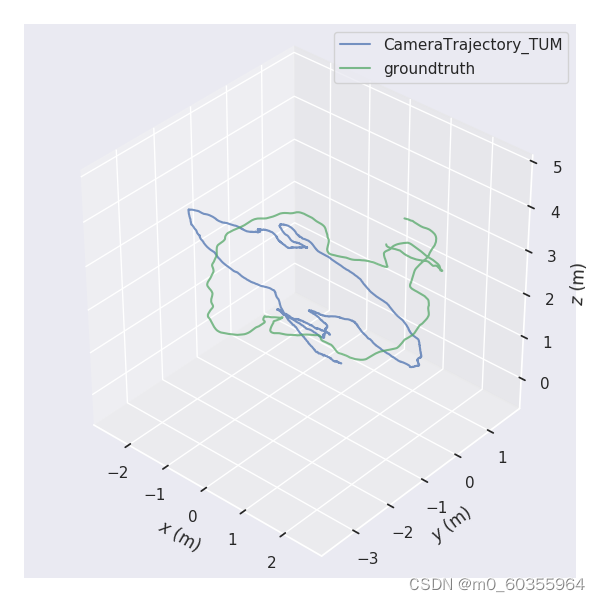 上面的轨迹在旋转和平移上不对齐,可以通过--ref参数指定参考轨迹,并且添加参数-a来对其轨迹
上面的轨迹在旋转和平移上不对齐,可以通过--ref参数指定参考轨迹,并且添加参数-a来对其轨迹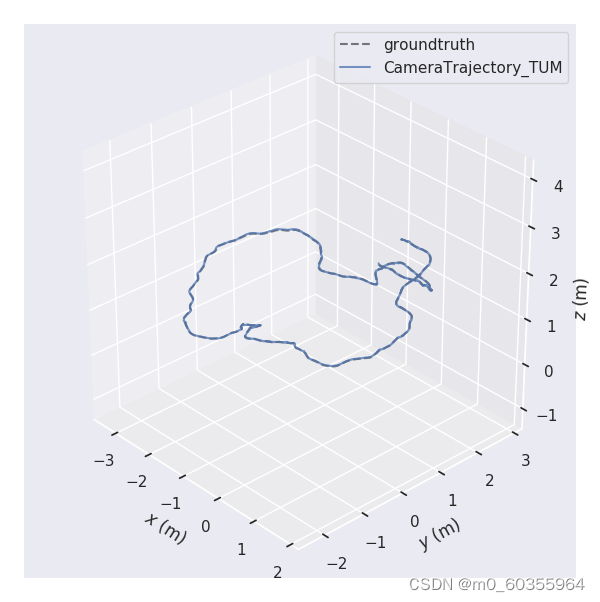 由于单目相机会存在尺度的不确定性,所以在仅使用-a不够
由于单目相机会存在尺度的不确定性,所以在仅使用-a不够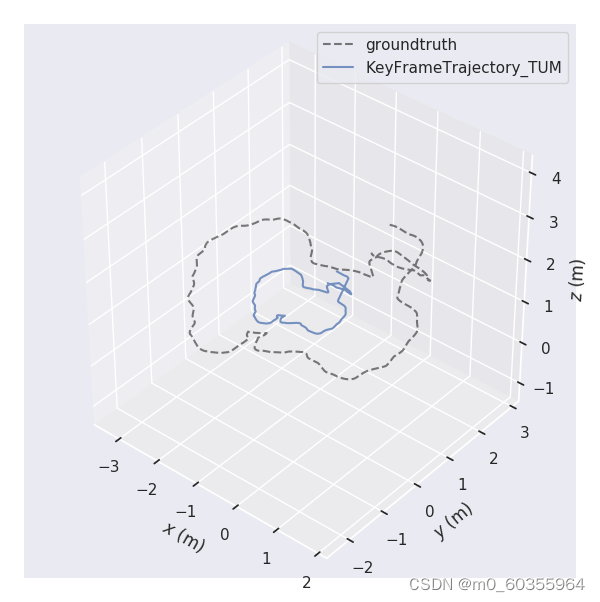 还需要添加一个参数-s进行尺度上面的对齐
还需要添加一个参数-s进行尺度上面的对齐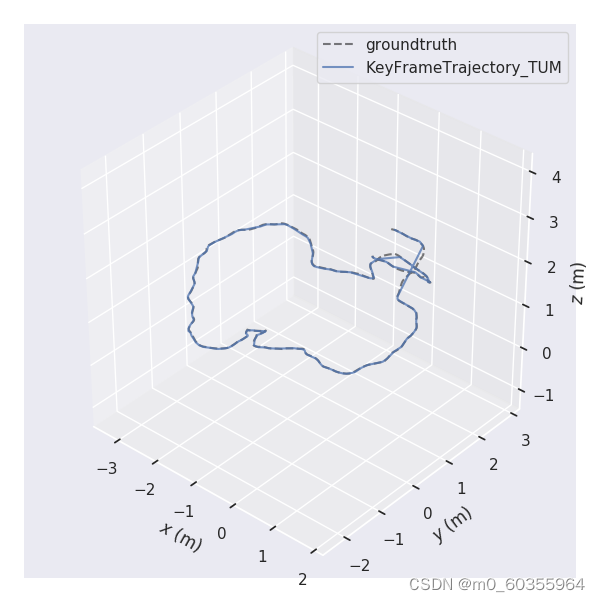 或者直接使用参数-as同时使用旋转和平移以及尺度上面的对齐
或者直接使用参数-as同时使用旋转和平移以及尺度上面的对齐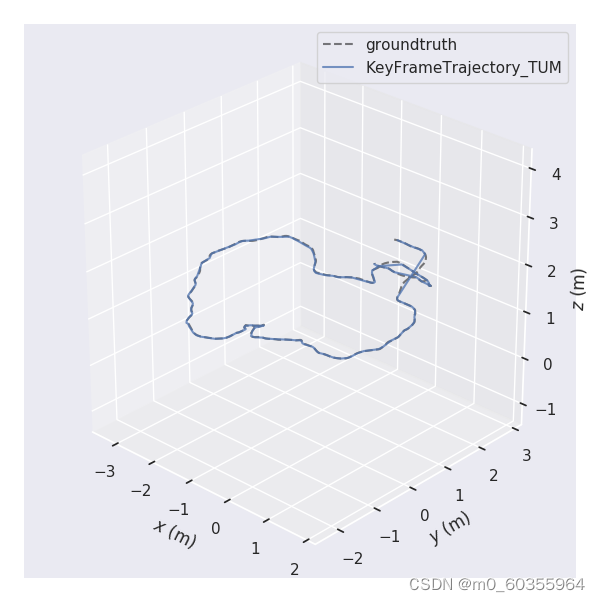 通过观察,上面的轨迹在Z轴上面变化不大,可以添加参数--plot_mode=xy将轨迹压缩在xy平面上
通过观察,上面的轨迹在Z轴上面变化不大,可以添加参数--plot_mode=xy将轨迹压缩在xy平面上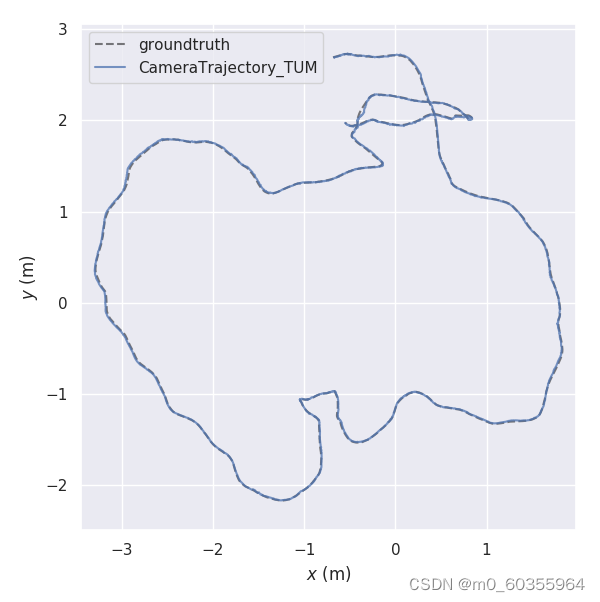 通过上面的过程,我们 常用的画轨迹指令 是
通过上面的过程,我们 常用的画轨迹指令 是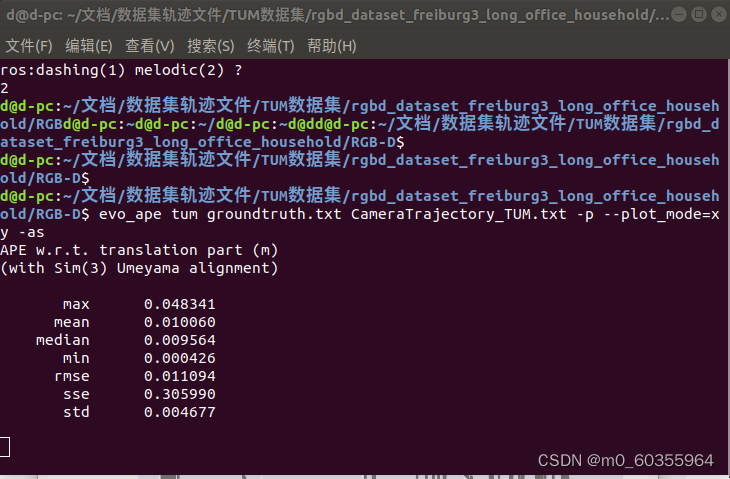

 evo_rpe指令是计算相对位姿误差,参数与上面的计算绝对位姿误差一致,因为不常用,就不介绍了
evo_rpe指令是计算相对位姿误差,参数与上面的计算绝对位姿误差一致,因为不常用,就不介绍了



【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |