乐高wedo2.0第五条小恐龙出击 |
您所在的位置:网站首页 › 双11促销广告文案怎么写 › 乐高wedo2.0第五条小恐龙出击 |
乐高wedo2.0第五条小恐龙出击
|
roboriseit网站对它的介绍:
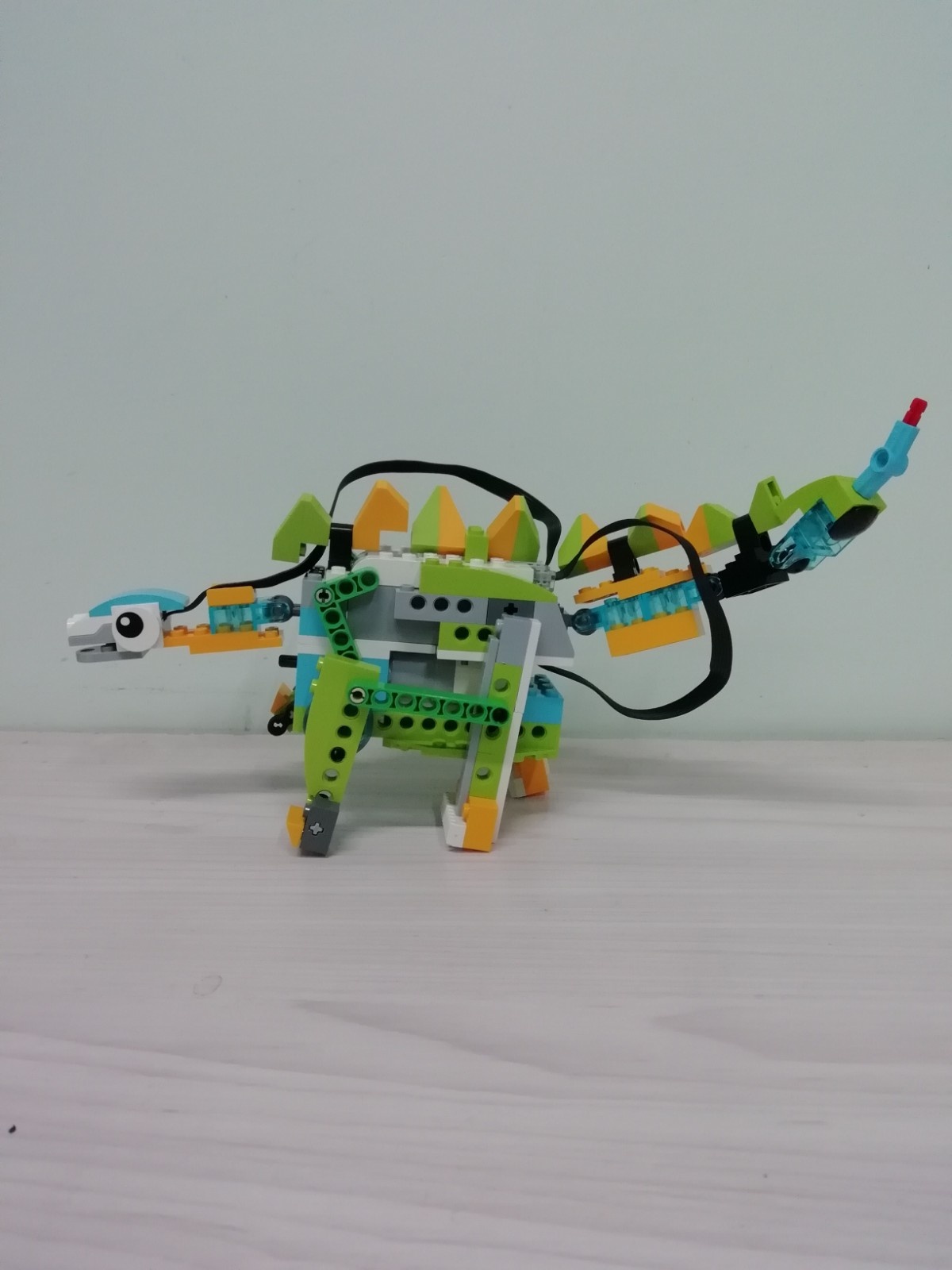
运动方式依旧是传统的单电机四足运动:
那么,我们开始: 先想想 想模仿别人的作品,该如何下手,常规意义上,比较容易下手的,当然是我们能够看到的部分,看不到的部分就自行脑补。有的人搭的多,能够脑补出来,比如我,搭的不多,对零件不熟悉,该怎么办?那就要从结构出来。 我们把它分成几个部分: 1、动力; 2、控制器(身体); 3、四肢; 4、头和尾,还有装饰。 1、动力:基本上的笨拙动物的动力,我们都使用蜗轮箱结构,这样能够做到缓慢,而且力气大。
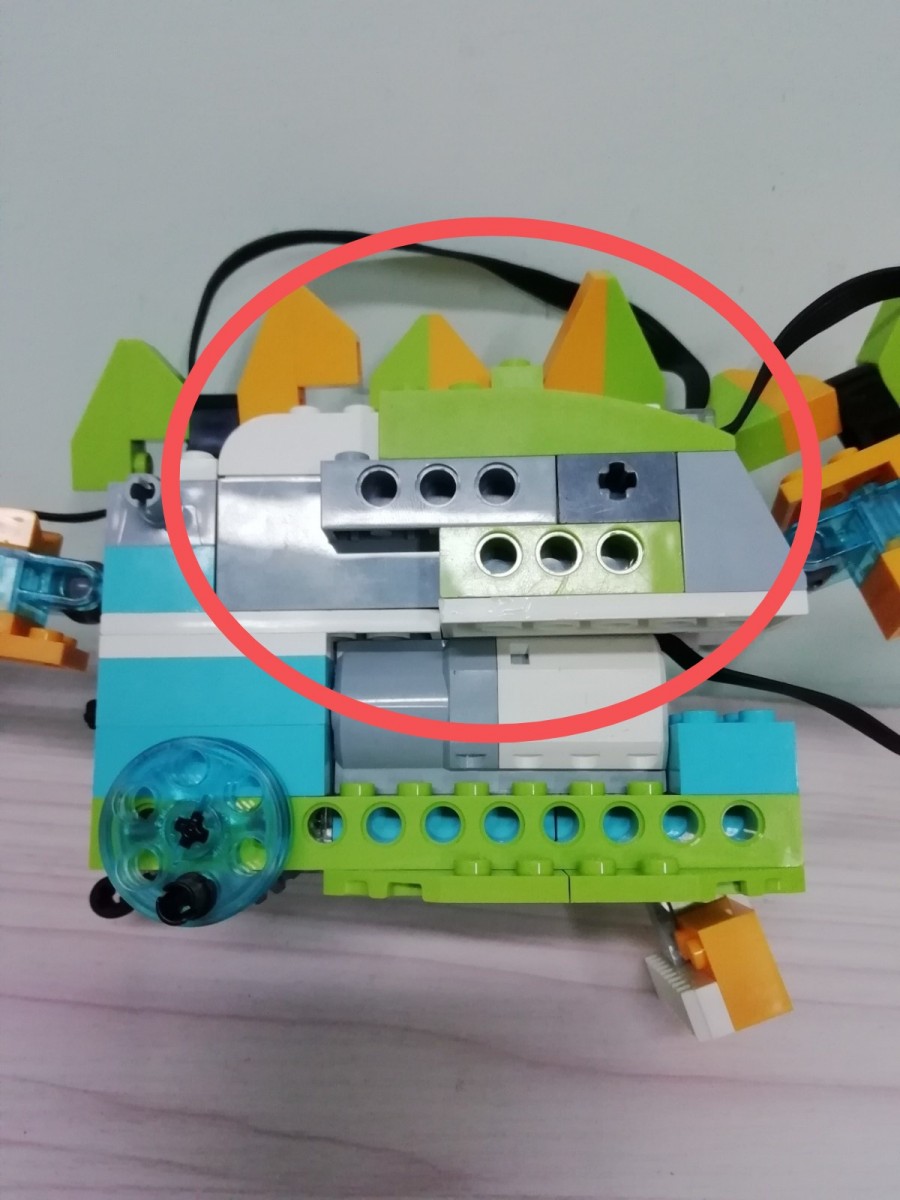
(这次的蜗轮箱是反倒着安装的,所以没法固定在薄片,或者砖块上,只能两边安装积木给它限定位置。) 2、控制器(身体):动力部分安好之后,就可以根据恐龙的形状,找到合适的控制器安放位置:
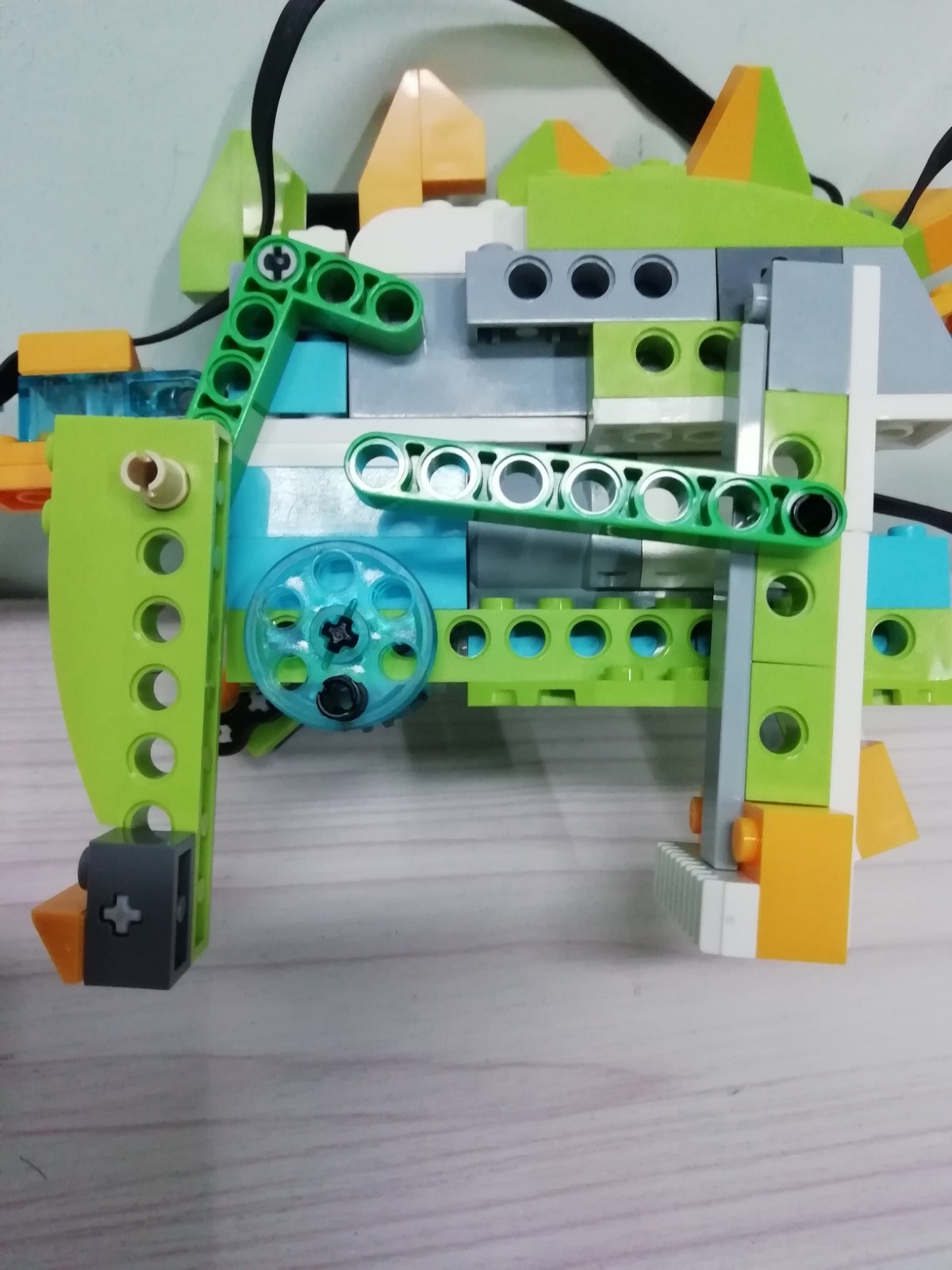
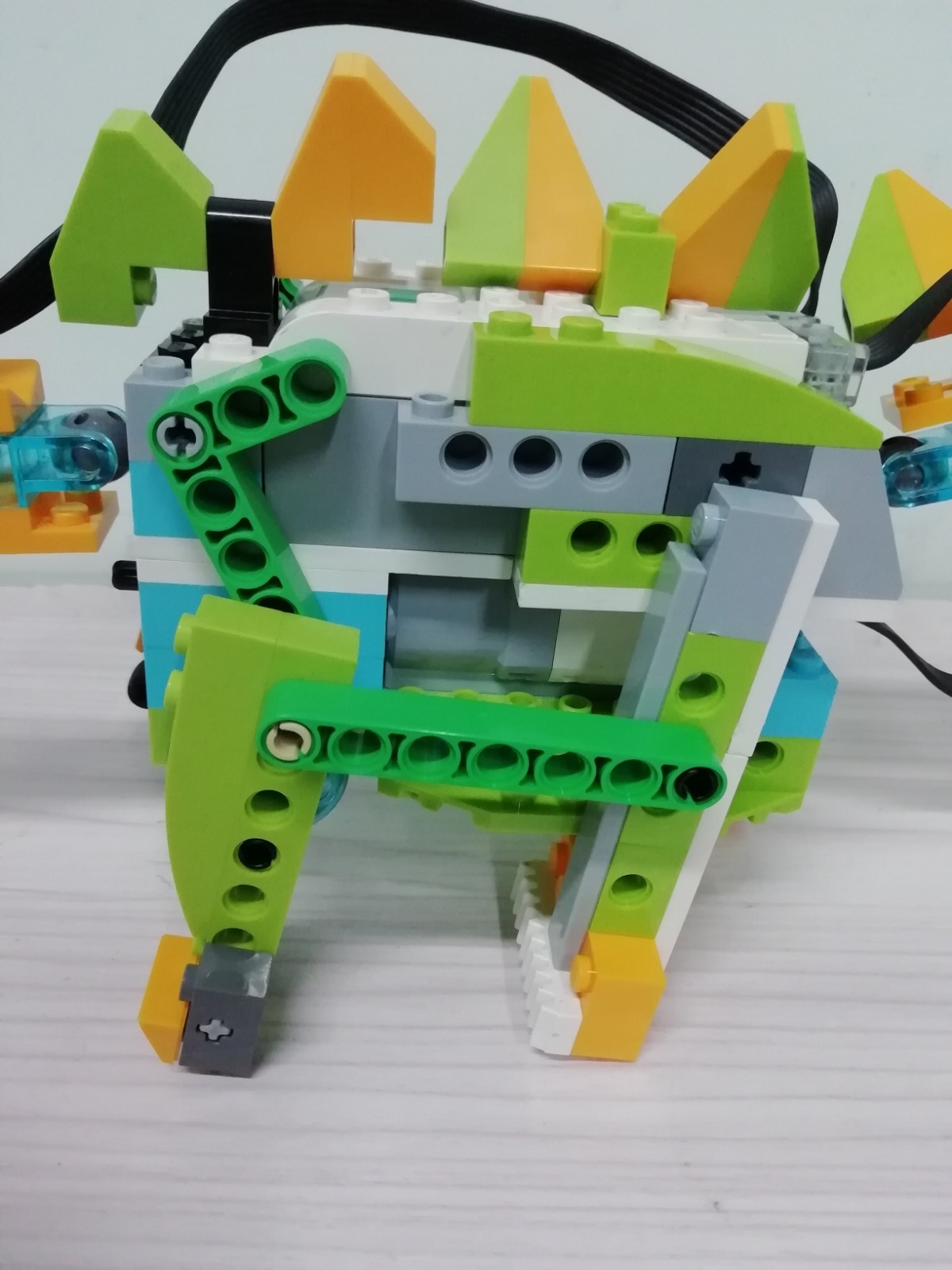
(控制器刚好可以安在电机动力的上方,作为恐龙的背部。) 3、四肢(看看细节搭建吧!):
看看前腿还有后腿的细节安装:
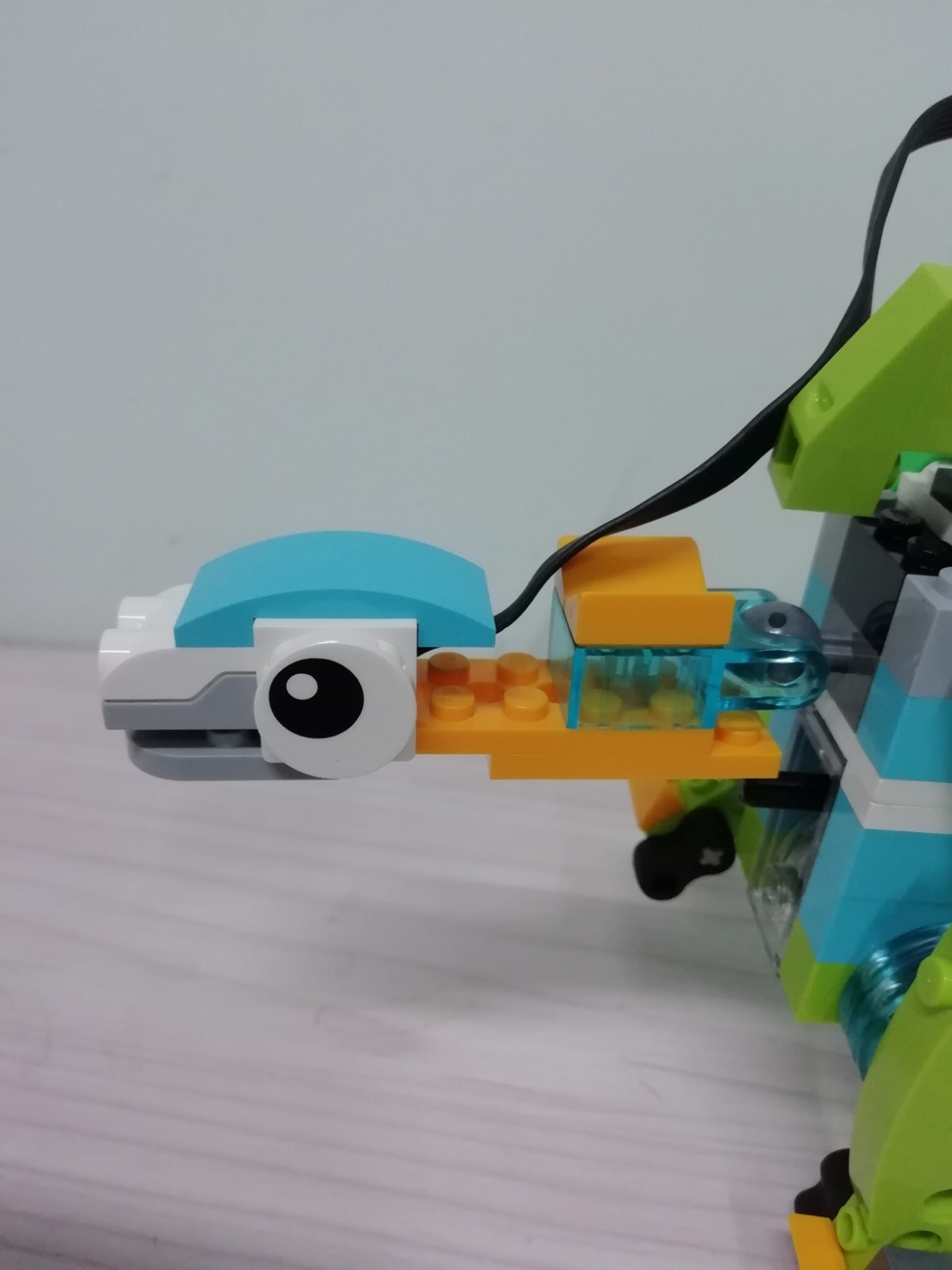
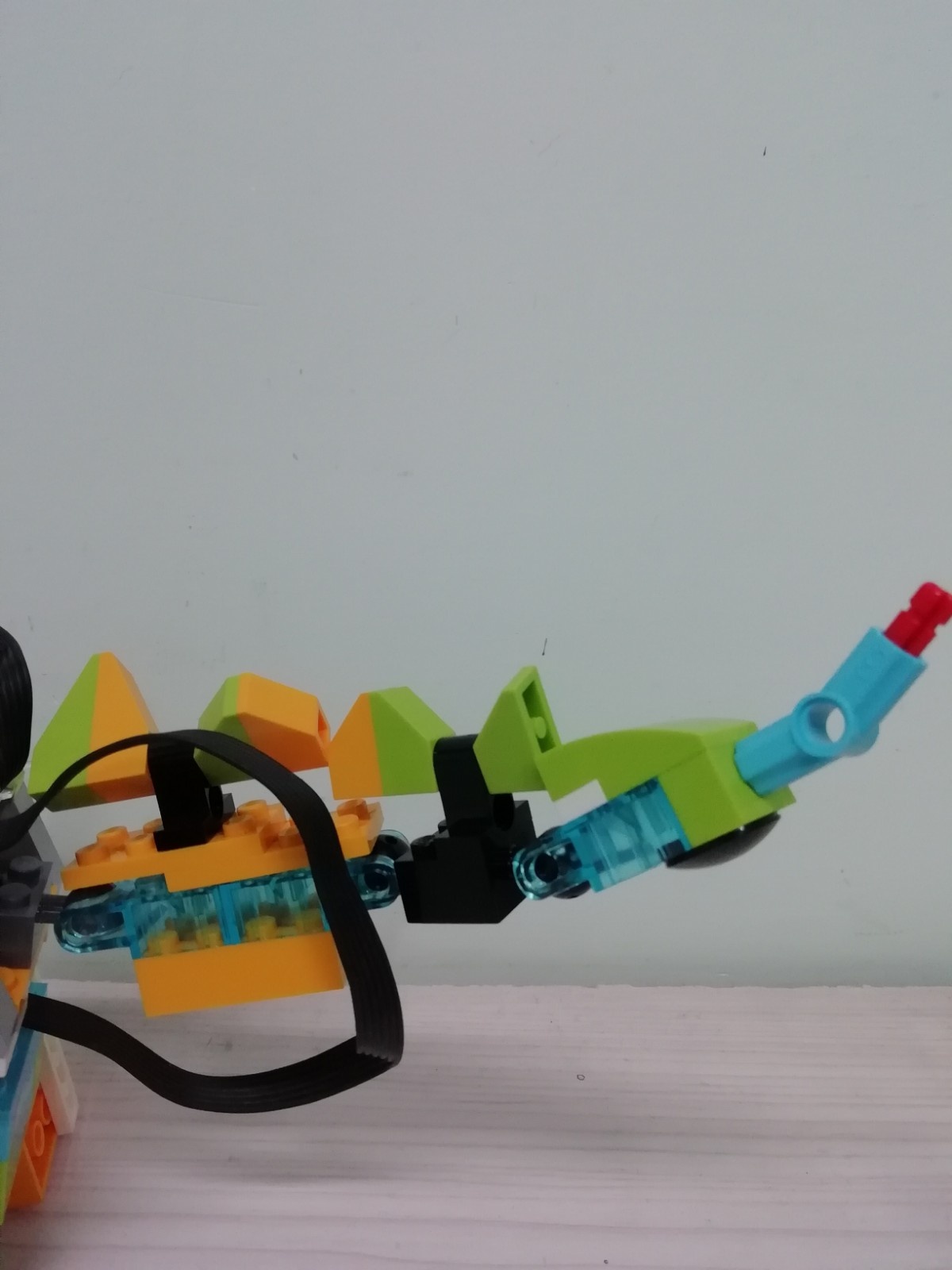
(这里用一个橡皮做脚的目的是增大摩擦力。) 4、最后就是头尾,还有装饰了(这个就是安装手感,还有个人兴趣了,看哪个形状像,就用那个形状吧!):
最后,小恐龙就完成了:
而形象化的表达,形象化的认识,这样思考就会更加全面性。 温馨提示 我会经常分享乐高机器人的案例。分享给其他人一起来顽机器人,想要获得更多搭建案例,喜欢我,请关注我,希望我的内容能对你有帮助。返回搜狐,查看更多 |






 积木相较于美术的表达,使还在更容易的立体空间里面发挥创造力,而不是一张2D的纸。自然发挥想象就更高一个维度。
积木相较于美术的表达,使还在更容易的立体空间里面发挥创造力,而不是一张2D的纸。自然发挥想象就更高一个维度。【本文地址】
公司简介
联系我们
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |