【python 3.7.5 求解二次规划】MATLAB函数quadprog的python 实现 |
您所在的位置:网站首页 › 函数的求解 › 【python 3.7.5 求解二次规划】MATLAB函数quadprog的python 实现 |
【python 3.7.5 求解二次规划】MATLAB函数quadprog的python 实现
|
无意中发现了一个巨牛的人工智能教程,忍不住分享一下给大家。教程不仅是零基础,通俗易懂,而且非常风趣幽默,像看小说一样!觉得太牛了,所以分享给大家。点这里可以跳转到教程。人工智能教程
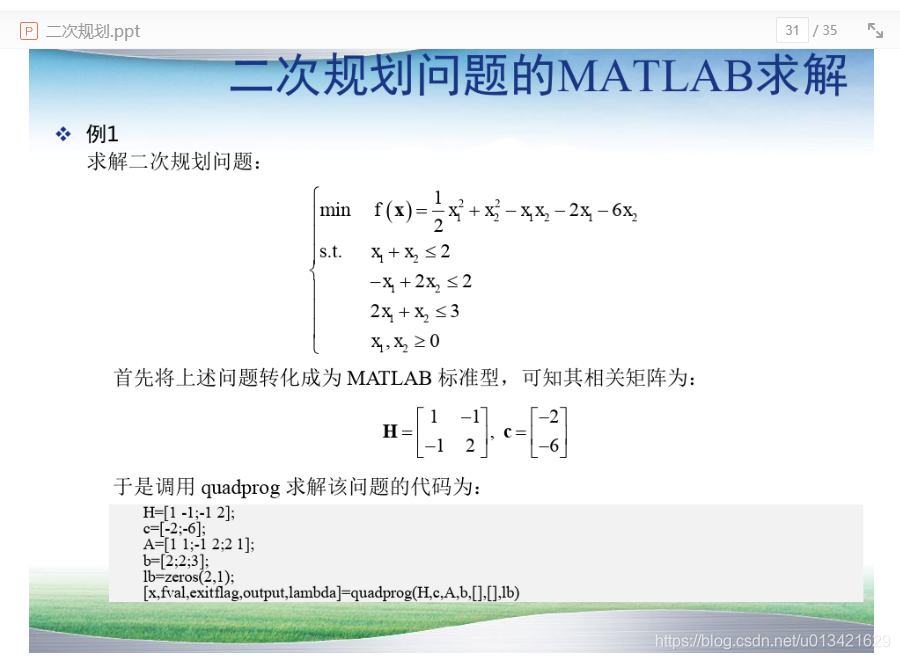
matlab 使用quadprog 函数,求解线性规划,二次规划等问题。那么如何保持跟matlab 相同的参数,python使用习惯呢,下面定义一个函数,符合matlab用户的使用习惯。简单例子如下: import numpy as np import cvxopt def quadprog(H, f, L=None, k=None, Aeq=None, beq=None, lb=None, ub=None): """ Input: Numpy arrays, the format follows MATLAB quadprog function: https://www.mathworks.com/help/optim/ug/quadprog.html Output: Numpy array of the solution """ n_var = H.shape[1] P = cvxopt.matrix(H, tc='d') q = cvxopt.matrix(f, tc='d') if L is not None or k is not None: assert(k is not None and L is not None) if lb is not None: L = np.vstack([L, -np.eye(n_var)]) k = np.vstack([k, -lb]) if ub is not None: L = np.vstack([L, np.eye(n_var)]) k = np.vstack([k, ub]) L = cvxopt.matrix(L, tc='d') k = cvxopt.matrix(k, tc='d') if Aeq is not None or beq is not None: assert(Aeq is not None and beq is not None) Aeq = cvxopt.matrix(Aeq, tc='d') beq = cvxopt.matrix(beq, tc='d') sol = cvxopt.solvers.qp(P, q, L, k, Aeq, beq) return np.array(sol['x']) if __name__ == '__main__': H=np.array([[1,-1],[-1,2]]) print(H) f=np.array([[-2],[-6]]) print(f) L=np.array([[1,1],[-1,2],[2,1]]) print(L) k=np.array([[2],[2],[3]]) print(k) res=quadprog(H, f, L,k) print(res)运行结果: [[ 1 -1] [-1 2]] [[-2] [-6]] [[ 1 1] [-1 2] [ 2 1]] [[2] [2] [3]] pcost dcost gap pres dres 0: -1.1510e+01 -8.7580e+00 3e+00 9e-01 7e-16 1: -9.1195e+00 -8.5750e+00 3e-01 1e-01 2e-16 2: -8.3243e+00 -8.2258e+00 2e-01 3e-02 6e-16 3: -8.2233e+00 -8.2223e+00 2e-03 3e-04 2e-16 4: -8.2222e+00 -8.2222e+00 2e-05 3e-06 2e-16 5: -8.2222e+00 -8.2222e+00 2e-07 3e-08 7e-17 Optimal solution found. [[0.6666667 ] [1.33333334]]参考百度文库:二次规划教程 |



【本文地址】
公司简介
联系我们
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |