【干货】A320飞行操纵系统 |
您所在的位置:网站首页 › 偏航控制器的三个主要功能 › 【干货】A320飞行操纵系统 |
【干货】A320飞行操纵系统
|
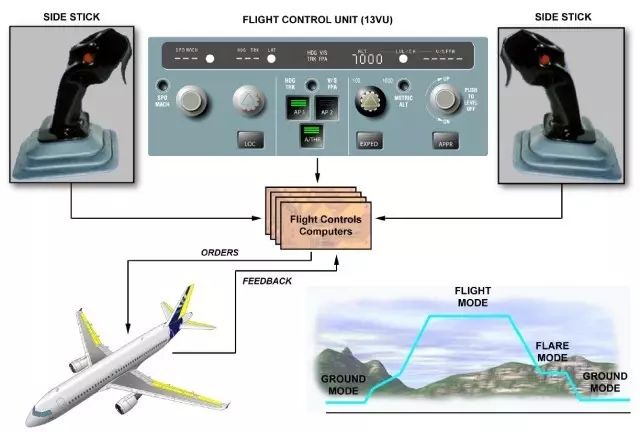
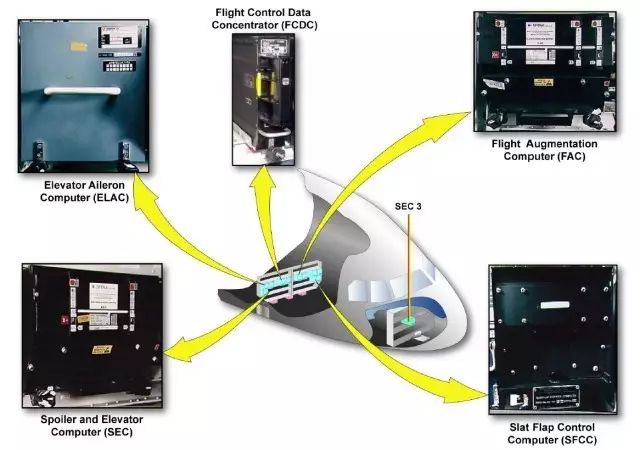
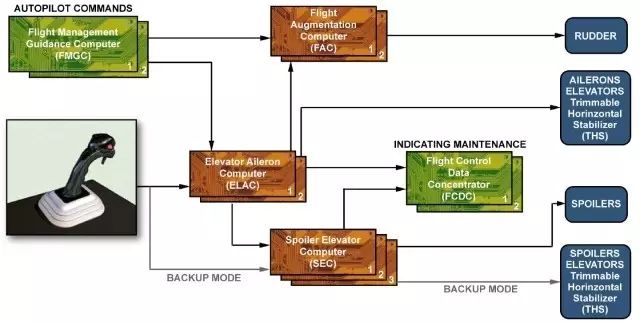
飞行操纵计算机介绍
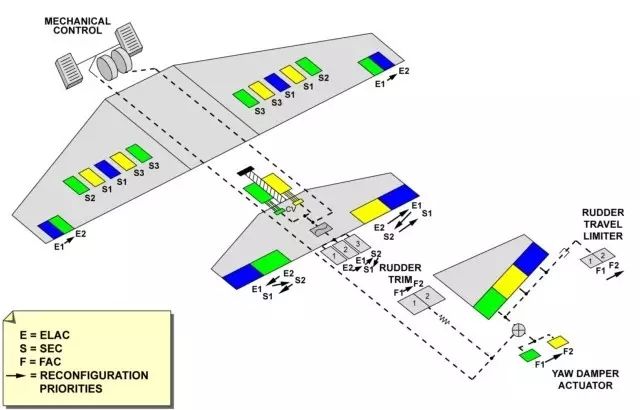
7个飞行操纵计算机根据正常、备用或直接法则处理飞行员和自动驾驶的输入,计算机有: 2个 ELACs (升降舵副翼计算机) 提供: 正常升降及安定面控制副翼的操纵。 3 个SECs (扰流板升降舵计算机)提供: 扰流板的操纵。 备用升降舵和安定面控制。 2 个FACs (飞行增稳计算机)提供: 方向舵电动控制。 另外的2个FCDC(飞行操纵数据集中器)从 ELAC (升降舵副翼计算机)和 SEC (扰流板升降舵计算机)获得数据并将数据送至 EIS (电子仪表系统)和 CFDS (中央故障显示系统)。
*飞行操纵系统控制逻辑
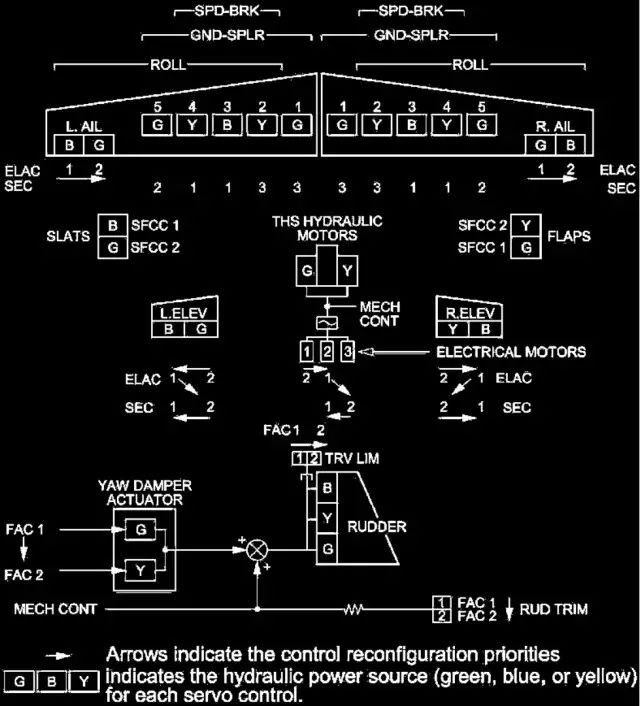
A320飞机所有操纵面都需要液压驱动控制(G/B/Y)。并且每个飞行操纵计算机和液压作动筒之间有着默认的对应关系。
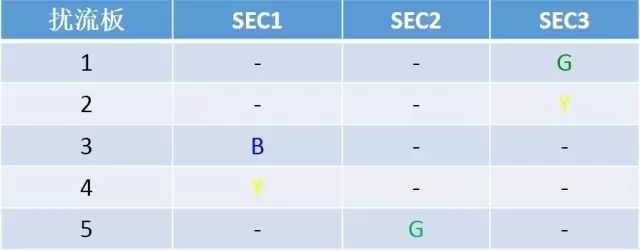
【表1】扰流板控制逻辑
每块扰流板都由一个伺服传动装置来定位。每个伺服传动接收分别来自于G、 B或Y液压系统的动力,由SEC1、2 或3 来控制。当相应的计算机出现故障或失去电控时,扰流板自动收至0位。在液压供给失效的情况下,扰流板保持在失效时的偏转位置,或如果在空气动力的推动下,保持在较小的位置。当一个机翼上的扰流面失效时,另一个机翼上相对称的扰流板被抑制。 【表2】副翼控制逻辑
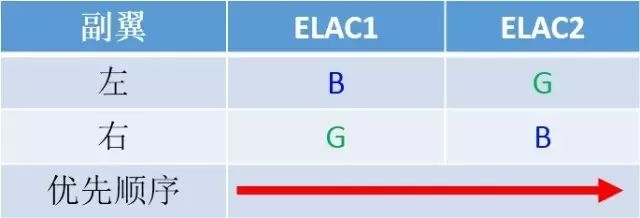
每个副翼有两个电动控制的液压传动装置。其中只有一个工作。 每个伺服传动装置有 2 种控制方式: 现用: 传动装置的位置是电动控制的。 阻尼: 传动装置随舵面运动。 如果两部 ELAC 故障或蓝色和绿色液压系统低压,系统自动选择阻尼方式。 【表3】升降舵控制逻辑
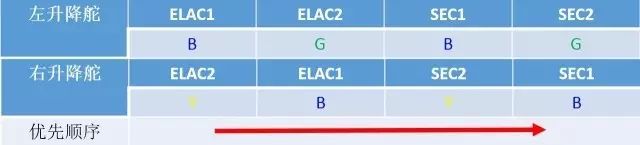
两个电动液压伺服传动装置驱动每个升降舵。 每个伺服传动装置有 3 种控制方式: 现用: 传动装置由电动控制的。 阻尼: 传动装置随舵面运动。 定中: 传动装置由液压保持在中立位置。 正常工作中:一个传动装置在传动方式,另一个在阻尼方式。某些机动飞行引起第二个传动装置传动。 如果工作的伺服传动装置失效,阻尼的传动装置开始工作,而失效的传动装置自动转换为阻尼方式。 如果两个伺服传动装置都不是电动控制,它们将自动转换为定中方式。 如果两个伺服传动装置都不由液压操纵,它们将自动地转换至阻尼方式。 在一个升降舵失效的情况下,另一升降舵的偏转角度受限制,以避免在水平安定面或机身后部施加过大的不对称载荷。 【表4】水平安定面控制逻辑
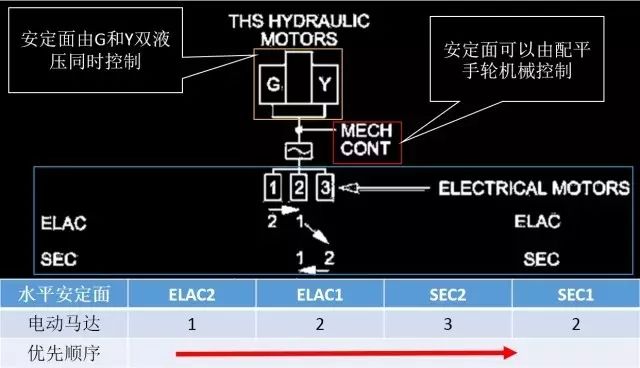
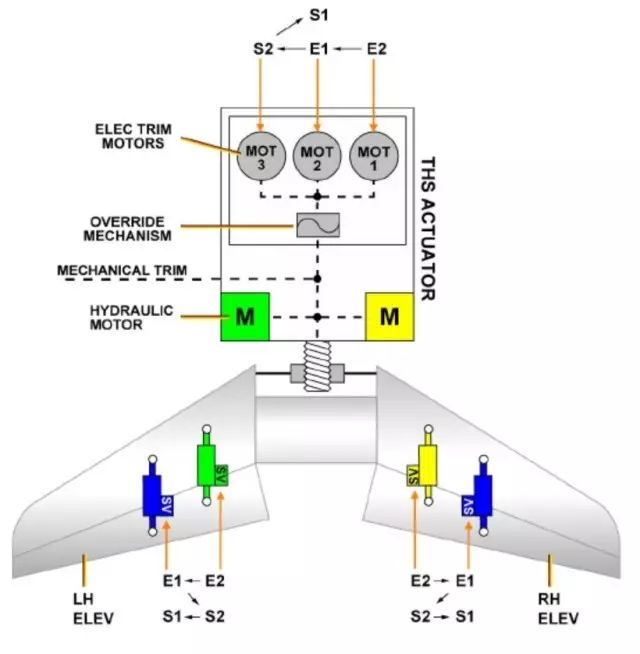
水平安定面由两个液压马达驱动的一个螺旋起动器驱动。 这两个液压马达由下列控制: • 3个电马达中的一个,或 • 机械配平轮。
水平安定面的电动控制: 飞行操纵计算机只是将控制指令传递给电动马达。由电动马达控制液压伺服传动装置工作。并且是G和Y双液压同时工作。 【表5】方向舵(偏航阻尼,配平)控制逻辑
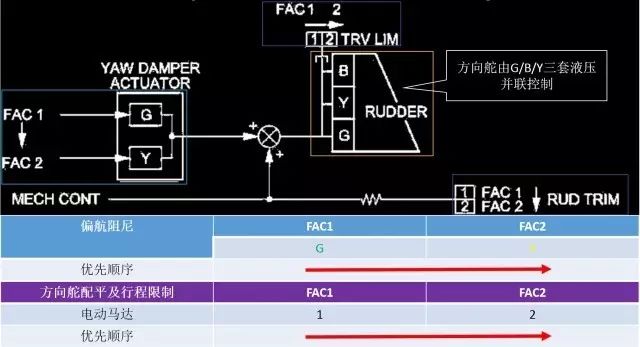
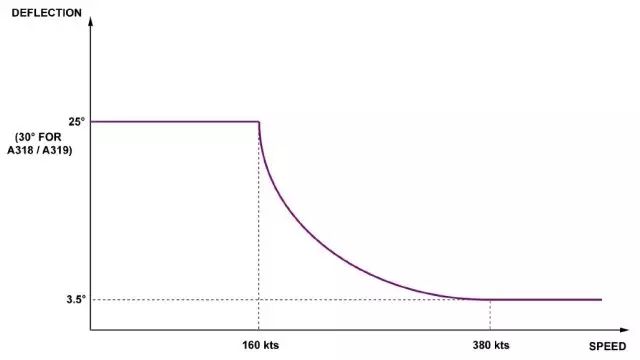
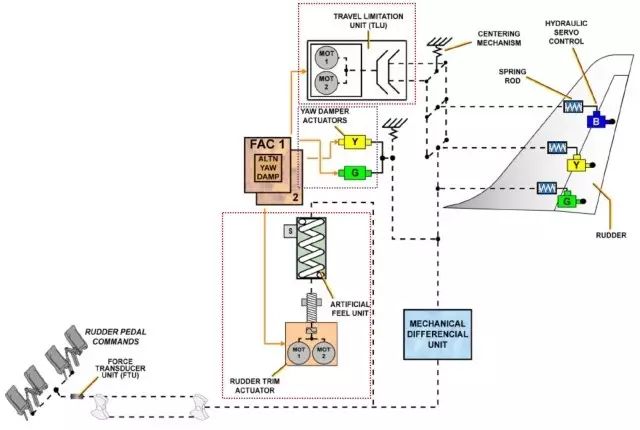
方向舵由3个独立的液压传动装置来作动,液压传动装置并联工作。 在自动工作时(偏航阻尼,协调转弯)三个液压伺服传动装置由一G液压系统伺服作动器驱动。一个Y液压系统伺服作动筒保持同步并且将在绿色伺服作动器失效时接替工作。 偏航阻尼和协调转弯功能不向方向舵脚蹬提供反馈。 方向舵行程极限由FAC通过控制相应的电动马达完成。并且随着飞机速度增加,方向舵行程极限会逐步减小,以避免结果载荷:
如果出现导致方向舵行程限制系统失去的失效情况,方向舵偏转限制就停在最后达到的值上。缝翼伸出时,全方向舵行程权限得以恢复。在所有情况下,可用的方向舵偏转在整个飞行包线内提供足够的偏航控制。包括最大不对称推力的情况。 方向舵配平是由两个给人工感觉组件定位的电动马达完成的。在正常工作时,1号马达( 由FAC1控制)为配平提供动能, FAC2 与2号马达作为备用而保持同步。
【表6】襟翼/缝翼控制逻辑
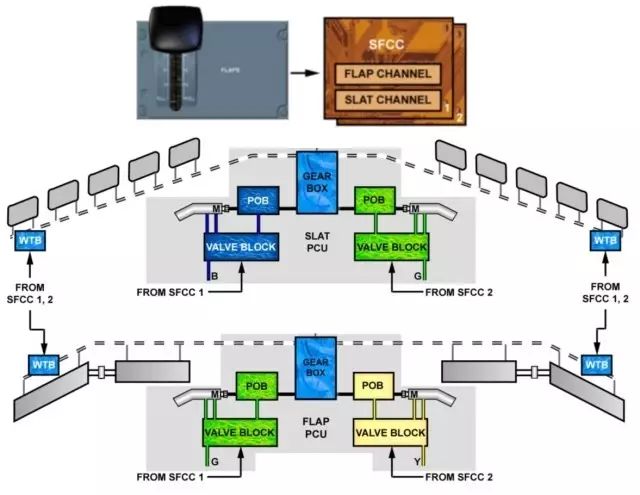
襟翼系统有两个缝翼襟翼控制计机(SFCC),每个计算机包含一个襟翼通道和一个缝翼通道。缝翼由B和G双液压控制;襟翼由G和Y双液压控制。
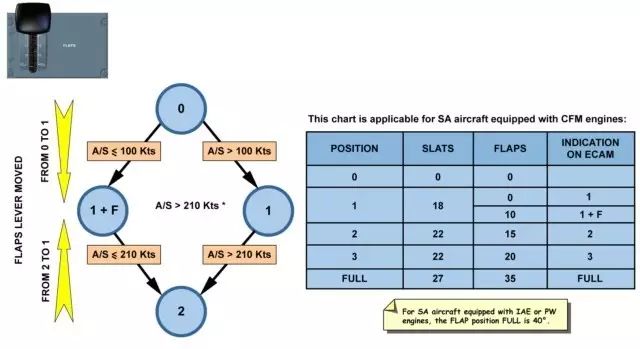
翼尖刹车(WTB)在不对称、超速、对称失控或非指令移动的情况下开始工作。它们在飞行中不能松开。B和G液压系统提供给缝翼和右机翼襟翼的制动器控制,B和Y液压系统提供左机翼襟翼的制动器控制。 注: 如果襟翼翼尖制动器接通,仍可操作缝翼,如果缝翼翼尖制动器接通,仍可操作襟翼。如果一个SFCC失效,那么缝翼和襟翼将以半速工作。如果一个液压系统失效,相应的操纵面以半速度工作。 襟翼手柄有 5 个位置:0, 1, 2, 3和FULL 两个形态与位置 1 相对应:形态 1 和形态 1+F。按如下方式选择:
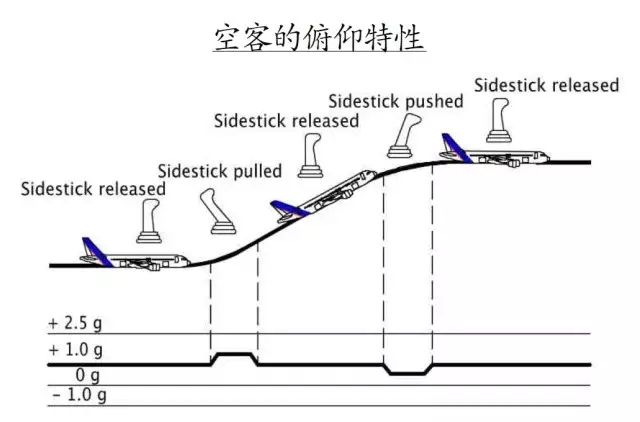
在大迎角和低速度时该功能抑制缝翼收回。 缝翼襟翼控制计算机 (SFCC)使用修正的迎角或 ADIRU 获得的空速信息 来抑制缝翼收回。 如果迎角超过 8.5 ° 或速度降至低于148 kt,抑制从位置 1 收到 0。如果迎角低于 7.6 ° 或当速度超过 154 kt 时,解除抑制。该功能在下列情况下不工作: 手柄选择在 0 位以后,迎角超过 8.5 ° 或速度低于148 kt 。 飞机在地面,速度低于 60 kt 。 总结 A320是第一个使用电传操纵的民用机型。7部飞行操纵计算机控制飞机的飞行状态,冗余度相对较高,所有操纵面都需要液压控制。对于扰流板,副翼和升降舵,每个舵面只有一个液压作动器工作。其他处于备用(阻尼)状态;对于水平安定面是G和Y双液压同时控制;对于方向舵是G/B/Y三液压并联控制;对于襟翼是G和Y双液压同时控制,对于缝翼是G和B双液压同时控制。计算机在控制液压作动器(或电动马达)时是按照一定优先顺序进行的。当现用计算机(或液压作动器/电动马达)失效时,按照优先权逻辑依次重新分配计算机控制。 如果多个计算机或液压失效,就会导致飞行操纵能力的降级。空客由此定义出了不同的飞行操纵法则。 摘要 PF施加于侧杆上的力与飞机的反应之间的关系被称作操纵法则。该关系确定飞机的操纵特性。 操纵法则有三套,并且是根据以下设备的状态来提供的:计算机,外围设备和液压系统。 这三套操纵法则为: • 正常法则 • 备用法则 • 直接法则。 除此之外,还有机械备份法则和非正常姿态法则。 机械备份法则: 目的是在 MMEL 放行条件下实现所有安全目标——管理临时和完全失去电气、临时失去五个电传计算机、失去两个升降舵或完全失去副翼和扰流板。必须知道由于电传的结构,使用机械备份的情况是极不可能。 非正常姿态法则: 不管什么原因,如果飞机大大超出了正常飞行包线并到达非正常姿态,则正常操纵会改变并给 PF 提供最大效率来重新获得正常姿态。 正常法则 正常法则的目的在于提供在正常飞行包线范围内的操纵特性(与飞机速度、高度、全重和CG无关): • 飞机必须稳定并具备机动性, • 飞机在同样条件下的反应必须相同, • 侧杆上的动作必须与飞机的俯仰和横滚相匹配。 飞机包线限制内,正常法则的操纵特性为: • PF全权控制飞机到最大性能 • 在紧急情况下PF可以本能/立即采取动作, • 减少操纵过度或飞机承受过大荷载的可能性。 俯仰特性 在空中PF进行侧杆输入时,会指令飞机进行一个恒定载荷的机动,飞机用载荷/俯仰速率进行反应。因此, PF的指令与飞机的预期“自然”反应相一致:低速时根据俯仰速率机动,高速时根据飞行航径速率或载荷机动。因此,如果侧杆上没有输入: 即使速度改变,飞机也保持飞行航径。如果形态改变或推力变动,飞机将补偿俯仰力矩效应。颠簸时,飞行航径出现小幅偏差。但是,飞机仍趋向于重新获得稳定的状态。
操作建议 如果飞机偏离其计划的飞行航径,飞机稳定并自动配平后,PF只需在侧杆上进行小的修正。 PF不应抵抗侧杆力或操纵过量。如果 PF 怀疑操纵过量,则应该松开侧杆。 起飞和着陆 上述俯仰法则不是起飞和拉平阶段最适当的法则,因为PF一般不会预期有稳定的飞行航径。 因此,计算机自动调整操纵法则以适应下列飞行阶段: • 地面法则:操纵法则是直接法则 • 拉平法则操纵法为俯仰需求法则。 操作建议 起飞和着陆机动自然完成。例如,拉平要求 PF在侧杆施加持续向后的力量以获得渐进的拉平。而放前轮动作要求在侧杆上施加轻微向后的力量来柔和放下前轮。 水平特性 当PF操纵侧杆做横向动作时,会给出飞机横滚速率,飞机按横滚率增加坡度转弯。 因此,在坡度角小于33 °、侧杆上无操纵力时,指令零横滚速率,飞机保持当前坡度角。从而,飞机在横侧方向上是稳定的,无需进行副翼配平。 然而,横向法则也是横滚和偏航指令的混合加上: ‐ 自动转弯协调, ‐ 自动偏航阻尼, ‐ 飞机出现大的不平衡时偏航阻尼器的起始反应。 另外,如果坡度角小于33 °,飞机自动提供俯仰补偿。如果坡度角大于33 °,会重新获得螺旋稳定性,同时俯仰补偿不再可用。这是因为,在正常情况下不会有操纵方面的原因要求使用这样的大坡度角长时间飞行。
操作建议 在平飞正常转弯时(坡度角小于33 °): • PF水平操纵侧杆(侧杆水平移动量越大,导致的横滚速率就越大,例如:最大偏转量为每秒15 °/s), • 无需进行俯仰修正, • 无需使用方向舵。 在进行大坡度转弯时(坡度角大于33 °),PF必须: • 在侧杆上施加水平压力以保持坡度。 • 在侧杆上施加向后的压力保持平飞。 发动机失效 在飞行中,如果发动机失效且侧杆无操纵,则横向正常法则会控制飞机横滚和偏航的自然趋势。 如果侧杆上无输入,飞机会达到大约5 ° 的恒定坡度角、恒定侧滑和缓慢偏侧的航向率。 飞机的横向动作是安全的。 然而,PF应按需使用横向配平技术。就性能而言,起飞单发最有效的飞行技巧为保持一稳定的航向同时保持横滚操纵面不放出。这种技术决定了所需的方向舵量及随之产生的剩余侧滑。 因此,为了显示单发起飞时飞行所需的方向舵量,PFD上计算的侧滑指数会替换为计算的剩余侧滑值。该指数用蓝色而不是黄色的β目标值显示。 如果PF蹬舵使β目标回中,那么PF将使用单发所要求的剩余侧滑飞行。于是飞机便保持稳定的航向飞行,同时副翼和扰流板接近中立。
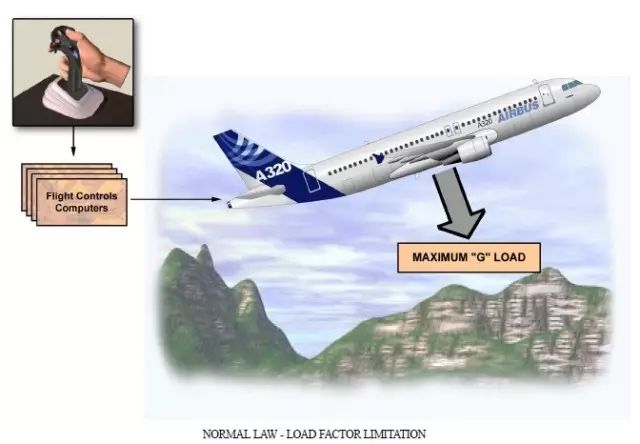
操作建议 起飞时若出现单发,PF必须: • 柔和调整俯仰以保持安全速度(按SRS引导) • β目标回中(动作无需紧急,因为飞机的横向状态是安全的) • 适当时,使用方向舵脚蹬横向配平飞机。 • 使用少量横向侧杆输入,使飞机朝恰当的航向飞行。 正常法则提供五种不同的保护: • 大迎角保护 • 载荷系数保护 • 大俯仰姿态保护, • 坡度角保护, • 大速度保护。 正常法则下的五种保护 目的 PF的主要任务之一是将飞机保持在正常飞行包线范围内飞行。但是,由于出现极端的状况或飞行员错误处置,在某些情况下,可能超过这些限制。 飞机虽有保护,但PF不得有意超出正常飞行包线范围。另外,这些保护也并非用于进行结构限制保护(如,相反的方向舵输入)。其设计目的在于出现紧急情况和压力很大的情况时协助PF,该状态下只有本能快速的反应有效。 保护的目的在于:给PF提供在极端条件下让飞机持续达到最佳性能的全部权限,减小操纵过量或是飞机超负载的危险,给PF提供本能和立即实施的程序以确保PF取得可能的最佳结果。 载荷保护
商用飞机由于潜在的冲突或CFIT等而进行规避机动时,载荷系数可能较高。 如果随后的机动真能按照该载荷数值进行,则拉杆有效。如果飞机无法按照该轨迹飞行或无法进行该机动,则拉杆有害。 商用飞机结构允许的最大载荷是: • 光洁形态下, 2.5 g • 襟翼放出时是 2.0 g 在大多数的商用飞机上,进行 2.5 g 的有效机动的可能性非常小。而且,驾驶舱内没有持续提供载荷系数的信息,航空公司的飞行员并不习惯控制该参数。这在飞行经验中得到进一步的证明,揭示了:在紧急情况下,PF对操纵杆或侧杆的初始反应较为犹豫,然后变得迅猛。 在载荷系数的保护下,PF 可立即并且本能地向后拉侧杆到底:飞机开始会立即以 2.5 g 机动飞行。然后,如果因为危险仍然存在而PF 必须保持拉侧杆到底,则大AOA 保护将代替载荷系数保护。载荷系数保护增强了该大AOA 保护。 载荷系数保护可使 PF立即反应,不对飞机造成任何过载的危险。 飞行经验还表明:2.5 g 的立即反应提供了比迟疑并滞后(延迟2秒)的大载荷系数机动更大的越障。 大速度保护
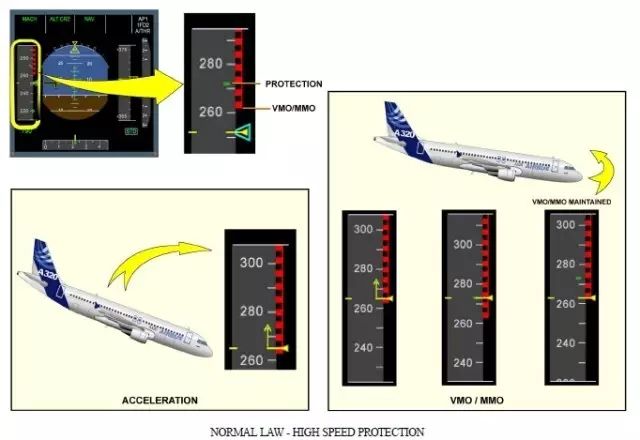
当以超过最大设计速度VD/MD(该速度大于VMO/MMO)飞行时,由于气流载荷大,飞机操纵的难度和飞机结构损坏的可能性都将加大。因此,VMO/MMO和VD/MD间的裕度必须足够大,这样在任何可能超出正常飞行包线范围时都不会导致大的问题。 为保护飞机,在俯冲或垂直操纵异常时,高速保护给侧杆增加了一个正的机头向上的指令。这就减小了VMO/MMO和VD/MD之间的裕度。 因此,在俯冲状态下: • 如果侧杆没有输入,飞机飞行将轻微超过VMO/MMO ,然后飞回正常飞行包线范围。 • 如果侧杆保持前推到底,飞机将超过VMO/MMO 较多,但未达到VD/MD。大约在 VMO +16 / MMO +0.04 时,低头效能逐渐减小至零(这并不意味着飞机稳定在此速度)。 大俯仰姿态保护
过大的俯仰姿态导致危险的情况(由非正常姿态或不正确的机动引起的): • 机头向上姿态过大▸快速损失能量 • 机头向下姿态过大▸ 快速获得能量 另外,不存在需要以过大姿态飞行的紧急情况。基于这些原因,俯仰姿态保护将俯仰姿态限制为+30 °/-15 °之间。 俯仰姿态保护增强高速保护、大荷载因数保护和大AOA保护。 大迎角(AOA)保护
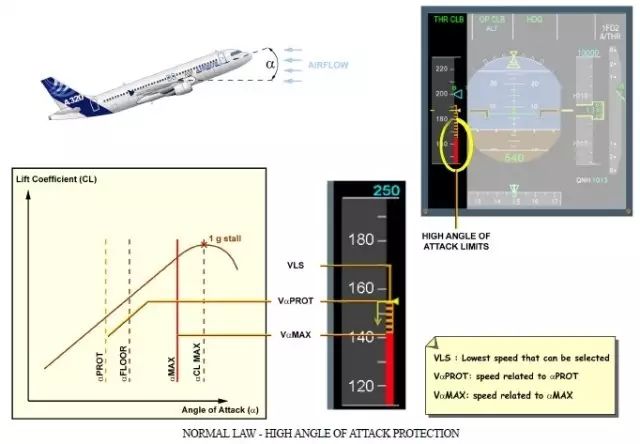
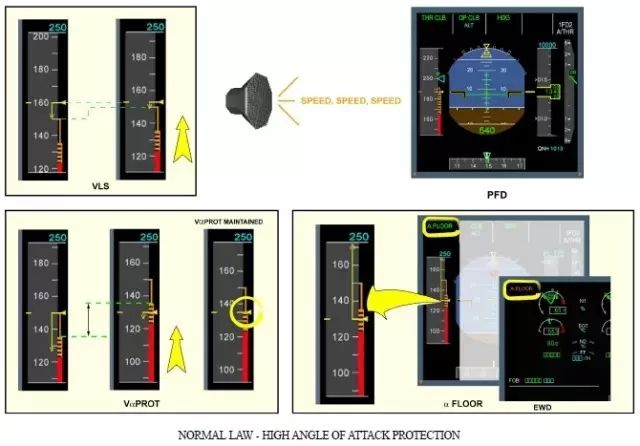
大迎角(AOA)保护使PF可以在危险情况下将侧杆向后拉到底以持续达到可能的最佳飞机升力。在侧杆上的动作是本能的,大迎角(AOA)保护使失速或失去控制的危险减至最小。 大迎角(AOA)保护为空气动力保护的一种: • 若有任何原因导致飞机超出正常飞行包线,PF将会察觉,因为自动俯仰配平停止,飞机将下沉以保持当前的AOA(α保护,静安定性强),反应将明显改变。
• 如果PF接着将侧杆向后拉到底,则指令一个最大AOA(大致与最大爬升迎角一致)。另外,减速板(若伸出)将自动收上。 除了该空气动力保护外,还有另外三种能量功能: • 如果A/THR处于速度方式,即使目标速度小于VLS,速度也不会小于VLS。 • 一个低能音响警告“SPEED SPEED SPEED”警告飞行员飞机能量水平已经低于临界值,必须通过俯仰控制增加推力以恢复正的飞行航迹角。它在CONF 2,CONF 3 和 CONF FULL 中可用。
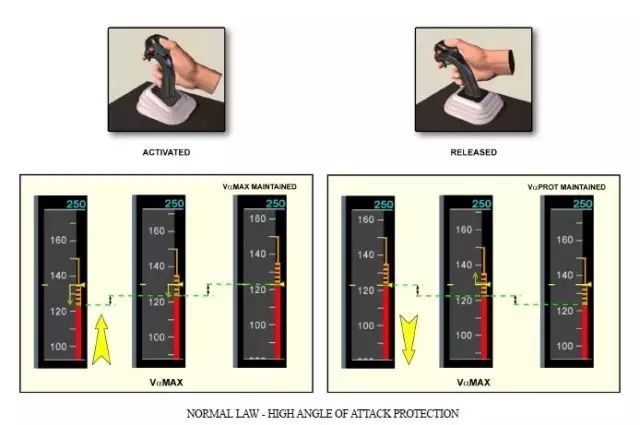
能量水平由 FAC 依据下列输入信号计算: ‐飞机形态 ‐水平减速率 ‐飞行航径角 在紧急情况下,如风切变或CFIT,PF通过下列设备得到援助以使飞机性能最佳化: • 自动推力:增大推力以保持速度大于VLS • 低能量警告“SPEED, SPEED, SPEED”:增强 PF 的意识 • α平台:提供TOGA推力, • 大迎角(AOA)保护:提供最大的空气动力升力 • 自动收回减速板:最大限度减小阻力。 操作建议 在以αmax速度飞行时,必要时 PF 可进行柔转弯。 除了短时间内要求最大机动速度之外,PF不能有意在迎角保护范围内飞行。 如果意外进入迎角保护范围,PF必须尽快退出。将侧杆向前松开以减小迎角,同时增大推力(如果α平台尚未启动或已被取消)。如果α平台已启动, 必须在恢复安全速度后尽快按压推力手柄脱开按钮(在任一推力手柄上)将其取消。 在GPWS警告/风切变时: • 将推力手柄推至TOGA位, • 将侧杆向后拉到底(风切变时跟随SRS指引直至侧杆向后拉到底), • 起始保持机翼水平。 这样可以立即提供最大升力/最大推力/最小阻力。因此,CFIT脱离机动将更为有效。 坡度角保护
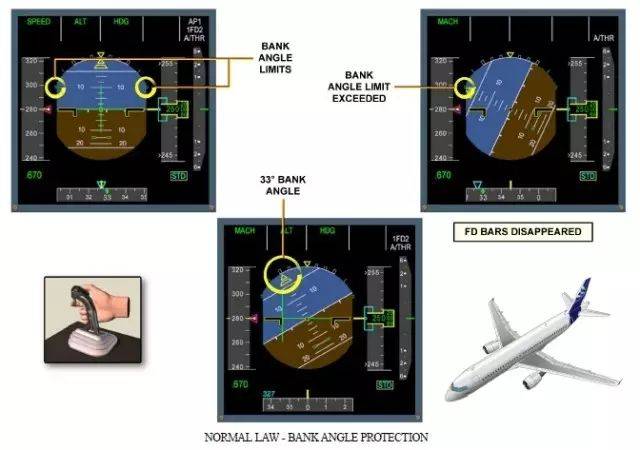
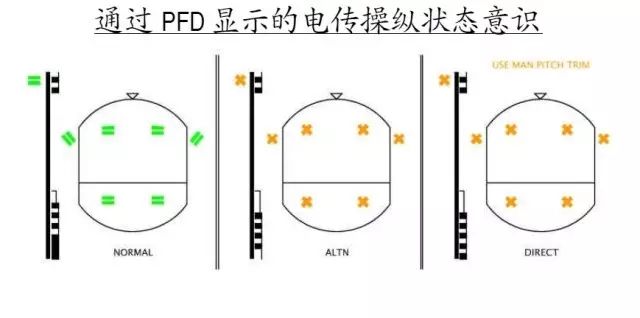
坡度角保护防止飞机进入任何重大的异常状态,也防止PF误操纵从而导致飞机进入大坡度角的状况(在异常状态下,飞机改出较为复杂,因为正确分析该状况并及时反应比较困难)。坡度角保护给PF提供全权限来有效地进行所需的横滚机动。 可达到的最大坡度角大致为: • 67 °, 在正常飞行包线内 (2.5 g 平飞) • 40 ° ,在高速保护时(以避免螺旋俯冲) • 45 °,在大迎角保护时。 备用法则 在有些双重故障时,计算机及其外围设备的完整性和裕度不足以获得正常法则及相关的保护。系统会根据剩余的外围设备或计算机的可用性逐步降级。 备用法则的特性(通常在双失效时触发): ‐ 在俯仰方式:与正常法则一样,拉平为直接法则 ‐ 在横滚方式:横滚直接 ‐ 大部分的保护失效,除了载荷系数保护。 在飞行包线限制边缘,飞机不受保护,即: ‐ 在高速时,飞机恢复自然静稳定性,并有超速警告, ‐ 在低速时(低于VLS的速度阈限),自动俯仰配平停止,飞机恢复自然径向静稳定性,1.03 VS1G 有失速警告。 在某些失效的情况中,例如失去 VS1G 计算或两部 ADR,径向静稳定性在低速不能恢复。若三部 ADR 都失去,则高速不能恢复。 在备用法则中,VMO 调置减小到 320 kt,并且迎角平台受抑制。对于 A318,MMO 调置也减小到 M 0.77。) 操作建议 在正常飞行包线范围内,俯仰操纵特性与正常法则相同。 在正常飞行包线范围外,PF必须采取合适的预防措施以避免失去操纵和/或超速。这些动作与无保护功能的飞机发生任何情况时所采取的动作是一样的。飞行机组应该考虑下降到一个更低的高度,以增加抖震的裕度。下降到 REC MAX ALT以下大约4000ft 能明显减低颠簸时失速警告的出现。 直接法则 大部分三重失效的情况都会触发直接法则。 发生这种情况时: • 方向舵偏转与操纵杆偏转成比例。最大偏转度依形态和CG而定 • 副翼和扰流板偏转与操纵杆偏转成比例,但随飞机形态改变而变化 • 俯仰配平为人工指令操纵特性是高性能飞机的自然特性,在各种形态和 CG 下都基本一致。 因此,飞机除了超速或失速警告外,显然没有保护、没有自动俯仰配平。 操作建议 PF 必须避免使用大推力变化或突然移动减速板,特别是重心靠后时。如果减速板放出且飞机已经重新配平,则 PF 必须柔和地收回减速板,给重新配平的时间,从而避免引起机头下俯的明显配平变化。 飞行机组应该考虑下降到一个较低的高度,增加抖震的裕度。下降大约REC MAX ALT以下4000ft 明显降低抖震中失速警告的出现。 法则信息指示 ECAM 和 PFD 会指示任何的操纵法则降级。 在 ECAM 上 备用法则: 飞行操纵 备用法则(保护失去) 最大速度320 kt(A318 为 320 kt/M 0.77) 直接法则: 飞行操纵 直接法则(保护失去) 最大速度320 kt/M 0.77 使用人工俯仰配平 在 PFD 上 PFD 可增强 PF 对飞行操纵状态的意识。 正常法则下,速度带上有关低速信息的特定符号(=以绿色显示)和特定格式指示哪一种保护可用。 当保护失去时,琥珀色十字 (X)代替绿色保护符号 (=)出现。当自动俯仰配平不再可用时,PFD 上出现琥珀色的 "USE MAN PITCH TRIM"信息,该信息显示在 FMA 上面。
机械备份法则 机械备份使得 PF 能够使用方向舵和人工俯仰配 平安全地稳定飞机,同时重构系统。 在这些情况中,其目的不是精确飞行,而是保持飞机姿态安全且稳定,从而可以恢复失效的系统。 使用俯仰配平轮控制俯仰。俯仰配平轮的任何动作都应该柔和的执行,因为比较大,THS 作用是十分明显的。方向舵提供横向控制,会引起明显的横滚且稍微延迟。PF 应使用一定的舵量转弯,并等待飞机反应。若要稳定并使机翼水平,则通过松开方向舵踏板预先考虑。 在 PFD 上立即出现红色的"MAN PITCH TRIM ONLY"信息,提醒 PF 正在使用机械备份。
非正常姿态法则 所谓“非正常姿态”的法则为: • 俯仰备用法则,有载荷系数保护(没有自动配平) • 横向直接法则,偏航备用法则 当达到以下极端值时这些法则发生作用: • 俯仰(50 °仰角,30 °俯角) • 坡度(125 °) • AOA (30 °, -10 °) • 速度(440 kt, 60 kt) • 马赫 (0.96, 0.1)。 总结 因为电传操纵提供保护以确保尽早快速进行反应,飞机达到这些姿态的可能性极小。这就使飞机进入异常状态的可能性及其影响减至最小。 电传操纵的效应及操纵法则的存在使有保护的空客飞机无需进行异常状态改出的训练。 转自:航佳技术 来源:3系飞行员 转载声明:本平台转载目的在于传递更多信息,并不代表平台赞同其观点和对其真实性负责。如涉及作品内容、版权和其它问题,请及时联系我们更正或删除。文章版权归原作者及原出处所有 ,本平台只提供参考并不构成任何投资及应用建议。返回搜狐,查看更多 |






【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |