Stm32f103c8t6(proteus仿真)学习 |
您所在的位置:网站首页 › 仿真娃娃叫什么名字 › Stm32f103c8t6(proteus仿真)学习 |
Stm32f103c8t6(proteus仿真)学习
|
目录
**一、proteus原理图绘制****二、代码的编写****1. PWM.c文件****2. PWM.h文件****3. servo.c文件****4. servo.h文件****5. key.c文件****6. key.h文件****7. OLED文件****8. main.c文件****9. 效果展示**
**三、项目(代码+仿真)分享链接**
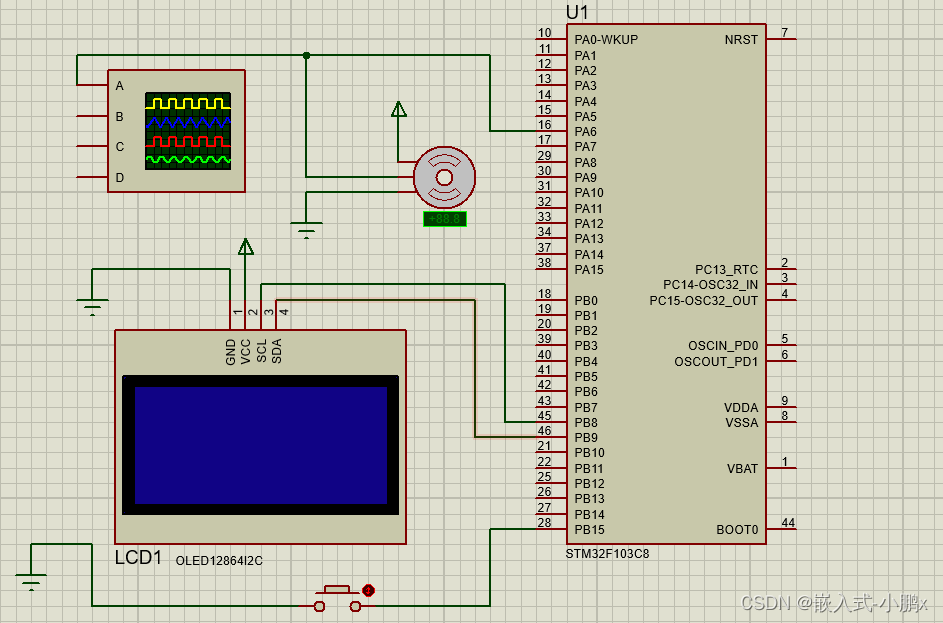
一、proteus原理图绘制
配置舵机的PWM #include "PWM.h" void PWM_Init(void) //PWM初始化 { //GPIO的结构体定义,定义一个GPIO类型的结构体,名字为GPIO_InitStructure GPIO_InitTypeDef GPIO_InitStructure; //TIM_TimeBase的结构体定义,定义一个TIM_TimeBase类型的结构体,名字为TIM_TimeBaseInitStructure TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //TIM_OC的结构体定义,定义一个TIM_OC类型的结构体,名字为TIM_OCInitStructure TIM_OCInitTypeDef TIM_OCInitStructure; //开启定时器3的时钟,注意是APB1(GPIO的是APB2) RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //开启GPIO的时钟,注意是APB2 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //GPIO引脚的重映射,TIM3_CH1重映射引脚到PB4 //RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM3, ENABLE); //GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //GPIO_Pin_4;TIM3_CH1重映射引脚到PB4 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //GPIO_Init(GPIOB, &GPIO_InitStructure); //PB4 //选择定时器的内部时钟源 TIM3 TIM_InternalClockConfig(TIM3); //配置定时器时基单元:TIM_TimeBase //选择时钟分频,可以选择1分频、2分频和4分频 TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //TIM_CKD_DIV1:1分频 //选择定时器计数方式,可选择向上计数、向下计数、中心对齐计数 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM_CounterMode_Up:向上计数 //设置ARR,即定时器周期:TIM_Period,取值0-65535 TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //ARR //设置PSC,即定时器预分频器的值:TIM_Prescaler,取值0-65535 TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC //高级定时器才用的到,重复计算器,先用不上赋值为0 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //TIM_TimeBase初始化 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //初始化配置定时器输出比较单元:TIM_OC //设置输出比较的模式:TIM_OCMode_PWM1,PWM1模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置输出比较的极性:TIM_OCPolarity_High;高极性:有效电平为高电平 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置输出使能 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //设置捕获比较寄存器 CCR 的值 TIM_OCInitStructure.TIM_Pulse = 0; //CCR //初始化定时器3通道1 TIM_OC1Init(TIM3, &TIM_OCInitStructure); //使能定时器3 TIM_Cmd(TIM3, ENABLE); } void PWM_SetCompare1(uint16_t Compare) { TIM_SetCompare1(TIM3, Compare); //设置捕获比较寄存器 CCR 的值 }注意:ARR设置为20000-1,PSC设置为72-1,正好对应舵机的周期20ms 公式:频率=72M / (PSC+1)(ARR+1) 代入ARR=20000-1、PSC=72-1,得频率=72x106/72x(2x104)=1/20 所以,周期=1/频率,得周期=20ms 具体ARR和PSC可以直接修改,只需要满足频率=1/20即可 2. PWM.h文件头文件 #ifndef __PWM_H #define __PWM_H #include "stm32f10x.h" // Device header void PWM_Init(void); void PWM_SetCompare1(uint16_t Compare); #endif 3. servo.c文件servo.c需要用到PWM,直接调用pwm.h即可 #include "servo.h" void Servo_Init(void) //舵机初始化 { PWM_Init(); //直接调用PWM初始化 } void Servo_SetAngle(float Angle) //输入需要设置的角度 { PWM_SetCompare1(Angle / 180 * 2000 + 500); //舵机角度转换 } 4. servo.h文件头文件 #ifndef __SERVO_H #define __SERVO_H #include "stm32f10x.h" // Device header #include "PWM.h" void Servo_Init(void); void Servo_SetAngle(float Angle); #endif 5. key.c文件使用按键控制舵机转动角度,按一次角度+30 #include "key.h" extern uint8_t KeyNum; //按键 初始化函数 void Key_Init(void){ //声明一个结构体,名字是GPIO_InitStructure GPIO_InitTypeDef GPIO_InitStructure; //使能GPIOA的时钟,ENABLE代表使能 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//GPIOB //按键需要设置引脚模式为上拉模式GPIO_Mode_IPU GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; //上拉模式GPIO_Mode_IPU //定义引脚为 15号引脚 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_15; //设置引脚的速度50MHz GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //初始化GPIO,初始化哪个引脚就对应哪个 GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化GPIOB,所以引脚对应PB15 //初始化时LED应为熄灭状态,所以要拉高LED引脚的电平 GPIO_SetBits(GPIOB,GPIO_Pin_15); //PB15引脚拉高电平 } uint8_t Key_GetNum(void){ //获取当前按键键值 //检测PB15引脚是否为低电平,按键按下时为低电平 if(GPIO_ReadInputDataBit(GPIOB , GPIO_Pin_15)==0){ //PB15为低电平,按键1已按下 delay_ms(20); //延时,消抖 //消抖,等待PB15重新变成高电平,如果一直为低电平则一直进入死循环 while(GPIO_ReadInputDataBit(GPIOB , GPIO_Pin_0)==0); delay_ms(20); //延时,消抖 KeyNum=1; //键值赋值为1,代表按键1已按下 } return KeyNum; //返回键值 } 6. key.h文件 #ifndef __KEY_H #define __KEY_H #include "stm32f10x.h" // Device header #include "delay.h" void Key_Init(void); uint8_t Key_GetNum(void); #endif 7. OLED文件里面有三个文件:OLED.Font.h、OLED.c和OLED.h 其中OLED.Font.h是字库文件 proteus无法准确仿真舵机,只能粗略模拟 百度网盘 链接:https://pan.baidu.com/s/1pcVtAcER2mAwnQnyRL3aXQ 提取码:p8q4 |
 proteus没有舵机的模块,只能类似的模拟 搜索:servo,选择PWMservo
proteus没有舵机的模块,只能类似的模拟 搜索:servo,选择PWMservo 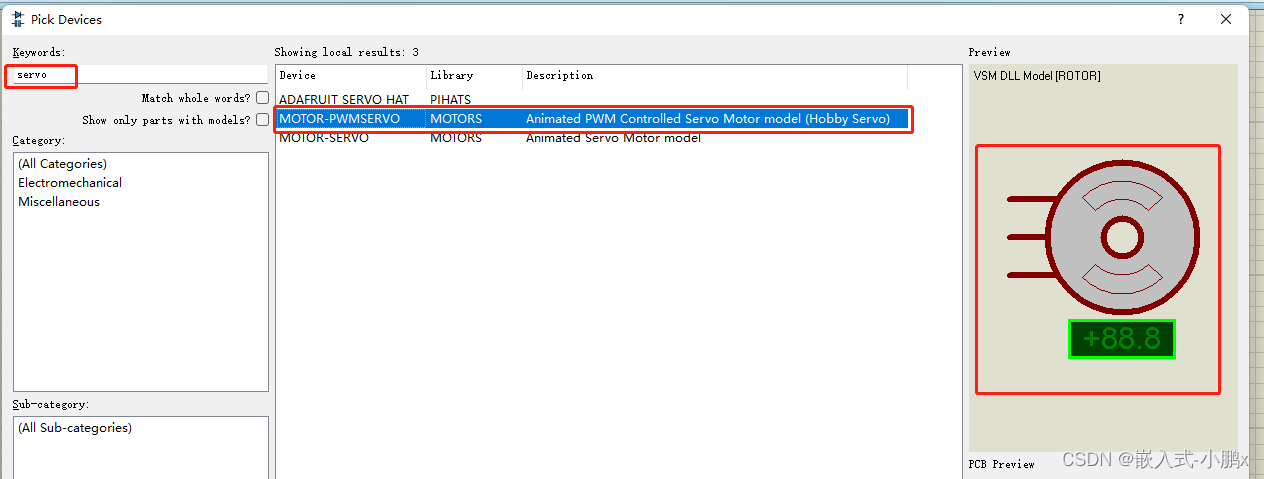 双击改参数
双击改参数 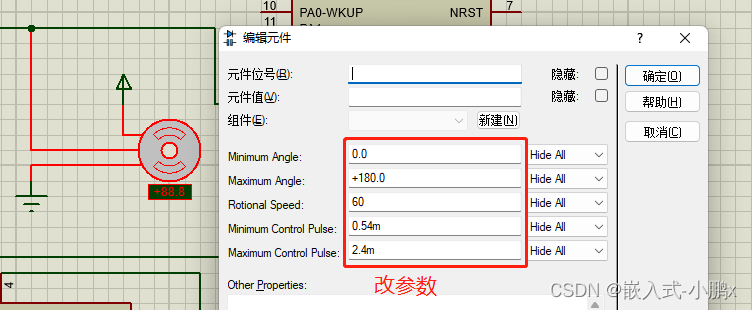 180度的舵机(SG90)的控制需要产生一个周期为20ms的脉冲信号,以0.5ms到2.5ms的高电平来控制舵机转动的角度,对应关系如下:
180度的舵机(SG90)的控制需要产生一个周期为20ms的脉冲信号,以0.5ms到2.5ms的高电平来控制舵机转动的角度,对应关系如下: 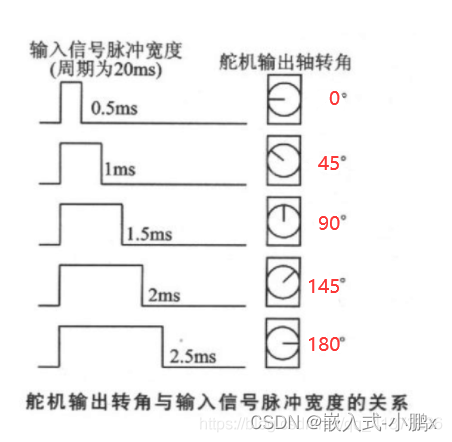
 百度网盘 链接:https://pan.baidu.com/s/1x2XtGtKYNEaTBEaUHLj5qw 提取码:69q1
百度网盘 链接:https://pan.baidu.com/s/1x2XtGtKYNEaTBEaUHLj5qw 提取码:69q1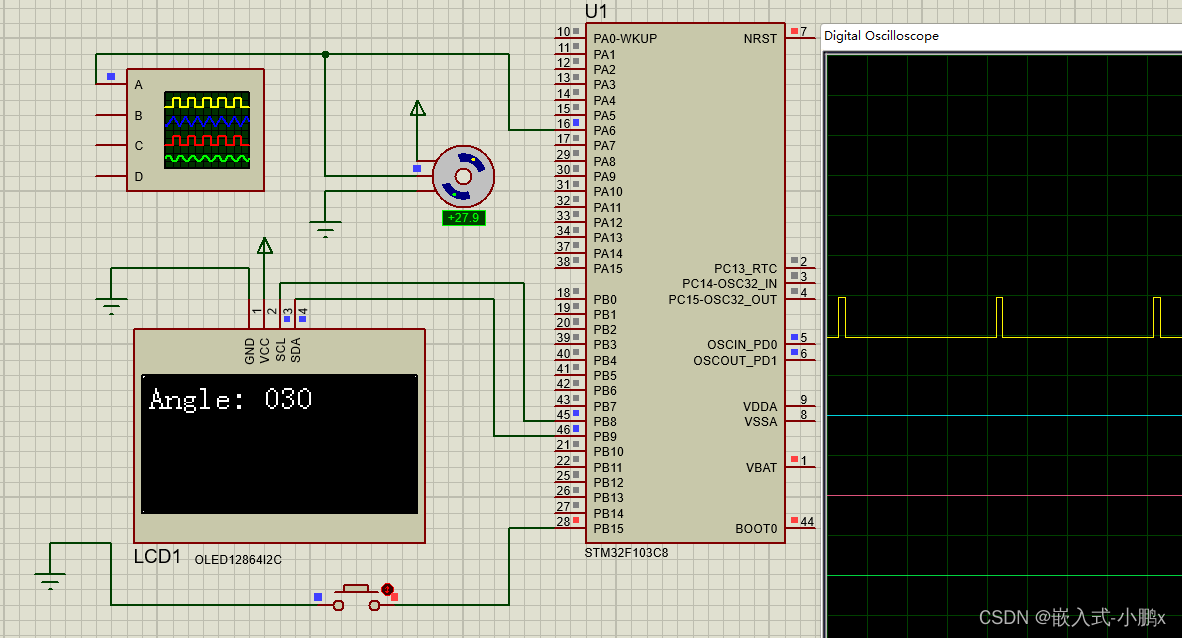
【本文地址】
公司简介
联系我们
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |