什么是平场校正(均场矫正)以及平场矫正原理 |
您所在的位置:网站首页 › 什么是回场 › 什么是平场校正(均场矫正)以及平场矫正原理 |
什么是平场校正(均场矫正)以及平场矫正原理
|
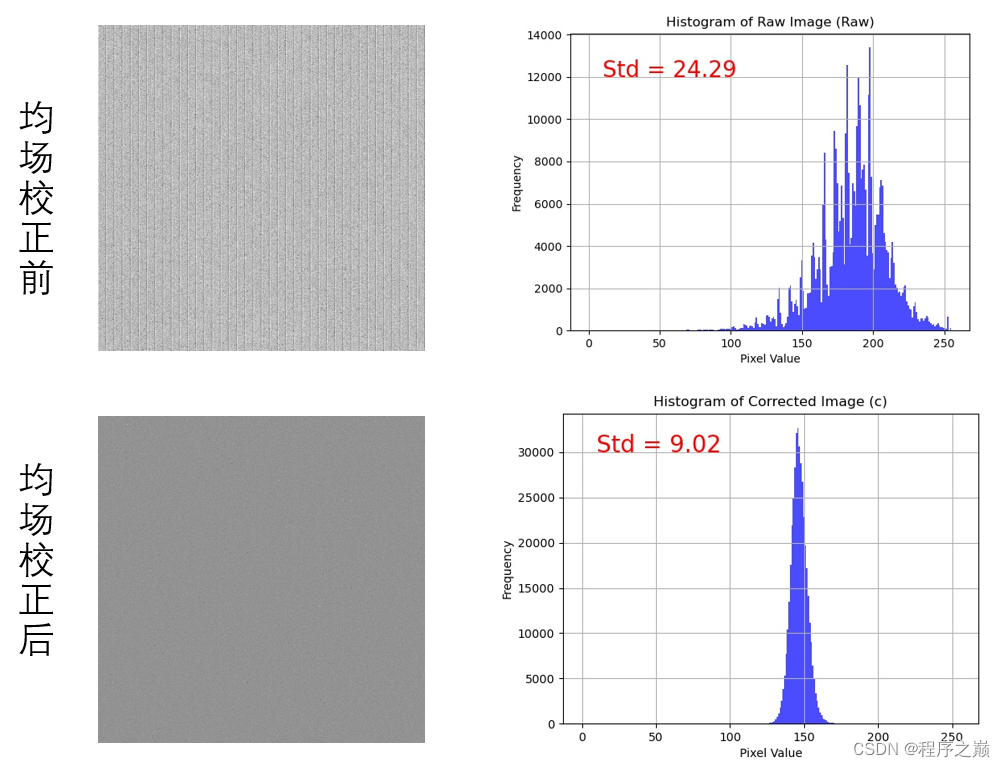
什么是平场校正 平场校正(Flat Field Correction),也称为光场校正、灰度校正或散斑校正,是一种用于图像传感器或相机校正的图像处理技术。它旨在消除图像中由于传感器不均匀响应、光照差异或其他因素引起的亮度和颜色不均匀性。平场校正可以提高图像的质量,使得不同区域的亮度更加均匀,减少了图像中的伪影、噪声和其他影响。 平场校正的主要思想是使用一个称为“平场图像”或“平场图”(Flat Field Image)的参考图像,该图像是由一个均匀光源照射到传感器上所得到的。平场图像捕捉了传感器的响应非均匀性,以及在不同区域的光照差异。 矫正原理过程第一步,获取四幅图像 D light D_{\text {light}} Dlight, D dark D_{\text {dark}} Ddark, D s-light D_{\text {s-light}} Ds-light, D s-dark D_{\text {s-dark}} Ds-dark D light D_{\text {light}} Dlight 为均匀光下,感光芯片拍摄的图片 D dark D_{\text {dark}} Ddark 为无光下,感光芯片拍摄的图片 D s-light D_{\text {s-light}} Ds-light 为正常情况下(有各种物体遮挡光源等非均匀光),感光芯片拍摄的图片 D s-dark D_{\text {s-dark}} Ds-dark 为正常情况下无光下,感光芯片拍摄的图片 对于感光器件,所采集到的图片符合如下公式: D = G ( x , y ) I ( x , y ) + Q D=G_{(x, y)} I_{(x, y)}+Q D=G(x,y)I(x,y)+Q 其中 D D D为感光后的图片数据, G ( x , y ) G_{(x, y)} G(x,y)为感光器件的增益,一般为线性的, I ( x , y ) I_{(x, y)} I(x,y)则为光强, Q Q Q则为噪声,主要包括读出随机噪声 Q 1 Q_1 Q1,读出电路引入的FPN噪声 Q 2 Q_2 Q2,初始阈值不一致引入的FPN噪声 Q 3 Q_3 Q3,光散粒噪声 Q 4 Q_4 Q4以及器件光响应不一致引入的FPN噪声 Q 5 Q_5 Q5。其中FPN噪声是影响成像质量的关键因素,因此我们引入均场矫正的方法来消弱图像的FPN噪声。 D light = G ( x , y ) I 0 + Q ( 1 ) D_{\text {light}} = G_{(x, y)} I_{0}+Q\space(1) Dlight=G(x,y)I0+Q (1) D dark = G ( x , y ) ∗ 0 + Q = Q ( 2 ) D_{\text {dark}} = G_{(x, y)}* 0+Q =Q\space(2) Ddark=G(x,y)∗0+Q=Q (2) D light − D dark = G ( x , y ) I 0 ( 3 ) D_{\text {light}} - D_{\text {dark}}= G_{(x, y)} I_{0}\space(3) Dlight−Ddark=G(x,y)I0 (3) 这里通过 D light − D dark D_{\text {light}} - D_{\text {dark}} Dlight−Ddark消除了噪声 Q Q Q,当然这里只是消除了前述的FPN噪声,包括读出电路引入的FPN噪声 Q 2 Q_2 Q2,初始阈值不一致引入的FPN噪声 Q 3 Q_3 Q3,器件光响应不一致引入的FPN噪声 Q 5 Q_5 Q5,并没有消除读出随机噪声 Q 1 Q_1 Q1和光散粒噪声 Q 4 Q_4 Q4。由于 Q 1 Q_1 Q1和 Q 4 Q_4 Q4影响较小,所以忽略不计了。 D light-sample = G ( x , y ) I ( x , y ) + Q ( 4 ) D_{\text {light-sample}} = G_{(x, y)} I_{(x,y)}+Q\space(4) Dlight-sample=G(x,y)I(x,y)+Q (4) D dark-sample = G ( x , y ) ∗ 0 + Q = Q ( 5 ) D_{\text {dark-sample}} = G_{(x, y)}* 0+Q =Q\space(5) Ddark-sample=G(x,y)∗0+Q=Q (5) D light-sample − D dark-sample = G ( x , y ) I ( x , y ) ( 6 ) D_{\text {light-sample}} - D_{\text {dark-sample}}= G_{(x, y)} I_{(x,y)}\space(6) Dlight-sample−Ddark-sample=G(x,y)I(x,y) (6) 第二步,用公式3和6直接相比,可以消除增益 G ( x , y ) G_{(x, y)} G(x,y) D c = D s − light − D s − d a r κ D light − D darr ∗ k = G ( x , y ) I ( x , y ) G ( x , y ) I 0 ∗ k ( 7 ) D_c=\frac{D_{s-\text { light }}-D_{s-d a r \kappa}}{D_{\text {light }}-D_{\text {darr }}} * k=\frac{G_{(x, y)} I_{(x, y)}}{G_{(x, y)} I_0}*k\space(7) Dc=Dlight −Ddarr Ds− light −Ds−darκ∗k=G(x,y)I0G(x,y)I(x,y)∗k (7) D c = k I 0 ∗ I ( x , y ) ( 8 ) D_c=\frac{k}{I_0} * I_{(x, y)}\space(8) Dc=I0k∗I(x,y) (8) 此时,所有像素的光响应增益均等效为 k I 0 \frac{k}{I_0} I0k ,为一个近似的常数,这样得到的 D c D_c Dc只和关照的场强有关,当然这是一个理想结果,但在实际应用中由于Q_1和Q_4以及非理想均匀光I_0等各种因素的存在,FPN噪声不可能完全消除只能一定程度改善。 以上是平场矫正的原理。 什么时候进行均场矫正我们的手机还有照相机为何从来没有平场矫正? 因为在电路级别已经做过了。 而一般的工业相机,可能需要定期做平场矫正。 代码实现 def Flat_Field_Correction(): dark = cv2.imread('C:\\Users\\Administrator\\Desktop\\test\\BMP20230816_172727.bmp', cv2.IMREAD_GRAYSCALE)[5000:5640,5000:5640] raw = cv2.imread('C:\\Users\\Administrator\\Desktop\\test\\BMP20230816_172634.bmp', cv2.IMREAD_GRAYSCALE)[5000:5640,5000:5640] flat_dark = cv2.imread('C:\\Users\\Administrator\\Desktop\\test\\D1.bmp', cv2.IMREAD_GRAYSCALE)[5000:5640,5000:5640] flat_light = cv2.imread('C:\\Users\\Administrator\\Desktop\\test\\l1.bmp', cv2.IMREAD_GRAYSCALE)[5000:5640,5000:5640] m = np.average(np.abs(raw-dark)) c = ((np.abs(raw-dark))/(np.abs(flat_light-flat_dark)))*m cv2.imwrite('c.bmp',c) cv2.imwrite('raw.bmp', raw) # hist, bins = np.histogram(raw.flatten(), bins=256, range=(0, 255)) std_deviation = np.std(raw.flatten()) # 绘制直方图 plt.figure() plt.hist(raw.flatten(), bins=256, range=(0, 255), color='blue', alpha=0.7) plt.xlabel('Pixel Value') plt.ylabel('Frequency') plt.title('Histogram of Raw Image (Raw)') plt.grid(True) figtext_x = 10 # 调整文本位置的x坐标(0.85表示右上角) figtext_y = 12000 # 调整文本位置的y坐标(0.9表示上方略下) # 在图中标注标准差的值 plt.text(figtext_x, figtext_y, 'Std = {:.2f}'.format(std_deviation), fontsize=20, color='red') # plt.show() plt.savefig('raw_result.jpg') # 计算直方图的标准差 # 计算直方图 # hist, bins = np.histogram(c.flatten(), bins=256, range=(0, 255)) std_deviation = c.flatten().astype('int8').std() # 绘制直方图 plt.figure() plt.hist(c.flatten(), bins=256, range=(0, 255), color='blue', alpha=0.7) plt.xlabel('Pixel Value') plt.ylabel('Frequency') plt.title('Histogram of Corrected Image (c)') plt.grid(True) figtext_x = 10 # 调整文本位置的x坐标(0.85表示右上角) figtext_y = 30000 # 调整文本位置的y坐标(0.9表示上方略下) # 在图中标注标准差的值 plt.text(figtext_x, figtext_y, 'Std = {:.2f}'.format(std_deviation), fontsize=20, color='red') # plt.show() plt.savefig('corrected_result.jpg')
参考资料: Wiki Flat-field correction Coaxlink What is Flat Field Correction? |
【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |