|
文章目录
一、背景二、标记1.标记骨骼特征1)剔除不必要点2)特征
三、实现1.获取关键点坐标2.计算特征1)距离2)角度
3.演示4.完整代码
一、背景
我的环境是:Windows10 + python3.7 + anaconda3 + jupyter5.6.0
安装 Openpose开源库时,有点费力,在前面一篇文章中讲述过,这里不再重复;前文有模型下载链接。
本次涉及的模型有:hand和pose-coco模型 
手部:22个关键点(21个骨骼点,第22个表示背景),骨骼:coco模型18个特征点    前文讲述了安装和基本使用方法,本文来将骨骼和手势融合在一张图片中同时检测并标记。 前文讲述了安装和基本使用方法,本文来将骨骼和手势融合在一张图片中同时检测并标记。
二、标记
1.标记骨骼特征
1)剔除不必要点
上一次是基于危险驾驶的探讨:  本次我需要手语图像识别,那么这里需要标记的上半身参考点的关键信息更多了。 本次我需要手语图像识别,那么这里需要标记的上半身参考点的关键信息更多了。
图中是我训练时的截图,可以发现手语所表达的肢体动作均在上半身,所以我们参考点可忽略(点9,10,12,13) 。  (图片参考于:中国手语数据集DEVISIGN 数据集以及手语公益网站视频) (图片参考于:中国手语数据集DEVISIGN 数据集以及手语公益网站视频)
2)特征
 图像识别,需要以上流程,目前我们在(特征提取和选择阶段),提取哪些特征是有价值的特征呢? 图像识别,需要以上流程,目前我们在(特征提取和选择阶段),提取哪些特征是有价值的特征呢?
示例:
危险驾驶判断标准:
抽烟:可以用双手到鼻的距离来进行判断,即点4,7到点0的距离。接电话:可以计算右手到右耳的距离(左手倒左耳的距离)来进行判断,即点4到点16的距离(点7到点17的距离)。  基于普通摄像头的太极姿势识别 太极姿势分为23式,原作者根据需求提取手臂姿势、腿部姿势: 原作者笔记:十五组人体姿态骨骼关键点之间的距离作为特征,同时选择 了十五组夹角作为角度特征整合到一个数组中去。 原作者笔记:十五组人体姿态骨骼关键点之间的距离作为特征,同时选择 了十五组夹角作为角度特征整合到一个数组中去。  为什么需要角度作为辅助判断参数呢? 为什么需要角度作为辅助判断参数呢? 仅选择距离判断因素,当人离摄像头更远一些,人就会缩小,距离会变短;人靠近摄像头,距离会变大,距离因素远远不够。 通过引入角度信息,我们都知道:一条直线不能确定其方向和大小,若是一个向量(有方向有大小的定点线段),那么这就可以在图像表示唯一。所以,这里是通过角度来约束距离。 引入角度有哪些弊端呢?
出自太极手势识别: 组合特征:距离和角度,能够提高复杂关系的拟合能力,同时由于有些角度在某些情况下的值为零值,比如 2-3-4(整个手臂:手,胳膊肘,肩膀之间的夹角的余弦值)夹角为直角的时候余弦值是零值,当 OpenPose 丢失一个点比如说 4 号位置手的信息没有检测出来的时候,返回零值,它的余弦值就和肩膀之间的夹角的余弦值)夹角为直角的时候余弦值相同了,因此仅仅依据距离信息有时候也会对数据训练产生一定的误导作用,所以就按照距离约束角度,角度约束距离的设计思路设计了独特的太极姿态识别的训练数据。
通过上述的分析,我们暂且提炼出25组关键特征,如图:  现在特征点也规划好了,上代码——在其中连线,圈圈画画,计算长度角度。 现在特征点也规划好了,上代码——在其中连线,圈圈画画,计算长度角度。
三、实现
1.获取关键点坐标
主要还是参考前一文:Openpose驾驶员危险驾驶检测(抽烟打电话)
前文是单独提取骨骼特征点和手势特征点,这里对其进行一个融合,思路是:
传入原图像,获取骨骼的coco模型18特征点  手势特征点:通过骨骼特征点point[4]和point[7]标注出两只手首的位置,以手首为中心,取小臂长范围对图片进行分割;再别对两个图片进行识别。  手势检测: 手势检测:  (当然这张图片里的dancer戴了手套,会影响手势部分的检测。) 此部分代码: 1. 在裁剪的时候注意左右相反的,我一开始弄错了,裁剪框老不对 rimg = img_cv2[y1:y2,x1:x2]# 裁剪坐标为[y0:y1, x0:x1] 2. 注意判断图像中没有显示左手和右手的情况,以及标注框范围过大时,只裁取到图像边缘: (当然这张图片里的dancer戴了手套,会影响手势部分的检测。) 此部分代码: 1. 在裁剪的时候注意左右相反的,我一开始弄错了,裁剪框老不对 rimg = img_cv2[y1:y2,x1:x2]# 裁剪坐标为[y0:y1, x0:x1] 2. 注意判断图像中没有显示左手和右手的情况,以及标注框范围过大时,只裁取到图像边缘: def getHandROI(self,imgfile,bonepoints):
"""hand手部感兴趣的区域寻找到双手图像
:param 图像路径,骨骼关键点
:return 左手关键点,右手关键点坐标集合
"""
img_cv2 = cv2.imread(imgfile)#原图像
img_height, img_width, _ = img_cv2.shape
rimg = img_cv2.copy()#图像备份
limg = img_cv2.copy()
# 以右手首为中心,裁剪长度为小臂长的图片
if bonepoints[4] and bonepoints[3]:#右手
h = int(self.__distance(bonepoints[4],bonepoints[3]))#小臂长
x_center = bonepoints[4][0]
y_center = bonepoints[4][1]
x1 = x_center-h
y1 = y_center-h
x2 = x_center+h
y2 = y_center+h
print(x1,x2,x_center,y_center,y1,y2)
if x1img_width:
x2 = img_width
if y1img_height:
y2 = img_height
rimg = img_cv2[y1:y2,x1:x2]# 裁剪坐标为[y0:y1, x0:x1]
if bonepoints[7] and bonepoints[6]:#左手
h = int(self.__distance(bonepoints[7],bonepoints[6]))#小臂长
x_center = bonepoints[7][0]
y_center = bonepoints[7][1]
x1 = x_center-h
y1 = y_center-h
x2 = x_center+h
y2 = y_center+h
print(x1,x2,x_center,y_center,y1,y2)
if x1img_width:
x2 = img_width
if y1img_height:
y2 = img_height
limg = img_cv2[y1:y2,x1:x2]# 裁剪坐标为[y0:y1, x0:x1]
plt.figure(figsize=[10, 10])
plt.subplot(1, 2, 1)
plt.imshow(cv2.cvtColor(rimg, cv2.COLOR_BGR2RGB))
plt.axis("off")
plt.subplot(1, 2, 2)
plt.imshow(cv2.cvtColor(limg, cv2.COLOR_BGR2RGB))
plt.axis("off")
plt.show()
# 分别获取手部特征点
rhandpoints = self.getHandKeypoints(rimg)
lhandpoints = self.getHandKeypoints(limg)
#显示
pose_model.vis_hand_pose(rimg, rhandpoints)
pose_model.vis_hand_pose(limg, lhandpoints)
return rhandpoints,lhandpoints
ok,现在你已经get了手势和骨骼的坐标了
2.计算特征
1)距离
我们图片是二维的, 
def __distance(self,A,B):
"""距离辅助函数
:param 两个坐标A(x1,y1)B(x2,y2)
:return 距离d=AB的距离
"""
if A is None or B is None:
return 0
else:
return math.sqrt((A[0]-B[0])**2+(A[1]-B[1])**2)
在openpose返回的关键点坐标中,未识别的关键点返回None;因此,我们这里也要做一个简单的None判断,坐标都没有了,还怎么计算距离呢?🤣
2)角度
我们之前保留的参考点为三个点:A-B-C式(2-3-4代表右手的手臂角度) 
这里采用余弦定理:(a,b,c分别是A,B,C的对边长度) 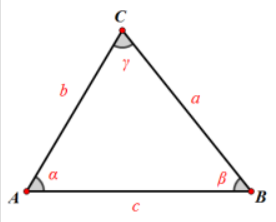 关于角B的计算公式: 关于角B的计算公式: 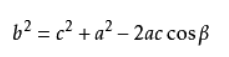 、 、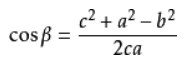 其中,我们计算先根据三个点的坐标信息,计算各边长;再计算余弦的弧度值: 其中,我们计算先根据三个点的坐标信息,计算各边长;再计算余弦的弧度值: 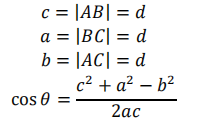 弧度值转角度值:math.degrees(),均可(这里为了我方便观察,我暂时转换了,实际运用时,不用转换,多一份计算,减慢一分运行速度!) 弧度值转角度值:math.degrees(),均可(这里为了我方便观察,我暂时转换了,实际运用时,不用转换,多一份计算,减慢一分运行速度!)
def __myAngle(self,A,B,C):
"""角度辅助函数
:param 三个坐标A(x1,y1)B(x2,y2)C(x3,y3)
:return 角B的余弦值(转换为角度)
"""
if A is None or B is None or C is None:
return 0
else:
a=self.__distance(B,C)
b=self.__distance(A,C)
c=self.__distance(A,B)
if 2*a*c !=0:
return math.degrees(a**2/+c**2-b**2)/(2*a*c)#计算出cos弧度,转换为角度
return 0
根据我之前的25个(距离+角度)信息,存放那个在list中,还是比较好理解。  为了演示,做了部分特征值参数显示,大致就是这个意思,这些数据都需要保存收集,为后面生成模型和识别做准备。 为了演示,做了部分特征值参数显示,大致就是这个意思,这些数据都需要保存收集,为后面生成模型和识别做准备。 
3.演示
4.完整代码
#!/usr/bin/python3
#!--*-- coding: utf-8 --*--
from __future__ import division# 精确除法
import cv2
import os
import time
import math
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif']=['SimHei'] #用来正常显示中文标签
plt.rcParams['axes.unicode_minus']=False #用来正常显示负号
class general_pose_model(object):
def __init__(self, modelpath):
# 指定采用的模型
# hand: 22 points(21个手势关键点,第22个点表示背景)
# COCO: 18 points()
self.inWidth = 368
self.inHeight = 368
self.threshold = 0.1
self.pose_net = self.general_coco_model(modelpath)
self.hand_num_points = 22
self.hand_point_pairs = [[0,1],[1,2],[2,3],[3,4],
[0,5],[5,6],[6,7],[7,8],
[0,9],[9,10],[10,11],[11,12],
[0,13],[13,14],[14,15],[15,16],
[0,17],[17,18],[18,19],[19,20]]
self.hand_net = self.get_hand_model(modelpath)
self.MIN_DESCRIPTOR = 32 # surprisingly enough, 2 descriptors are already enough
"""提取骨骼特征点,并可视化显示"""
def general_coco_model(self, modelpath):
self.points_name = {
"Nose": 0, "Neck": 1,
"RShoulder": 2, "RElbow": 3, "RWrist": 4,
"LShoulder": 5, "LElbow": 6, "LWrist": 7,
"RHip": 8, "RKnee": 9, "RAnkle": 10,
"LHip": 11, "LKnee": 12, "LAnkle": 13,
"REye": 14, "LEye": 15,
"REar": 16, "LEar": 17,
"Background": 18}
self.bone_num_points = 18
self.bone_point_pairs = [[1, 0], [1, 2], [1, 5],
[2, 3], [3, 4], [5, 6],
[6, 7], [1, 8], [8, 9],
[9, 10], [1, 11], [11, 12],
[12, 13], [0, 14], [0, 15],
[14, 16], [15, 17]]
prototxt = os.path.join(modelpath,"pose/coco/pose_deploy_linevec.prototxt")
caffemodel = os.path.join(modelpath, "pose/coco/pose_iter_440000.caffemodel")
coco_model = cv2.dnn.readNetFromCaffe(prototxt, caffemodel)
return coco_model
def getBoneKeypoints(self, imgfile):
"""COCO身体关键点检测
:param 图像路径
:return 关键点坐标集合
"""
img_cv2 = cv2.imread(imgfile)
img_height, img_width, _ = img_cv2.shape
inpBlob = cv2.dnn.blobFromImage(img_cv2,1.0 / 255,(self.inWidth, self.inHeight),(0, 0, 0), swapRB=False, crop=False)
self.pose_net.setInput(inpBlob)
self.pose_net.setPreferableBackend(cv2.dnn.DNN_BACKEND_OPENCV)
self.pose_net.setPreferableTarget(cv2.dnn.DNN_TARGET_OPENCL)
output = self.pose_net.forward()
H = output.shape[2]
W = output.shape[3]
print("形状:")
print(output.shape)
# vis heatmaps
self.vis_bone_heatmaps(img_file, output)
#
points = []
for idx in range(self.bone_num_points):
probMap = output[0, idx, :, :] # confidence map.
# 提取关键点区域的局部最大值
minVal, prob, minLoc, point = cv2.minMaxLoc(probMap)
# Scale the point to fit on the original image
x = (img_width * point[0]) / W
y = (img_height * point[1]) / H
if prob > self.threshold:
points.append((int(x), int(y)))
else:
points.append(None)
#print(points)
return points
def __distance(self,A,B):
"""距离辅助函数
:param 两个坐标A(x1,y1)B(x2,y2)
:return 距离d=AB的距离
"""
if A is None or B is None:
return 0
else:
return math.sqrt((A[0]-B[0])**2+(A[1]-B[1])**2)
def __myAngle(self,A,B,C):
"""角度辅助函数
:param 三个坐标A(x1,y1)B(x2,y2)C(x3,y3)
:return 角B的余弦值(转换为角度)
"""
if A is None or B is None or C is None:
return 0
else:
a=self.__distance(B,C)
b=self.__distance(A,C)
c=self.__distance(A,B)
if 2*a*c !=0:
return math.degrees(a**2/+c**2-b**2)/(2*a*c)#计算出cos弧度,转换为角度
return 0
def bonepointDistance(self, keyPoint):
"""距离辅助函数
:param keyPoint:
:return:list
:distance:
"""
distance0 = self.__distance(keyPoint[4],keyPoint[8])#右手右腰
distance1 = self.__distance(keyPoint[7],keyPoint[11])#左手左腰
distance2 = self.__distance(keyPoint[2],keyPoint[4])#手肩
distance3 = self.__distance(keyPoint[5],keyPoint[7])
distance4 = self.__distance(keyPoint[0],keyPoint[4])#头手
distance5 = self.__distance(keyPoint[0],keyPoint[7])
distance6 = self.__distance(keyPoint[4],keyPoint[7])#两手
distance7 = self.__distance(keyPoint[4],keyPoint[16])#手耳
distance8 = self.__distance(keyPoint[7],keyPoint[17])
distance9 = self.__distance(keyPoint[4],keyPoint[14])#手眼
distance10 = self.__distance(keyPoint[7],keyPoint[15])
distance11 = self.__distance(keyPoint[4],keyPoint[1])#手脖
distance12 = self.__distance(keyPoint[7],keyPoint[1])
distance13 = self.__distance(keyPoint[4],keyPoint[5])#左手左臂
distance14 = self.__distance(keyPoint[4],keyPoint[6])#右手左肩
distance15 = self.__distance(keyPoint[7],keyPoint[2])#右手左肩
distance16 = self.__distance(keyPoint[7],keyPoint[3])#左手右臂
return [distance0, distance1, distance2, distance3, distance4, distance5, distance6, distance7,distance8,
distance9, distance10, distance11, distance12, distance13, distance14, distance15, distance16]
def bonepointAngle(self, keyPoint):
"""角度辅助函数
:param keyPoint:
:return:list
:角度:
"""
angle0 = self.__myAngle(keyPoint[2], keyPoint[3], keyPoint[4])#右手臂夹角
angle1 = self.__myAngle(keyPoint[5], keyPoint[6], keyPoint[7])#左手臂夹角
angle2 = self.__myAngle(keyPoint[3], keyPoint[2], keyPoint[1])#右肩夹角
angle3 = self.__myAngle(keyPoint[6], keyPoint[5], keyPoint[1])
angle4 = self.__myAngle(keyPoint[4], keyPoint[0], keyPoint[7])#头手头
if keyPoint[8] is None or keyPoint[11] is None:
angle5 = 0
else:
temp = ((keyPoint[8][0]+keyPoint[11][0])/2,(keyPoint[8][1]+keyPoint[11][1])/2)#两腰的中间值
angle5 = self.__myAngle(keyPoint[4], temp, keyPoint[7])#手腰手
angle6 = self.__myAngle(keyPoint[4], keyPoint[1], keyPoint[8])#右手脖腰
angle7 = self.__myAngle(keyPoint[7], keyPoint[1], keyPoint[11])#右手脖腰
return [angle0, angle1, angle2, angle3, angle4, angle5, angle6, angle7]
def vis_bone_pose(self,imgfile,points):
"""显示标注骨骼点后的图像
:param 图像路径,COCO检测关键点坐标
"""
img_cv2 = cv2.imread(imgfile)
img_cv2_copy = np.copy(img_cv2)
for idx in range(len(points)):
if points[idx]:
cv2.circle(img_cv2_copy, points[idx], 5, (0, 255, 255), thickness=-1,lineType=cv2.FILLED)
cv2.putText(img_cv2_copy, "{}".format(idx), points[idx], cv2.FONT_HERSHEY_SIMPLEX,1,(0, 0, 255),4, lineType=cv2.LINE_AA)
h = int(self.__distance(points[4],points[3]))#小臂周长
if points[4]:
x_center = points[4][0]
y_center = points[4][1]
cv2.rectangle(img_cv2, (x_center-h, y_center-h), (x_center+h, y_center+h), (255, 0, 0), 2)#框
cv2.circle(img_cv2,(x_center, y_center), 3, (0, 0, 255), thickness=-1,lineType=cv2.FILLED)#坐标点
cv2.putText(img_cv2,"%d,%d" % (x_center,y_center),(x_center, y_center), cv2.FONT_HERSHEY_SIMPLEX,
0.6, (0, 0, 255), 2, lineType=cv2.LINE_AA)#右手首
if points[7]:
x_center = points[7][0]
y_center = points[7][1]
cv2.rectangle(img_cv2, (x_center-h, y_center-h), (x_center+h, y_center+h), (255, 0, 0), 2)
cv2.putText(img_cv2,"%d,%d" % (x_center,y_center),(x_center, y_center), cv2.FONT_HERSHEY_SIMPLEX,
0.6, (0, 0, 255), 2, lineType=cv2.LINE_AA)#左手首
cv2.circle(img_cv2,(x_center-h, y_center-h), 3, (225, 225, 255), thickness=-1,lineType=cv2.FILLED)#对角点
cv2.putText(img_cv2, "{}".format(x_center-h),(x_center-h, y_center-h), cv2.FONT_HERSHEY_SIMPLEX,
0.6, (255, 0, 0), 2, lineType=cv2.LINE_AA)
cv2.circle(img_cv2,(x_center+h, y_center+h), 3, (225, 225, 255), thickness=-1,lineType=cv2.FILLED)
cv2.putText(img_cv2, "{}".format(x_center+h),(x_center+h, y_center+h), cv2.FONT_HERSHEY_SIMPLEX,
0.6, (255, 0, 0), 2, lineType=cv2.LINE_AA)#对角点
# 骨骼连线
for pair in self.bone_point_pairs:
partA = pair[0]
partB = pair[1]
if points[partA] and points[partB]:
cv2.line(img_cv2, points[partA], points[partB], (0, 255, 255), 3)
cv2.circle(img_cv2, points[partA],4, (0, 0, 255),thickness=-1, lineType=cv2.FILLED)
plt.figure(figsize=[10, 10])
plt.subplot(1, 2, 1)
plt.imshow(cv2.cvtColor(img_cv2, cv2.COLOR_BGR2RGB))
plt.axis("off")
plt.subplot(1, 2, 2)
plt.imshow(cv2.cvtColor(img_cv2_copy, cv2.COLOR_BGR2RGB))
plt.axis("off")
plt.show()
def vis_bone_heatmaps(self, imgfile, net_outputs):
"""显示骨骼关键点热力图
:param 图像路径,神经网络
"""
img_cv2 = cv2.imread(imgfile)
plt.figure(figsize=[10, 10])
for pdx in range(self.bone_num_points):
probMap = net_outputs[0, pdx, :, :]#全部heatmap都初始化为0
probMap = cv2.resize(probMap,(img_cv2.shape[1], img_cv2.shape[0]))
plt.subplot(5, 5, pdx+1)
plt.imshow(cv2.cvtColor(img_cv2, cv2.COLOR_BGR2RGB))# background
plt.imshow(probMap, alpha=0.6)
plt.colorbar()
plt.axis("off")
plt.show()
"""提取手势图像(在骨骼基础上定位左右手图片),handpose特征点,并可视化显示"""
def get_hand_model(self, modelpath):
prototxt = os.path.join(modelpath, "hand/pose_deploy.prototxt")
caffemodel = os.path.join(modelpath, "hand/pose_iter_102000.caffemodel")
hand_model = cv2.dnn.readNetFromCaffe(prototxt, caffemodel)
return hand_model
def getOneHandKeypoints(self, handimg):
"""hand手部关键点检测(单手)
:param 手部图像路径,手部关键点
:return 单手关键点坐标集合
"""
img_height, img_width, _ = handimg.shape
aspect_ratio = img_width / img_height
inWidth = int(((aspect_ratio * self.inHeight) * 8) // 8)
inpBlob = cv2.dnn.blobFromImage(handimg, 1.0 / 255, (inWidth, self.inHeight), (0, 0, 0), swapRB=False, crop=False)
self.hand_net.setInput(inpBlob)
output = self.hand_net.forward()
# vis heatmaps
self.vis_hand_heatmaps(handimg, output)
#
points = []
for idx in range(self.hand_num_points):
probMap = output[0, idx, :, :] # confidence map.
probMap = cv2.resize(probMap, (img_width, img_height))
# Find global maxima of the probMap.
minVal, prob, minLoc, point = cv2.minMaxLoc(probMap)
if prob > self.threshold:
points.append((int(point[0]), int(point[1])))
else:
points.append(None)
return points
def getHandROI(self,imgfile,bonepoints):
"""hand手部感兴趣的区域寻找到双手图像
:param 图像路径,骨骼关键点
:return 左手关键点,右手关键点坐标集合
"""
img_cv2 = cv2.imread(imgfile)#原图像
img_height, img_width, _ = img_cv2.shape
rimg = img_cv2.copy()#图像备份
limg = img_cv2.copy()
# 以右手首为中心,裁剪长度为小臂长的图片
if bonepoints[4] and bonepoints[3]:#右手
h = int(self.__distance(bonepoints[4],bonepoints[3]))#小臂长
x_center = bonepoints[4][0]
y_center = bonepoints[4][1]
x1 = x_center-h
y1 = y_center-h
x2 = x_center+h
y2 = y_center+h
print(x1,x2,x_center,y_center,y1,y2)
if x1img_width:
x2 = img_width
if y1img_height:
y2 = img_height
rimg = img_cv2[y1:y2,x1:x2]# 裁剪坐标为[y0:y1, x0:x1]
if bonepoints[7] and bonepoints[6]:#左手
h = int(self.__distance(bonepoints[7],bonepoints[6]))#小臂长
x_center = bonepoints[7][0]
y_center = bonepoints[7][1]
x1 = x_center-h
y1 = y_center-h
x2 = x_center+h
y2 = y_center+h
print(x1,x2,x_center,y_center,y1,y2)
if x1img_width:
x2 = img_width
if y1img_height:
y2 = img_height
limg = img_cv2[y1:y2,x1:x2]# 裁剪坐标为[y0:y1, x0:x1]
plt.figure(figsize=[10, 10])
plt.subplot(1, 2, 1)
plt.imshow(cv2.cvtColor(rimg, cv2.COLOR_BGR2RGB))
plt.axis("off")
plt.subplot(1, 2, 2)
plt.imshow(cv2.cvtColor(limg, cv2.COLOR_BGR2RGB))
plt.axis("off")
plt.show()
return rimg,limg
def getHandsKeypoints(self,rimg,limg):
"""双手图像分别获取特征点
:param 图像路径,骨骼关键点
:return 左手关键点,右手关键点坐标集合
"""
# 分别获取手部特征点
rhandpoints = self.getOneHandKeypoints(rimg)
lhandpoints = self.getOneHandKeypoints(limg)
#显示
pose_model.vis_hand_pose(rimg, rhandpoints)
pose_model.vis_hand_pose(limg, lhandpoints)
return rhandpoints,lhandpoints
def vis_hand_heatmaps(self, handimg, net_outputs):
"""显示手势关键点热力图(单手)
:param 图像路径,神经网络
"""
plt.figure(figsize=[10, 10])
for pdx in range(self.hand_num_points):
probMap = net_outputs[0, pdx, :, :]
probMap = cv2.resize(probMap, (handimg.shape[1], handimg.shape[0]))
plt.subplot(5, 5, pdx+1)
plt.imshow(cv2.cvtColor(handimg, cv2.COLOR_BGR2RGB))
plt.imshow(probMap, alpha=0.6)
plt.colorbar()
plt.axis("off")
plt.show()
def vis_hand_pose(self, handimg, points):
"""显示标注手势关键点后的图像(单手)
:param 图像路径,每只手检测关键点坐标
"""
img_cv2_copy = np.copy(handimg)
for idx in range(len(points)):
if points[idx]:
cv2.circle(img_cv2_copy, points[idx], 2, (0, 255, 255), thickness=-1,lineType=cv2.FILLED)
cv2.putText(img_cv2_copy, "{}".format(idx), points[idx], cv2.FONT_HERSHEY_SIMPLEX,0.3,
(0, 0, 255), 1, lineType=cv2.LINE_AA)
# Draw Skeleton
for pair in self.hand_point_pairs:
partA = pair[0]
partB = pair[1]
if points[partA] and points[partB]:
cv2.line(handimg, points[partA], points[partB], (0, 255, 255), 2)
cv2.circle(handimg, points[partA], 2, (0, 0, 255), thickness=-1, lineType=cv2.FILLED)
plt.figure(figsize=[10, 10])
plt.subplot(1, 2, 1)
plt.imshow(cv2.cvtColor(handimg, cv2.COLOR_BGR2RGB))
plt.axis("off")
plt.subplot(1, 2, 2)
plt.imshow(cv2.cvtColor(img_cv2_copy, cv2.COLOR_BGR2RGB))
plt.axis("off")
plt.show()
if __name__ == '__main__':
print("[INFO]Pose estimation.")
img_file = "images/letter/melon.jpg"
#
start = time.time()
modelpath = "models/"
pose_model = general_pose_model(modelpath)
print("[INFO]Model loads time: ", time.time() - start)
start = time.time()
bone_points = pose_model.getBoneKeypoints(img_file)
print("[INFO]Model predicts time: ", time.time() - start)
pose_model.vis_bone_pose(img_file, bone_points)
print("骨骼关键距离信息: ")
DistanceList = pose_model.bonepointDistance(bone_points)
print(DistanceList)
print("骨骼关键角度信息: ")
AngleList = pose_model.bonepointAngle(bone_points)
print(AngleList)
# 手势
rimg,limg = pose_model.getHandROI(img_file,bone_points)# 左右手图像
rhandpoints,lhandpoints = pose_model.getHandsKeypoints(rimg,limg)#特征点
print("左右手关键点信息: ")
print(rhandpoints)
print(lhandpoints)
|