ROS中搭建分布式系统 主从机模式 |
您所在的位置:网站首页 › ros分布式 › ROS中搭建分布式系统 主从机模式 |
ROS中搭建分布式系统 主从机模式
|
系统介绍:
机器人端(主机): 设备:工控机sz 主机名:sz-Default-string 固定IP:192.168.5.101 远程PC(从机): 设备:笔记本Dell 主机名:ubuntu 固定IP:192.168.5.2 0.准备工作:将系统连接在一个局域网下,为了方便不再修改Hosts文件中的绑定域名,在局域网中将机器人端(主机)和远程PC(从机)设置成固定IP。 (在本项目中,机器人端是通过网线与路由器连接;远程PC端通过wifi接入机器人的路由器。 ) 1.在hosts文件中配置主从机IP目的:让两台机器分别认识下对方,以便后面可以进行双向通信。 若PC端为虚拟机,应将网络设置成“桥接模式”。 A:先找到主机、从机的IP与Hostname 在终端输入ifconfig,查看本机IP,如下 sz@sz-Default-string:~$ifconfig可看到下图: 再查看机器人端的Hostname: 输入命令:hostname sz@sz-Default-string:~$ hostname看到机器人主机名为:sz-Default-string 同理,可得到远程PC(从机)的IP和hostname分别为: IP:192.168.5.2 hostname:ubuntu B.配置机器人端(主机)IP和hostname 将机器人端的IP和hostname加入到 /etc/hosts中: sz@sz-Default-string:~$ sudo vim /etc/hosts
URI:URI(Uniform Resource Identifier,统一资源标识符)就是在IMS网络中IMS用户的“名字”,也就是IMS用户的身份标识。 A:机器人端(主机): 输入命令: sz@sz-Default-string:~$ sudo vim ~/.bashrc在bashrc文件夹中添加: export Hostname=sz-Default-string export ROS_MASTER_URI=http://sz-Default-string:11311B.远程笔记本端(从机) 输入命令: rosfun@ubuntu:~$ sudo vim ~/.bashrc在bashrc文件夹中添加: export Hostname=ubuntu export ROS_MASTER_URI=http://sz-Default-string:11311 3.测试是否配置成功机器人端运行: $ roscore $ rosrun turtlesim turtlesim_node远程笔记本端运行: $ rosrun turtlesim turtle_teleop_key用PC的键盘可以实现对主机中小乌龟的控制,则多机通信配置正确。 附本人在搭建此过程中遇到的报错和命令需求: https://blog.csdn.net/Twilightzr/article/details/115582438 |
 由于本系统中机器人端与自带路由器有线连接(要关毕wifi ,防止接入其他wifi网络,导致找不到IP),所以从enpls0中找到,机器人端IP为:192.168.5.101(这个IP是固定好了的)。 备注:要是是接入wifi网络的,应该从wn中找本机IP。
由于本系统中机器人端与自带路由器有线连接(要关毕wifi ,防止接入其他wifi网络,导致找不到IP),所以从enpls0中找到,机器人端IP为:192.168.5.101(这个IP是固定好了的)。 备注:要是是接入wifi网络的,应该从wn中找本机IP。 因此,可得知,机器人端的IP和hostname分别为: IP:192.168.5.101 hostname:sz-Default-string
因此,可得知,机器人端的IP和hostname分别为: IP:192.168.5.101 hostname:sz-Default-string C.配置从机端的IP和hostname
C.配置从机端的IP和hostname D.测试是否互通 在机器人端输入:
D.测试是否互通 在机器人端输入: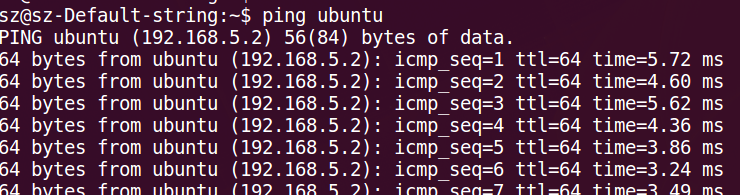 在笔记本电脑端输入:
在笔记本电脑端输入: 至此,这一步骤结束,配置成功。
至此,这一步骤结束,配置成功。【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |