|
目录
PLC控制KUKA机器人外部自动运行配置方法外部自动运行简介一、配置CELL.SRC二、外部自动运行接口的输入/输出端配置接口处重要信号概览输入端信号配置:输出端信号配置:
三、外部自动运行原理外部自动运行启动信号时序图
后记
PLC控制KUKA机器人外部自动运行配置方法
外部自动运行简介
通过外部自动运行接口可用上级控制器(例如用一个 PLC)来控制机器人进程。上级控制系统通过外部自动运行接口向机器人控制系统发出机器人进程的相关信号(如运行许可、故障确认、程序启动等)。 机器人控制系统向上级控制系统发送有关运行状态和故障状态的信息。为了能够使用外部自动运行接口,必须进行外部自动运行接口的输入/输出端配置。
一、配置CELL.SRC
将CELL.SRC程序文件中的“;EXAMPLE()”使用需要运行的程序进行替换,并去掉“;”。 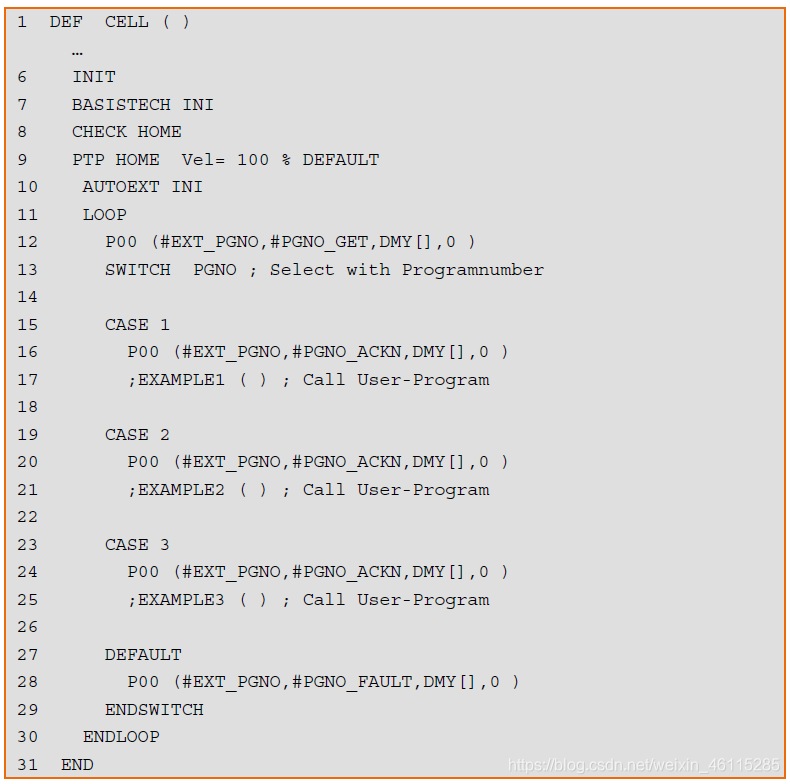
二、外部自动运行接口的输入/输出端配置
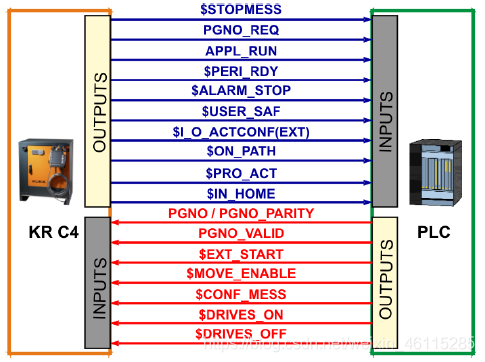
接口处重要信号概览
输入端信号配置:
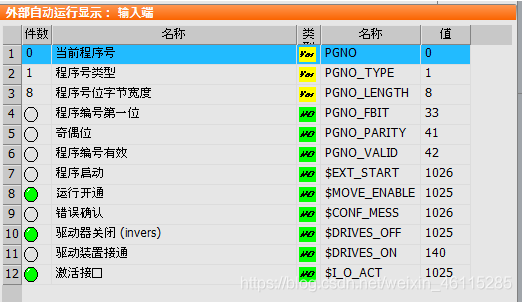
PGNO:当前程序号PGNO_TYPE:程序号类型PGNO_LENGTH:表示映射给变量PGNO的数据长度,以上例来说,这时 PGNO_LENGTH为7,变量PGNO最大值为127.PRNO_FBIT:表示位字节的第一位。例如,用
I
N
[
11
]
−
−
−
IN[11] ---
IN[11]−−−IN[17]来映射给变量 PGNO,这时PRNO_FBIT为11,意思是PRNO_FBIT是这个区域的第 一位。PGNO_PARITY:程序号奇偶位校验,没有特别要求,不需要校验的话 该值设置为0.PGNO_VAILD:程序号有效,机器人信号输入端的位信号,设置为脉冲信号。把位信号编号编写 在其后面,如,用$IN[18]来表示此程序号有效的话,当 $IN[18]为TRUE的时候,PLC发过来的程序号才有效。每次改变程序号时,PLC都要让PGNO_VAILD为TRUE.否则机器人端的变量PGNO 的值不会发生改变。$ EXT_START:外部启动,为脉冲信号(仅信号上升沿触发),设定该输入端后,输入/输出接口激活时将启动或继续一个程序。$ MOVE_ENABLE:运行,该输入端用于由上级控制器对机器人驱动器进行检查。
TRUE为可手动运行或执行程序FALSE为停住所有驱动装置并锁定所有激活的指令 $ CONF_MESS:确认信息提示,通过给该输入赋值,当故障原因排除后,上级控制器将自己确认故障信息。$ DRIVES_OFF:驱动装置关闭,下降沿生效,如果在此输入端上施加了持续至少 20 毫秒的低脉冲,则上级控制系统会关断机器人驱动装置。$ DRIVES_ON:驱动装置接通,如果在此输入端上施加了持续至少 20 毫秒的高脉冲,则上级控制系统会接通机器人驱动装置。
输出端信号配置:
$RC_RDY1:程序启动准备就绪;$ALARM_STOP:未急停时为“1”,该输出端在内外部急停被按下时复位到“0”;$USER_SAF:该输出端在打开护栏询问开关(运行方式 AUT)或放开确认开关(运行方式T1 或 T2 )时复位。$PERI_RDY:通过设定此输出端机器人控制系统通知上级控制系统中间回路已完全充电并且机器人驱动装置已准备就绪。$ROB_CAL:只要机器人轴的零点已删除,则该信号为 FALSE。I_O_ACTCONF:如果选择了外部自动运行这一运行方式并且输入端 $I_O_ACT 为 TRUE 时,则该输出端为 TRUE。$STOPMESS:该输出端由机器人控制系统来设定,以向上级控制器显示出现了一条要求停住机器人的信息提示。(例如:紧急停止按键、运行开通或操作人员防护装置)PGNO_FBIT_REFL:$$ALARM_STOP_INTERN:内部紧急关断,如果按下 smartPAD 上的紧急停止装置,则将该输出端设定为 FALSE。$PRO_ACT:当一个机器人层面上的过程激活时,始终给该输出端赋值。在处理一个程序或中断时,过程为激活状态。程序结束时的程序处理只有在所有脉冲输出端和触发器均处理完毕之后才视为未激活。PGNO_REQ:在该输出端信号变化时,要求上级控制器传送一个程序号。APPL_RUN:机器人控制系统通过设置此输出端来通知上级控制系统机器人正在处理有关程序。$PRO_MOVE:表示即使在手动运行时也要移动同步轴。该信号是 $ROB_STOPPED 的逆转。$IN_HOME:该输出端通知上级控制器机器人正位于其起始位置 (HOME)。$ON_PATH:只要机器人位于编程设定的轨迹上,此输出端即被赋值。在进行了 BCO 运行后输出端 ON_PATH 即被赋值。输出端保持激活,直到机器人离开了轨迹、程序复位或选择了语句。但信号 ON_PATH 无公差范围,机器人一离开轨迹,该信号便复位。$NEAR_POSRET:上级控制系统可以通过该信号确定机器人在球体内是否位于在 $POS_RET 中保存的位置周围。上级控制系统可用该信息决定是否允许重新启动该程序。用户可以在文件 $CUSTOM.DAT 中通过系统变量 $NEARPATHTOL定义球体的半径。$ROB_STOPPED:如果机器人停止,则设定该信号。即使对于 WAIT 指令,在等待期间也设定该输出端。该信号是 $PRO_MOVE 的逆转。$T1, $T2, $AUT, $EXT:如果相应的运行方式已选,则设定这些输出端。
三、外部自动运行原理
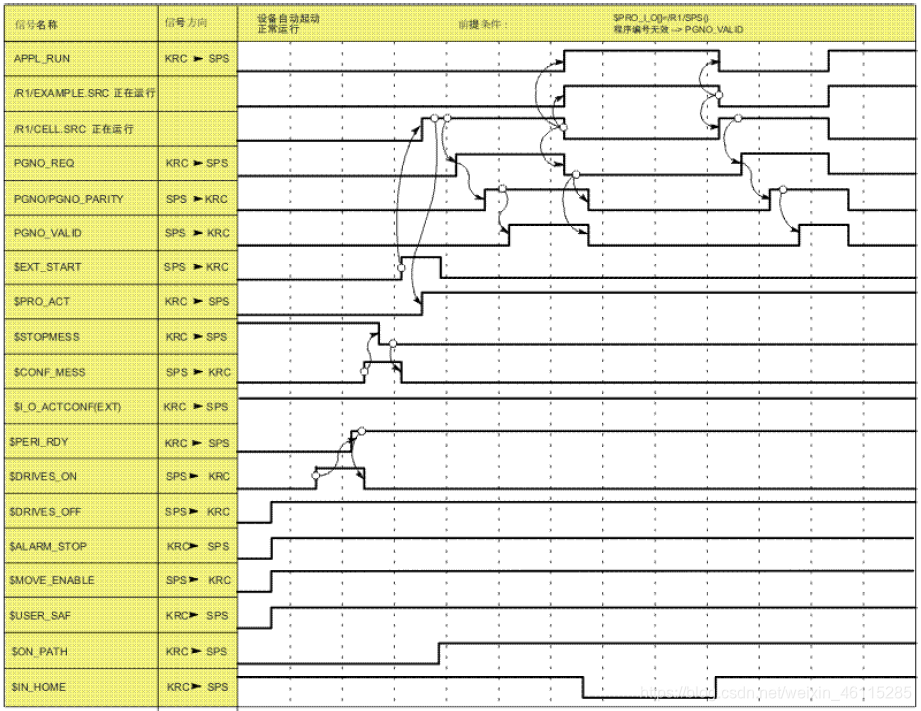
外部自动运行启动信号时序图
后记
本人第一篇博客,作为日常记录整理知识用途。 每天进步一点点。。。
|