| 无人机实践:DJI A3 飞控 | 您所在的位置:网站首页 › 飞控只亮红灯 › 无人机实践:DJI A3 飞控 |
无人机实践:DJI A3 飞控
|
无人机实践:DJI A3 飞控---使用汇总
DJI A3飞控介绍各模块介绍主控器GPS-Compass Pro 模块PMU 模块LED 模块
安装设备准备飞行器接收机电调电池
开始安装主控器安装GPS-Compass Pro 模块安装LED 模块安装PMU 模块安装接收机电 调电 池
指南针校准校准注意事项校准步骤需要重新校准的情况
飞行模式自动定位模式姿态模式功能模式手动模式飞行模式指示灯
飞行控制手动起飞姿态控制手动降落停止电机
LED 飞行状态指示灯GPS-Compass Pro/IMU Pro/ 主控器工作状态指示灯
DJI A3飞控介绍
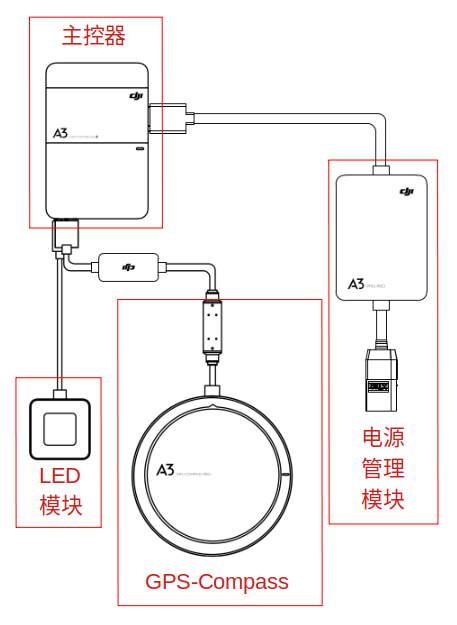
DJI 新一代飞行控制系统,可融合高度集成的多余度冗余硬件,创造业界领先的可靠性和抗风险能力。丰富的通讯、SDK 接口,可满足专业用途定制的需求。配合使用 DJI Lightbridge 2 高清图传,可支持 DJIGO App,获得先进的智能飞行功能。 A3 飞行控制系统包含 主控器(内置 IMU、数据记录仪和气压计)GPS-Compass Pro电源管理模块(PMU)LED 模块。A3 Pro 在 A3 的基础上,外接两套升级套件(内含 IMU Pro 和 GPS-Compass Pro),形成三余度冗余系统。
提供多个接口支持 DJI 设备及 SDK 开发应用,如 D-RTKGPS、Zenmuse Z15 系列云台 使用 DJI 调参助手向主控器配置参数,包括安装、飞控、其它外接设备的参数等,并且可以通过模拟器练习模拟飞行 如果配合 DJI Lightbridge 2 一起使用,用户还可以通过移动设备上 DJI GO App 实现智能飞行和远程调参 各模块介绍 主控器主控器有以下特点: 主控器内置两路独立工作的 CAN 总线接口、以及用于 Onboard SDK 的 API 串口。其中,CAN1 用 于 连 接 GPS-Compass Pro 模 块 和 DJI 设 备( 如 D-RTK GPS),CAN2 用 于 连 接SDK 设备。 内置 IMU 和气压计测定飞行姿态和高度,并与 GPS 一起实现飞行器水平方向定点,从而实现飞行控制。 支持多种接收机类型,并与 DJI Lightbridge 2 无缝兼容,配合 DJI GO App 可实现智能飞行控制。 M1-M8 连接到飞行器的电调,并且可以通过 iESC 端口与 DJI 智能电调通信。 四个可独立配置的输出通道和四个 I/O 通道,可连接 DJI 设备(DJI Zenmuse Z15 系列云台、 DJI 智能起落架)或 SDK 设备,用户可进行自定义。
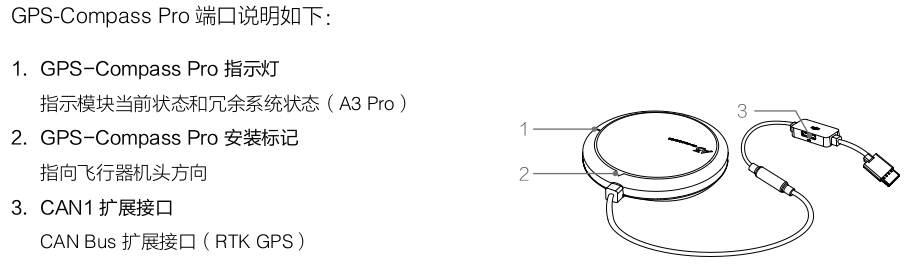
GPS-Compass Pro 模块内含 GPS/GLONASS 双模接收机和指南针,指南针用于测量地磁场,与 GPS 一起实现飞行器水平方向定点。使用前需要校准指南针,并且避免在铁磁物质环境中存放和使用。
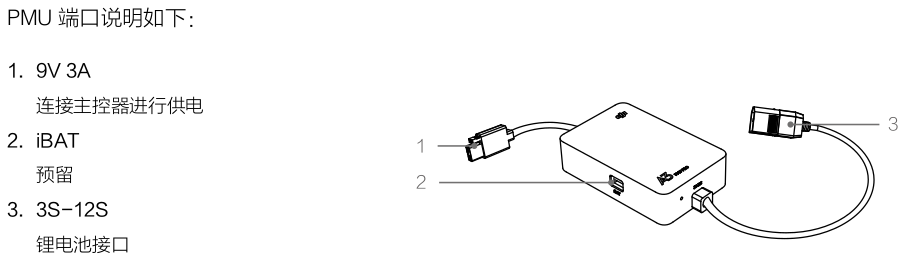
内置电源管理模块(PMU)为系统供电并提供保护功能。
LED 模块集成了 USB 接口和 LED 指示灯: A. Micro USB 接口用于与 PC 连接,使用调参助手进行参数设置和固件升级。 B. LED 指示灯用于飞行过程中指示飞行控制系统的状态(如:飞行模式)。
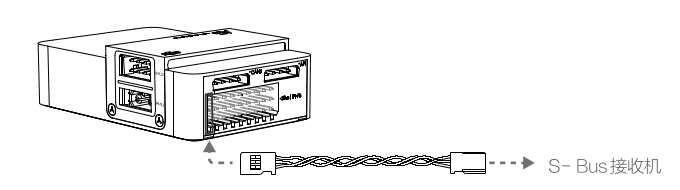
使用 A3 时,需自行准备: 飞行器遥控接收系统电调电池 飞行器设备支持多旋翼飞行器类型: I4、X4 型四旋翼;I6、V6、Y6、IY6 型六旋翼;X8、I8、V8、IX8 型八旋翼 接收机设备支持接收机类型: 支持以下多种类型接收机。无论使用哪一种接收机,确保与遥控器成功对频。根据相应接收机的说明书进行设置,并在调参助手中正确选择接收机类型。 DJI Lightbridge 2 使用 DJI Lightbridge 2 时,可配合 DJI App 实现参数设置和智能飞行。 DR16 不能使用 DJI App 实现兴趣点环绕(POI)和航点模式飞行。 S-Bus 不能使用 DJI App 实现兴趣点环绕(POI)和航点模式飞行。 无需设置遥控器端的失控保护功能。一旦遥控器与接收机出现信号中断的情况,主控器将自动进入失控保护状态,根据主控器所设置的方式进入悬停或者返航降落。 电调A3/A3 Pro 支持连接 400Hz 刷新频率的电子调速器(电调),请根据该要求选择动力系统 推荐使用 DJI 动力系统套装。如果使用 DJI 智能电调,可以通过主控器 iESC 端口与智能电调通信。 电池A3/A3 Pro 支持以下类型电池:非智能电池(3S-12S 锂聚合物电池)。 使用非智能电池:具有低电压保护功能,仅获得电压信息,只具备基础功能。 开始安装 主控器安装主控器朝上并与机身平行,推荐安装标记指向机头方向,并且内置 IMU 中心位置尽量靠近飞行器重心,然后用 3M 胶固定到机身上。 注意: 正面朝上,切勿倒置 尽量靠近震动小的位置安装,与机身保持平行。靠近飞行器重心位置震动较小 主控器不防水、不防油 确保 3M 胶安装牢固 GPS-Compass Pro 模块安装使用球头内六角螺丝刀,拧紧 M2.0×4 螺丝,完成 GPS 安装支架组装 使用 M2.5×7 螺丝和 M2.5×3.4 螺母安装 GPS 安装支架到飞行器上。尽量选用长支杆并远离其它电子设备 GPS-Compass Pro 朝上并且箭头指向机头方向,用 3M 胶固定到支架顶部。安装后尽量确保GPS-Compass Pro 模块底部与机身上板保持平行 注意: 保持 DJI 标记的一面朝上,且箭头指向飞行器正前方,否则无法正常飞行 指南针为磁性敏感设备,应远离所有其他电子设备和带磁性物质,否则会出现飞行异常甚至飞行器不受控制 LED 模块安装安装在飞行器的合适位置 , 确保在飞行过程中您能看到其闪灯。可以使用 LED 支架固定于机身。 PMU 模块安装安装在飞行器的合适位置 , 确保周围无遮挡,能较好进行散热。建议安装位置位于顶板下侧 接收机需要连接接收机、电调、电池等相关飞行器设备,并在 DJI Assistant 2中对应设置它们的参数,否则可能无法飞行甚至导致严重安全事故。 不同类型接收机连线接口不同,请对应连线 S-Bus 接收机 使用一根舵机线,连接 S-Bus 接收机到主控器 Sbus 端口。 使用舵机线,按顺序连接中心板底部 M1-M6 到主控器 ESC 的 M1-M6 端口 其它类型飞行器连接图。依照实际的电调数量,按顺序连到电调接口 电 池将 PMU 模块上 9V 的一端连接到主控器 PMU 端口,3S-12S 连接到电池上。 指南针校准首次使用,必须进行指南针校准,否则系统可能无法正常工作,从而影响飞行安全。指南针容易受其它电子设备干扰,将导致数据异常影响飞行,甚至导致飞行事故。经常校准可以使指南针工作在最佳状态。 校准注意事项 请勿在强磁场区域或大块金属附近校准,如磁矿、停车场、带有地下钢筋的建筑区域等。校准时请勿随身携带铁磁物质,如钥匙、手表等。如果在室内校准了指南针,则更换到室外飞行时切记重新校准,防止两个区域因磁场差异而 导致飞行数据异常。下可能有钢铁类的物质影响了指南针,请将飞行器移到其他的位置放置。 校准步骤 在遥控器模式切换开关的 P 档和 A 档之间来回所拨开关 3 次,飞行器状态指示灯黄灯常亮进入指南针校准状态。使用其它遥控器时,则是在开关档位 1 和档位 3 之间切换。水平旋转飞行器 360°,飞行器状态指示灯绿灯常亮。使飞行器机头朝下,水平旋转 360。飞行器状态指示灯模式灯正常亮着,完成校准。若飞行器状态指示灯显示红灯闪烁,表示校准失败,需要重新校准指南针。 需要重新校准的情况 指南针数据异常,飞行器状态指示灯显示红黄灯交替闪烁飞行场地与上一次指南针校准的场地相距较远飞行器机械结构有变化飞行时漂移比较严重,或者不能直线飞行 飞行模式A3飞控有多种控制模式,使用不同控制模式,飞行器的飞行表现会有所不同, 自动定位模式自动定位模式(P 模式)依据定位条件,在三种状态中自动切换: P-GPS 状态: 飞行器利用 GPS 信号和视觉定位,可在任意飞行高度自动定位并可自动返航。 P-OPTI 状态:GPS 定位无效,视觉定位有效时,飞行器仅可在 3 米及以下高度自动定位,同时自动返航功能失效。 P-ATTI 状态:GPS 和视觉定位都无效,飞行器仅可保持平衡,无法自动定位并会发生漂移,同时自动返航功能失效。 姿态模式姿态模式(A 模式):不使用 GPS 模块与视觉定位系统进行定位,仅提供姿态增稳,若 GPS卫星信号良好可实现返航。 功能模式功能模式(F 模式):辅助功能模式,在这个模式下可以使用智能飞行模式。 手动模式手动模式(M 模式):手动模式下,无 GPS 和视觉定位,也无姿态稳定,建议仅在紧急情况下使用。 飞行模式指示灯
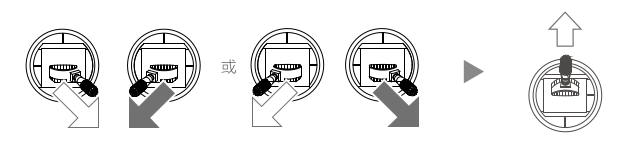
以下两种掰杆动作中的任何一种方式可用于启动电机。启动电机后横滚、俯仰和偏航杆立刻回中,同时向上推动油门杆使飞行器起飞。
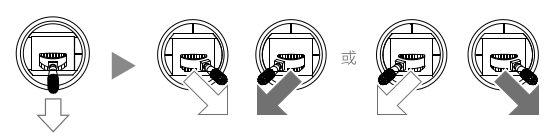
使用以下方式停止电机转动: 飞行器着地之后,将油门杆推到最低的位置并保持,3 秒后电机停止。 停止电机飞行器着地之后,先将油门杆推到最低位置①,然后执行掰杆动作②,电机将立即停止。停止 后松开摇杆。
|
 主控器是飞行控制系统的核心模块,综合利用 IMU、气压计、GPS 和指南针模块,可实现飞行器精准的姿态控制和高精度的定位功能
主控器是飞行控制系统的核心模块,综合利用 IMU、气压计、GPS 和指南针模块,可实现飞行器精准的姿态控制和高精度的定位功能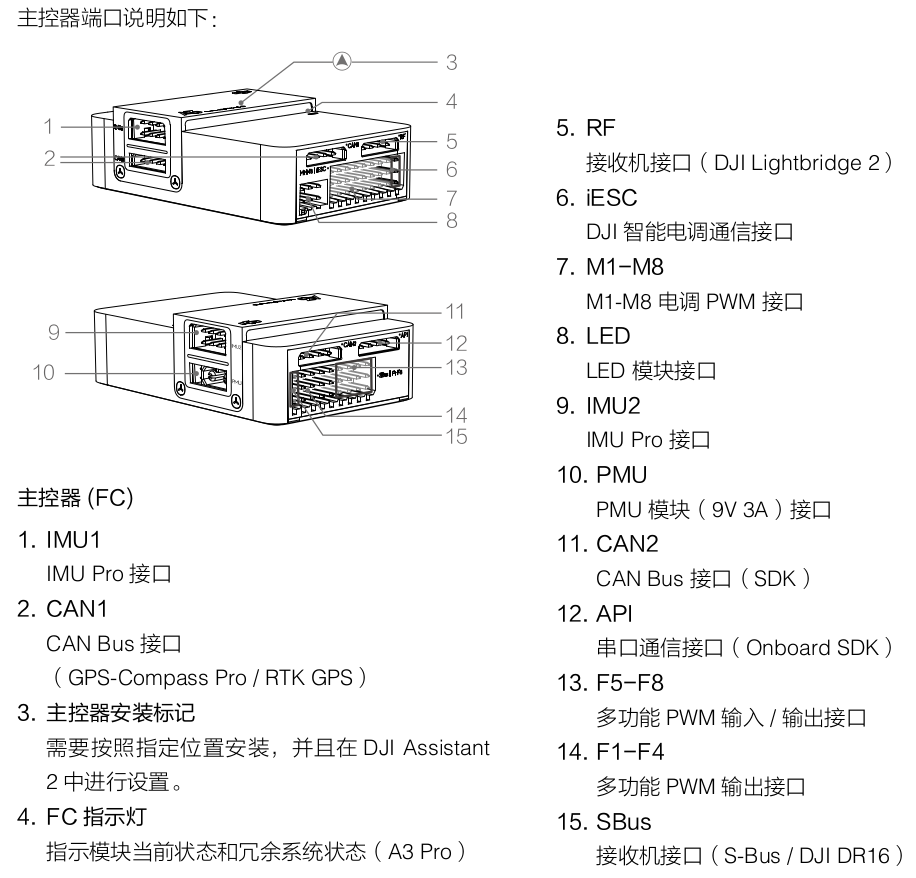




【本文地址】