| 【图像处理】基于双目立体匹配的景深计算(Matlab代码实现) | 您所在的位置:网站首页 › 阿里图片像素设置多少 › 【图像处理】基于双目立体匹配的景深计算(Matlab代码实现) |
【图像处理】基于双目立体匹配的景深计算(Matlab代码实现)
|
👨🎓个人主页:研学社的博客 💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭:行百里者,半于九十。 📋📋📋本文目录如下:🎁🎁🎁 目录 💥1 概述 📚2 运行结果 🎉3 参考文献 🌈4 Matlab代码实现
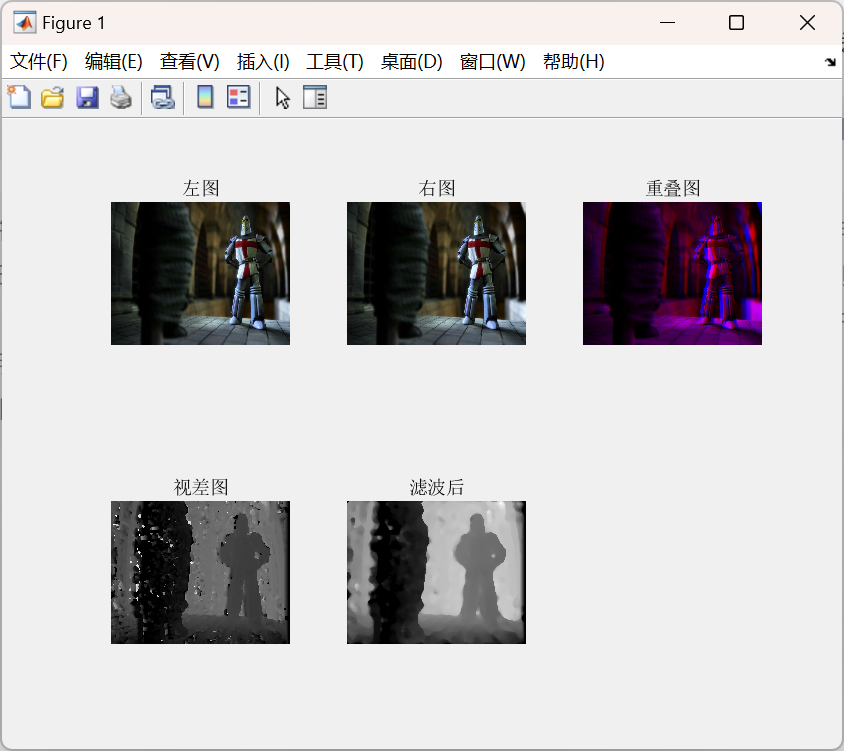
双目立体匹配一直是双眼视觉的研究热点。双目相机捕获同一场景的左右视点图像,使用立体匹配匹配算法获得视差图和深度图。 流程: 首先导入左右图像,并设置合理的搜索窗口和模板大小。以每个像素为中心,并使用固定大小的像素作为模板。假设相机已被校正,因此它仅水平搜索。在搜索窗口中连续移动左侧图像模板,以计算左侧和右侧模板的成本。获得成本后,通过累积像素信息来提高结果的信噪比,即成本聚合过程。这里我们优化窗口中最小生成值的坐标,并使用抛物线拟合来更新视差值。最后,对得到的视差图进行细化(使用中值滤波器),以消除视差图中产生的部分噪声。 📚2 运行结果
主函数部分代码: clc; clear; %% 加载2张立体图像 left = imread('iml1545.jpg'); right = imread('imr1545.jpg'); sizeI = size(left); % 显示复合图像 zero = zeros(sizeI(1), sizeI(2)); channelRed = left(:,:,1); channelBlue = right(:,:,3); composite = cat(3, channelRed, zero, channelBlue); figure(1); subplot(2,3,1); imshow(left); axis image; title('左图'); subplot(2,3,2); imshow(right); axis image; title('右图'); subplot(2,3,3); imshow(composite); axis image; title('重叠图'); %% 基本的块匹配 % 通过估计子像素的块匹配计算视差 disp('运行基本的块匹配~'); % 启动定时器 tic(); % 平均3个颜色通道值将RGB图像转换为灰度图像 leftI = mean(left, 3); rightI = mean(right, 3); % SHD % bitsUint8 = 8; % leftI = im2uint8(leftI./255.0); % rightI = im2uint8(rightI./255.0); % DbasicSubpixel将保存块匹配的结果,元素值为单精度32位浮点数 DbasicSubpixel = zeros(size(leftI), 'single'); % 获得图像大小 [imgHeight, imgWidth] = size(leftI); % 视差范围定义离第1幅图像中的块位置多少像素远来搜索其它图像中的匹配块。 disparityRange = 50; % 定义块匹配的块大小 halfBlockSize = 5; blockSize = 2 * halfBlockSize + 1; % 对于图像中的每行(m)像素 for (m = 1 : imgHeight) % 为模板和块设置最小/最大块边界 % 比如:第1行,minr = 1 且 maxr = 4 minr = max(1, m - halfBlockSize); maxr = min(imgHeight, m + halfBlockSize); % 对于图像中的每列(n)像素 for (n = 1 : imgWidth) % 为模板设置最小/最大边界 % 比如:第1列,minc = 1 且 maxc = 4 minc = max(1, n - halfBlockSize); maxc = min(imgWidth, n + halfBlockSize); % 将模板位置定义为搜索边界,限制搜索使其不会超出图像边界 % 'mind'为能够搜索至左边的最大像素数;'maxd'为能够搜索至右边的最大像素数 % 这里仅需要向右搜索,所以mind为0 % 对于要求双向搜索的图像,设置mind为max(-disparityRange, 1 - minc) mind = 0; maxd = min(disparityRange, imgWidth - maxc); % 选择右边的图像块用作模板 template = rightI(minr:maxr, minc:maxc); % 获得本次搜索的图像块数 numBlocks = maxd - mind + 1; % 创建向量来保存块偏差 blockDiffs = zeros(numBlocks, 1); % 计算模板和每块的偏差 for (i = mind : maxd) %选择左边图像距离为'i'处的块 block = leftI(minr:maxr, (minc + i):(maxc + i)); % 计算块的基于1的索引放进'blockDiffs'向量 blockIndex = i - mind + 1; %{ % NCC(Normalized Cross Correlation) ncc = 0; nccNumerator = 0; nccDenominator = 0; nccDenominatorRightWindow = 0; nccDenominatorLeftWindow = 0; %} % 计算模板和块间差的绝对值的和(SAD)作为结果 for (j = minr : maxr) for (k = minc : maxc) % SAD(Sum of Absolute Differences) blockDiff = abs(rightI(j, k) - leftI(j, k + i)); blockDiffs(blockIndex, 1) = blockDiffs(blockIndex, 1) + blockDiff; %{ % NCC nccNumerator = nccNumerator + (rightI(j, k) * leftI(j, k + i)); nccDenominatorLeftWindow = nccDenominatorLeftWindow + (leftI(j, k + i) * leftI(j, k + i)); nccDenominatorRightWindow = nccDenominatorRightWindow + (rightI(j, k) * rightI(j, k)); %} end end 🎉3 参考文献[1]杨晓立,叶乐佳,赵鑫,王飞,徐玉华,肖振中.双目立体视觉研究进展与应用[J/OL].激光与光电子学进展:1-30[2023-06-06]. 部分理论引用网络文献,若有侵权联系博主删除。 🌈4 Matlab代码实现 |

【本文地址】
公司简介
联系我们