| 现代控制理论4 | 您所在的位置:网站首页 › 逆矩阵求方程的解 › 现代控制理论4 |
现代控制理论4
|
注:本文是在MOOC平台上学习西北工业大学《现代控制理论基础》(郭建国、赵斌、郭宗易)的课程进行随笔记录与整理 一.线性定常连续系统状态方程的解——齐次方程 1.求解齐次状态方程:x`=Ax 其解描述的是: 即无控情况下在初始状态作用下系统的自由运动 解法: 将标量齐次微分方程的解法推广到向量中 标量中: 标量微分方程: x`=ax 解为: x(t)=e^at · x(0) (1)Ф(0)=1 有:x(t)=Ф(t)x(0), 得:x(0)=Ф(0)x(0)=x(0) 即:零时刻为初始状态 (2)Ф`(t)=AФ(t)=Ф(t)A 求A的时候可以用Ф(0)的导数来求,即: Ф`(0)=A (3)Ф(t1 +/- t2) =Ф(t1) Ф(+/- t2) =Ф(+/- t2) Ф(t1) (4) Ф(t)的逆矩阵 =Ф(-t) Ф(-t)的逆矩阵 =Ф(t) (证明:Ф(t-t)=Ф(t)Ф(-t)=Ф(0)=I) (5) x(t) = Ф(t-t0) x(t0) 首先有:x(t0) = Ф(t0) x(0) (6)时间分段: Ф(t2-t0) = Ф(t2-t1) Ф(t1-t0) (7)k个相乘变为可加 【Ф(t)】^k = Ф(kt) (8)当AB=BA时,有: e^(A-B)t = e^At ×e^Bt = e^Bt × e^At (9)状态转移矩阵引入非奇异线性变换后: 非齐次的解,是在初始状态和控制输入共同作用下系统的运动;或有控状态下系统的受迫运动 1.求解(1)积分法 思路:两边同乘e^-At 解为: (2)拉氏变换法 sx(s)= Ax(s) + x(0) + Bu(s) (sI-A) x(s) = x(0) + Bu(s) 整理后,取反拉式变化后,会得到两个函数先相乘后反拉式变化的情况,此时需要应用卷积定理 最后处理可得,与积分法有相同的结果 三.传函矩阵 1.由动态方程求传函矩阵在初始条件为0时,对动态方程 x`=Ax+Bu, y=Cx+Du 取拉氏变换: 可得到: 而对于单输入单输出系统,G(s)则是传递函数。此时若G(s)为对角方阵,则q=p 此时系统为解耦系统,整个系统由q§个独立系统组成 2.闭环系统中的传函矩阵
闭环: y = Ge = G(u-z) = Gu-GHy y=(I+GH)^(-1) · Gu 记Ф为闭环传递矩阵,Ф=(I+GH)^(-1) · G e = u-z = u-HGe e=(I+HG)^(-1)·u 记Фe为误差传递矩阵,Фe=(I+HG)^(-1) 它确定输入向量至偏差向量间的传递关系 四.线性离散系统的动态方程及其解离散:假设采样等间隔,间隔内变量保持常值 还可以通过对定常连续动态方程进行离散化 令t0=kT,有x(t0) = x(kT) = x(k); 令t=(k+1)T,有x[(k+1)T] = x(k+1) 定常离散动态方程的解: 令k=0,1,…k-1,可得到T,2T…kT |
 向量中: 法一:幂级数法(设齐次状态方程的解是t的向量幂级数)
向量中: 法一:幂级数法(设齐次状态方程的解是t的向量幂级数)  其中e^At,又称为矩阵指数函数/状态转移矩阵 (问号处并没有东西…) 法二:拉氏变化法
其中e^At,又称为矩阵指数函数/状态转移矩阵 (问号处并没有东西…) 法二:拉氏变化法  可以发现,两种方法的结果是相同互通的 注:无论A是否奇异,是否可逆,矩阵(sI-A)的逆都存在
可以发现,两种方法的结果是相同互通的 注:无论A是否奇异,是否可逆,矩阵(sI-A)的逆都存在
 解的第一项是对初始状态的相应分量,第二项是对控制输入的相应分量 (由于:输入为0,只有第一项;初值为0即x0为0,只有第二项)
解的第一项是对初始状态的相应分量,第二项是对控制输入的相应分量 (由于:输入为0,只有第一项;初值为0即x0为0,只有第二项) G(s)(q×p)为系统传函矩阵,表示初始条件为0时,输入向量与输出向量拉氏变换式之间的传递关系
G(s)(q×p)为系统传函矩阵,表示初始条件为0时,输入向量与输出向量拉氏变换式之间的传递关系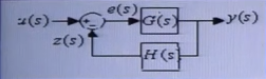 u:输入 e:偏差 z:反馈 y:输出 G:前向通路传递矩阵 H:反馈通路传递矩阵 开环: z = Hy = HGe (注意HG不能写反) HG为开环传递矩阵,确定偏差向量反馈向量间的传递关系
u:输入 e:偏差 z:反馈 y:输出 G:前向通路传递矩阵 H:反馈通路传递矩阵 开环: z = Hy = HGe (注意HG不能写反) HG为开环传递矩阵,确定偏差向量反馈向量间的传递关系 对多输入多输出系统有: x(k+1) = Gx(k) + Hu(k) y(k) = Cx(k) + Du(k)
对多输入多输出系统有: x(k+1) = Gx(k) + Hu(k) y(k) = Cx(k) + Du(k)
【本文地址】