| 四元数旋转相乘顺序(eigen和TF) | 您所在的位置:网站首页 › 连续相乘符号是什么 › 四元数旋转相乘顺序(eigen和TF) |
四元数旋转相乘顺序(eigen和TF)
|
四元数可以避免欧拉角的奇异性,但是不直观。旋转涉及到对全局坐标系还是对局部坐标系?对四元数旋转和对坐标旋转一样吗?左乘还是右乘? 坐标转换相对比较容易理解,四元数的旋转困扰了我很久,思考如下,如有错误请大佬指正。 规定ZYX顺序,对应Yaw,Pitch和Roll。 若以局部坐标系旋转,也就是先按照Z轴旋转,再绕当前坐标系Y轴旋转,再绕当前坐标系X轴旋转。四元数和常见的姿态表示均用这种方式。用公式表示 若以固定坐标系旋转,也就是先按照Z轴旋转,再绕固定坐标系Y轴旋转,再绕固定坐标系X轴旋转。用公式表示为:
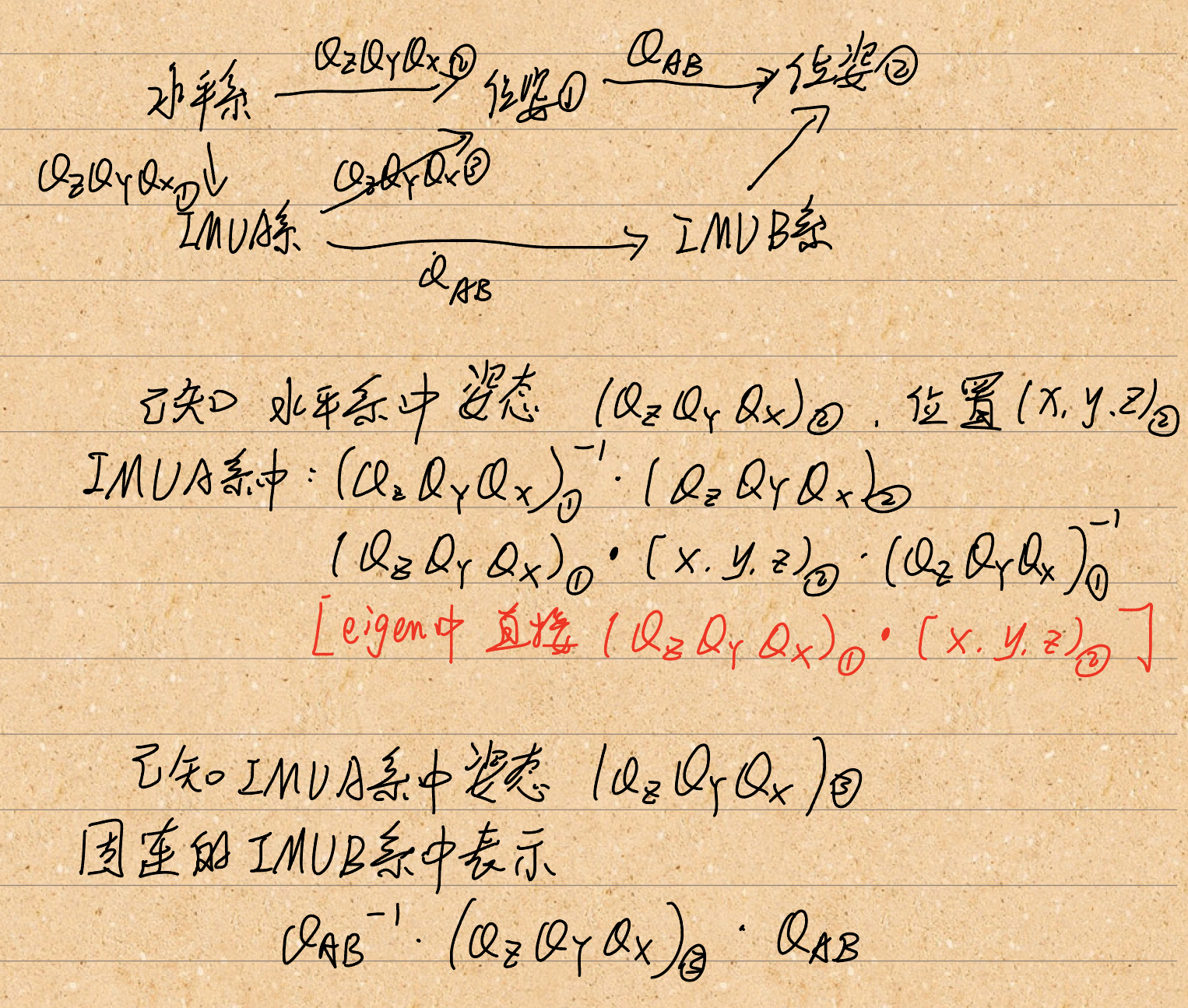
如果用四元数连续相乘,我觉得比较好理解的方式是全都考虑成局部坐标系中。 Eigen中使用欧拉角、四元数、旋转矩阵和角轴不在这里提及。可参考:(12条消息) 使用Eigen实现四元数、欧拉角、旋转矩阵、旋转向量之间的转换_eigen 四元数转欧拉角_一抹烟霞的博客-CSDN博客 方法一:用eigen Eigen::AngleAxisd rollAngle(Eigen::AngleAxisd(roll,Eigen::Vector3d::UnitX())); Eigen::AngleAxisd pitchAngle(Eigen::AngleAxisd(pitch,Eigen::Vector3d::UnitY())); Eigen::AngleAxisd yawAngle(Eigen::AngleAxisd(yaw,Eigen::Vector3d::UnitZ())); Eigen::Quaterniond Q = yawAngle*pitchAngle*rollAngle;方法二:用tf2 tf2::Quaternion tf_q; tf_q.setRPY( roll , pitch , yaw );这里有篇博客跟我的相反,我也不知道为什么。 (12条消息) Eigen 四元数和欧拉角相互转换_eigen 欧拉角转四元数_heroacool的博客-CSDN博客 四元数转欧拉角:方法一: Eigen::Vector3d euler=quaternion.matrix().eulerAngles(0,1,2);对应的就是Roll,Pitch和Yaw,也就是XYZ。但是由于有奇异性,所以容易超过pi。 方法二:用tf2中的四元数,不会出现超过pi Eigen::Quaterniond q; tf2::Quaternion tf_q(q.x(),q.y(),q.z(),q.w()); tf2::Matrix3x3 eulerMatrix(tf_q); eulerMatrix.getRPY(r,p,y); //发现一个新的方法 #include "tf2/impl/utils.h" double yaw = tf2::impl::getYaw(tf_q); //除了yaw以外还有 //void getEulerYPR(const tf2::Quaternion& q, double &yaw, double &pitch, double &roll) //double getYaw(const tf2::Quaternion& q)备注:tf2的四元数转回eigen中的四元数 tf2::Quaternion tf_q; Eigen::Quaterniond q(tf_q.getW(),tf_q.getX(),tf_q.getY(),tf_q.getZ());tf和eigen中四元数对坐标旋转的区别: eigen中四元数直接左乘vector3d Eigen::Vector3d A{x,y,z}; Eigen::Quaterniond q; A = q*A;tf中需要借助函数 tf2::Vector3 V{x,y,z}; tf2::Quaternion tf_q; tf2::Vector3 V1 = tf2::quatRotate(tf_q,V); //或者借助Transform tf2::Transform tftrans(tf_q); tf2::Vector3 V1 = tftrans*V;举个例子: 现在有三个坐标系,水平系、IMUA系和IMUB系,其中IMUA传感器和IMUB传感器固连,有一个固定的变换。 已知水平系下姿态和位置编号2,水平系下IMUA系的姿态编号1(原点重合),那么可得IMUA系中表示的位姿。 接着已知IMUA和IMUB之间的旋转(比如绕z轴转90度),那么可以将IMUA下的姿态,转换到IMUB下的姿态。注意这两个姿态不是同一个姿态,是同一个旋转变换。可以理解成一个无人机上有两个IMU。
|
【本文地址】