| 四旋翼无人机数学模型推导 | 您所在的位置:网站首页 › 运动学方程推导 › 四旋翼无人机数学模型推导 |
四旋翼无人机数学模型推导
|
本周开始进行四旋翼无人机的学习工作,首先来进行四旋翼无人机的数学模型推导工作。。 四旋翼动力学数学模型 坐标变换介绍四旋翼数学模型之前,首先引入坐标变换的概念,定义两个坐标系惯性坐标系{E},以及机体坐标系{B},惯性坐标系就相当于在地面建立的、静止不动的坐标系,也是我们操纵无人机所在的空间,而机体坐标系是建立于四旋翼机体之上,随着四旋翼姿态变换而变化,所以建立一种地面上的惯性坐标系与四旋翼机体坐标系之间的转换关系,就有这个必要。
对于惯性坐标系{E},以及机体坐标系{B},它们之间的转换关系或者说旋转矩阵是:
这个旋转矩阵在接下来的数学模型推导中会反复使用。 四旋翼移动方程四旋翼的姿态也分为移动和转动两个部分,首先推导移动部分运动学方程: 根据牛顿运动学定律有:
其中等式左边 等式右边自然是重力乘以加速度(位置的二阶导数) 定义机体坐标系下升力虚拟控制量U1,
因为是在机体坐标系下定义,所以升力自然只作用于机体的Z轴方向,那么怎么将机体坐标系下的升力转换到惯性坐标系下呢,这就用到了前面提到的旋转矩阵,左乘旋转矩阵,将机体坐标系的升力变换为惯性坐标系下的升力。其中Tx、Ty、Tz是惯性坐标系X、Y、Z轴上升力分量,在转动部分模型推导中会用到它们。
有了
注意,四旋翼平移运动方程中,位置变化作为输出量,但是却含有转动部分的参数,四旋翼无人机也是一种典型的欠驱动系统,即用四个输入(四个旋翼的角速度)去控制六个自由度(移动三个,转动三个)。 四旋翼转动方程定义机体(质量分布均匀对称)的转动惯量
一般Ix=Iy; 根据刚体转动定律:
其中:
得到:
在四旋翼姿态变化不大的情况下认为;
得到:
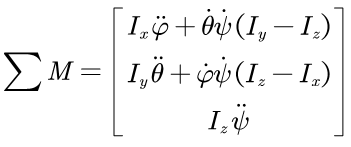
根据力学原理:
定义其中U2、U3、U4为横滚角、俯仰角、偏航角虚拟控制量:
和前文式子再进行联立得到:
于是得到转动方程:
这样和之前得到的四旋翼移动方程进行组合得到四旋翼整体的动力学模型:
|
















【本文地址】