| 超声波测距传感器初识之HC | 您所在的位置:网站首页 › 超声传感器的作用 › 超声波测距传感器初识之HC |
超声波测距传感器初识之HC
|
1.HC-SR04初识
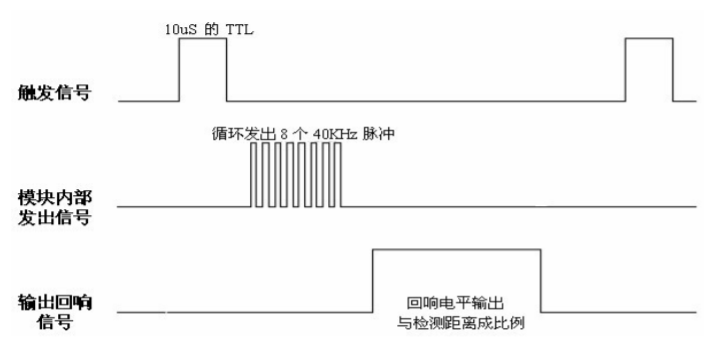
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器和控制电路。其基本工作原理采用IO口TRIG触发测距,给至少10us的高电平信号;模块自动发送8个40khz的方波,自动检测是否有信号返回;有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。 超声波传感器测距时,被测物体的面积不少于0.5平方米且平面尽量要求平整,否则影响测量的结果。建议测量周期为60ms以上,以防发射信号对回响信号的影响。超声波时序图如下图所示。
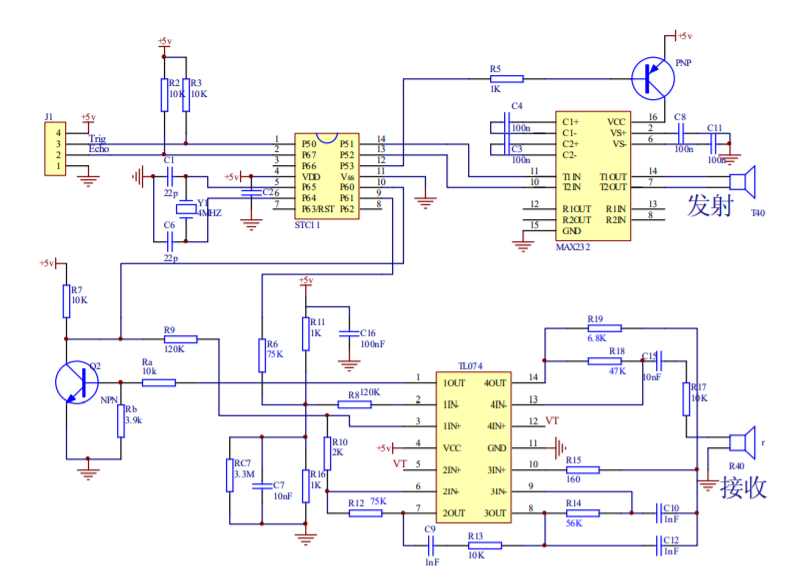
2.HC-SR04原理图 HC-SR04模块有四个引线接口,VCC、GND、Trig、Echo。VCC供5V电源,GND接地,Trig触发控制信号输入,Echo回响信号输出。HC-SR04原理图如下图所示。
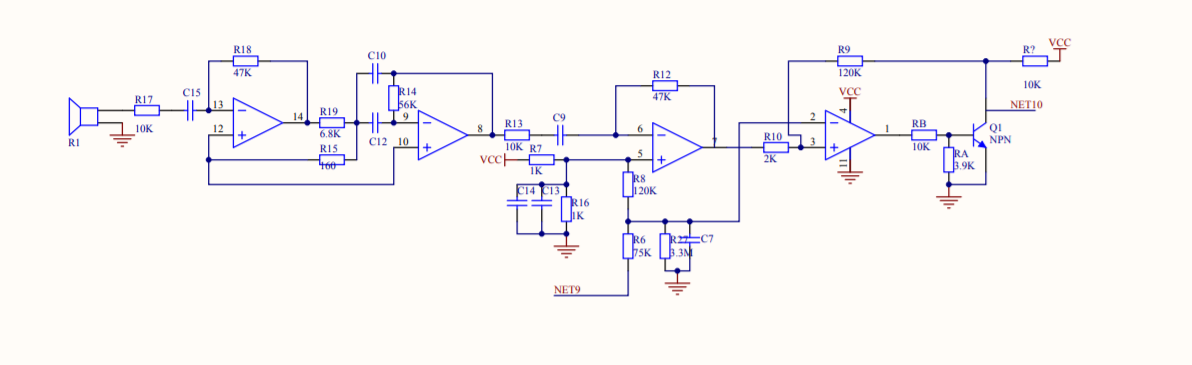
HC-SR04模块中STC11是一款STC单片机(STC单片机的一个系列,而不是一个具体的单片机型号),P65/P64接口外接4MHz的晶振电路,P63口接复位电路,STC11的作用是根据收到的发送信号TRIG,发送一端40kHZ波形给MAX232;还有个作用是根据接收到的超声波波形,返回一段ECHO信号。MAX232芯片起电平转换的作用,因为STC11单片机在P51/P52口输出的波形是TTL。为了使HC-SR04模块的测距变宽,MAX232对40KHZ的信号进行电平转换,功率放大。TL074为四路低噪声输入运算放大器。其作用为对接收到的超声波电压信号进行信号放大、滤波、电压比较等。接收电路可参考下图。
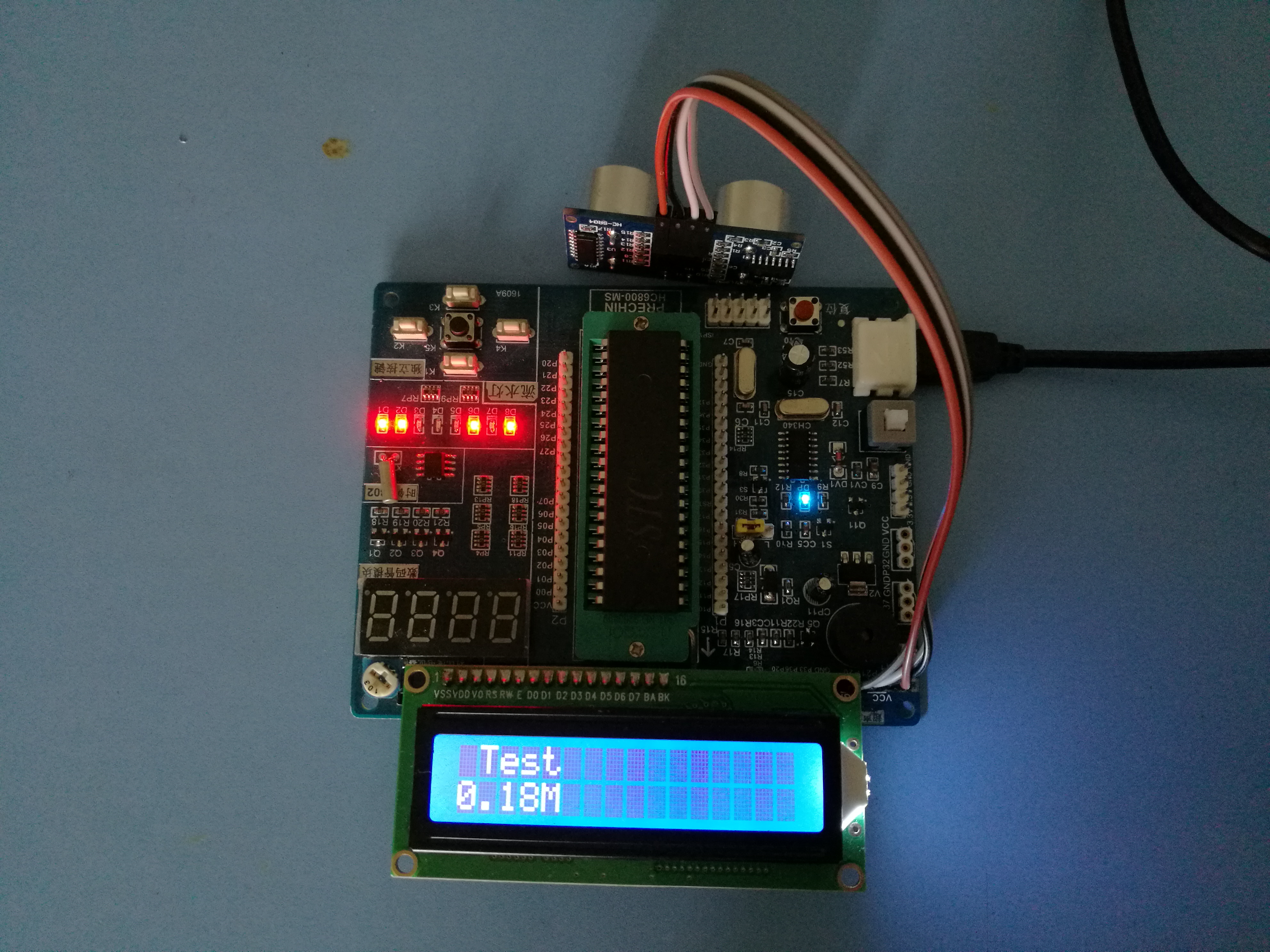
注:此图与HC-SR04模块图接收电路不同。 3.基于HC-SR04的测距仪设计该系统采用51系列单片机为控制核心,LCD1602为显示电路,HC-SR04为超声波传感器。实物图如下图所示。
LCD显示驱动代码
  #include"lcd.h"
void Read_Busy() //
{
unsigned char sta; //
LCD1602_DB = 0xff;
LCD1602_RS = 0;
LCD1602_RW = 1;
do
{
LCD1602_EN = 1;
sta = LCD1602_DB;
LCD1602_EN = 0; //
}while(sta & 0x80);
}
void Lcd1602_Write_Cmd(unsigned char cmd) //
{
Read_Busy();
LCD1602_RS = 0;
LCD1602_RW = 0;
LCD1602_DB = cmd;
LCD1602_EN = 1;
LCD1602_EN = 0;
}
void Lcd1602_Write_Data(unsigned char dat) //
{
Read_Busy();
LCD1602_RS = 1;
LCD1602_RW = 0;
LCD1602_DB = dat;
LCD1602_EN = 1;
LCD1602_EN = 0;
}
void LcdSetCursor(unsigned char x,unsigned char y) //
{
unsigned char addr;
if(y == 0)
addr = 0x00 + x;
else
addr = 0x40 + x;
Lcd1602_Write_Cmd(addr|0x80);
}
//
void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData)
{
Y &= 0x1;
X &= 0xF; //
if (Y) X |= 0x40; //
X |= 0x80; //
Lcd1602_Write_Cmd(X); //
Lcd1602_Write_Data(DData); //
}
void LcdShowStr(unsigned char x,unsigned char y,unsigned char *str)
{
LcdSetCursor(x,y); //
while(*str != '\0')
{
Lcd1602_Write_Data(*str++);
}
}
void InitLcd1602() //
{
Lcd1602_Write_Cmd(0x38); //
Lcd1602_Write_Cmd(0x0c);
Lcd1602_Write_Cmd(0x06);
Lcd1602_Write_Cmd(0x01); //
}
View Code
#include"lcd.h"
void Read_Busy() //
{
unsigned char sta; //
LCD1602_DB = 0xff;
LCD1602_RS = 0;
LCD1602_RW = 1;
do
{
LCD1602_EN = 1;
sta = LCD1602_DB;
LCD1602_EN = 0; //
}while(sta & 0x80);
}
void Lcd1602_Write_Cmd(unsigned char cmd) //
{
Read_Busy();
LCD1602_RS = 0;
LCD1602_RW = 0;
LCD1602_DB = cmd;
LCD1602_EN = 1;
LCD1602_EN = 0;
}
void Lcd1602_Write_Data(unsigned char dat) //
{
Read_Busy();
LCD1602_RS = 1;
LCD1602_RW = 0;
LCD1602_DB = dat;
LCD1602_EN = 1;
LCD1602_EN = 0;
}
void LcdSetCursor(unsigned char x,unsigned char y) //
{
unsigned char addr;
if(y == 0)
addr = 0x00 + x;
else
addr = 0x40 + x;
Lcd1602_Write_Cmd(addr|0x80);
}
//
void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData)
{
Y &= 0x1;
X &= 0xF; //
if (Y) X |= 0x40; //
X |= 0x80; //
Lcd1602_Write_Cmd(X); //
Lcd1602_Write_Data(DData); //
}
void LcdShowStr(unsigned char x,unsigned char y,unsigned char *str)
{
LcdSetCursor(x,y); //
while(*str != '\0')
{
Lcd1602_Write_Data(*str++);
}
}
void InitLcd1602() //
{
Lcd1602_Write_Cmd(0x38); //
Lcd1602_Write_Cmd(0x0c);
Lcd1602_Write_Cmd(0x06);
Lcd1602_Write_Cmd(0x01); //
}
View Code
超声波测距仪主程序
#include
#include
#include"lcd.h"
sbit Trig = P2^1;
sbit Echo = P2^0;
unsigned char PuZh[]=" Test ";
unsigned char code ASCII[15] = {'0','1','2','3','4','5','6','7','8','9','.','-','M'};
static unsigned char DisNum = 0; //ÏÔʾÓÃÖ¸Õë
unsigned int time=0;
unsigned long S=0;
bit flag =0;
unsigned char disbuff[4] ={ 0,0,0,0,};
void Conut(void)
{
time=TH0*256+TL0;
TH0=0;
TL0=0;
S=(time*1.7)/100; //Ëã³öÀ´ÊÇCM
if((S>=700)||flag==1) //³¬³ö²âÁ¿·¶Î§ÏÔʾ¡°-¡±
{
flag=0;
DisplayOneChar(0, 1, ASCII[11]);
DisplayOneChar(1, 1, ASCII[10]); //ÏÔʾµã
DisplayOneChar(2, 1, ASCII[11]);
DisplayOneChar(3, 1, ASCII[11]);
DisplayOneChar(4, 1, ASCII[12]); //ÏÔʾM
}
else
{
disbuff[0]=S%1000/100;
disbuff[1]=S%1000%100/10;
disbuff[2]=S%1000%10 %10;
DisplayOneChar(0, 1, ASCII[disbuff[0]]);
DisplayOneChar(1, 1, ASCII[10]); //ÏÔʾµã
DisplayOneChar(2, 1, ASCII[disbuff[1]]);
DisplayOneChar(3, 1, ASCII[disbuff[2]]);
DisplayOneChar(4, 1, ASCII[12]); //ÏÔʾM
}
}
void zd0() interrupt 1 //T0ÖжÏÓÃÀ´¼ÆÊýÆ÷Òç³ö,³¬¹ý²â¾à·¶Î§
{
flag=1; //ÖжÏÒç³ö±êÖ¾
}
void StartModule() //Æô¶¯Ä£¿é
{
Trig=1; //Æô¶¯Ò»´ÎÄ£¿é
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
Trig=0;
}
void delayms(unsigned int ms)
{
unsigned char i=100,j;
for(;ms;ms--)
{
while(--i)
{
j=10;
while(--j);
}
}
}
void main(void)
{
P1 = 0xF0;
TMOD=0x01; //ÉèT0Ϊ·½Ê½1£¬GATE=1£»
TH0=0;
TL0=0;
ET0=1; //ÔÊÐíT0ÖжÏ
EA=1; //¿ªÆô×ÜÖжÏ
InitLcd1602();
LcdShowStr(0,0,PuZh);
while(1)
{
StartModule();
while(!Echo); //µ±RXΪÁãʱµÈ´ý
TR0=1; //¿ªÆô¼ÆÊý
while(Echo); //µ±RXΪ1¼ÆÊý²¢µÈ´ý
TR0=0; //¹Ø±Õ¼ÆÊý
Conut(); //¼ÆËã
delayms(80);
}
}
View Code
|
【本文地址】