| UDS诊断看这篇就够了,吐血整理 | 您所在的位置:网站首页 › 诊断这两个字怎么写 › UDS诊断看这篇就够了,吐血整理 |
UDS诊断看这篇就够了,吐血整理
|
传送门 ==>> AutoSAR入门和实战系列总目录 1 简介与概述不同诊断通信协议的开发,调整,实施和维护会给车辆制造商,系统供应商和ECU供应商带来不必要的成本。为了解决此问题,将不同的技术协议和数据通信原理编译为一个国际ISO标准,通常称为统一诊断服务(ISO 14229-1)。 UDS ISO 14229-1:2013(UDS)和ISO 15765-3:2004(基于在CAN上的诊断)是互补标准,共同指定“ 基于CAN上的UDS”应用层协议。
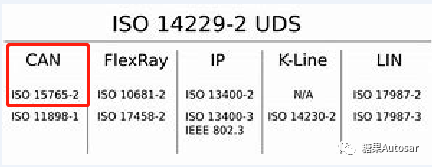
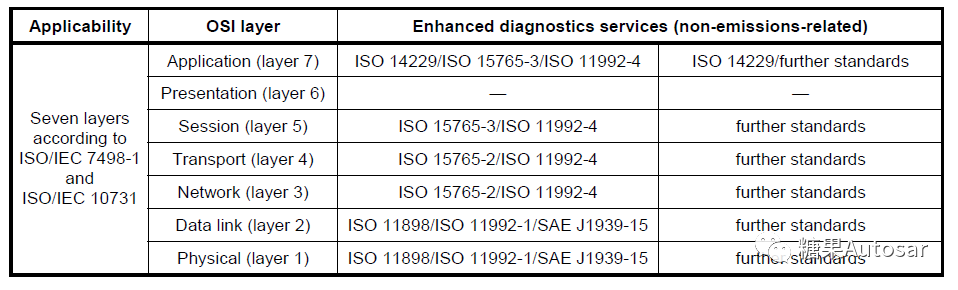
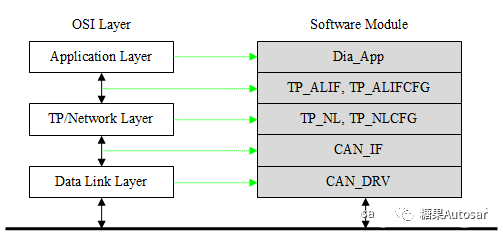
对于基于CAN总线的乘用车,将参考ISO 15765-2和ISO 11898。对于基于CAN总线的卡车(总质量大于3500 kg的道路车辆)将参考ISO 11992-4和ISO 11992-J。它们指定了道路车辆及其牵引车辆之间的诊断数据通信。下图总结了相关的ISO标准以及相应OSI层
应用协议层的下方是传输层/网络层,其PDU包含控制信息PCI,数据信息Data.即N_PDU =N_PCI+N_DATA。
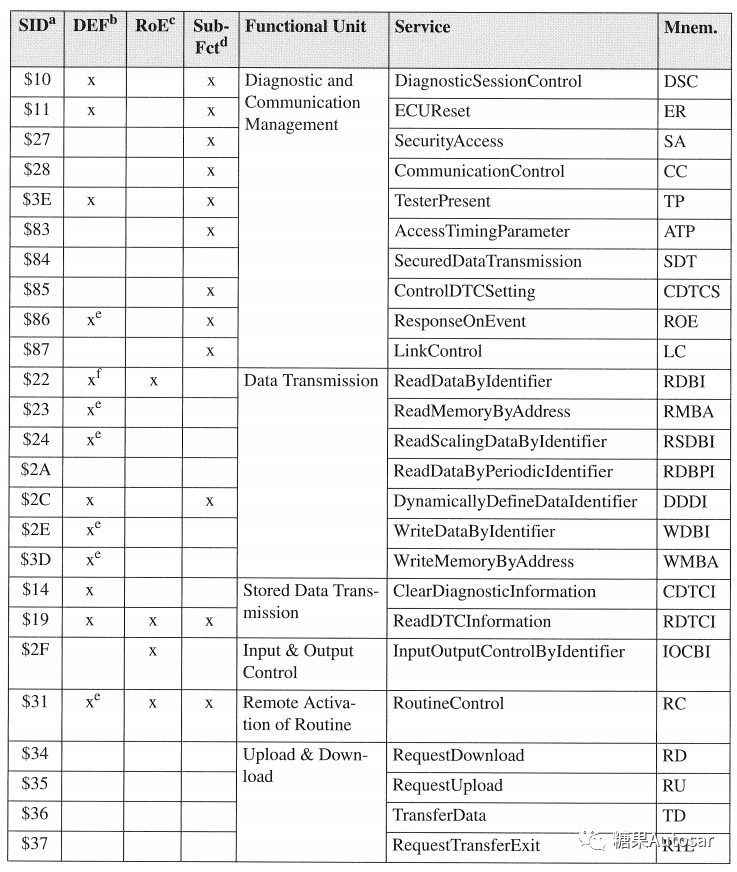
诊断服务根据功能处理目的被分类为各个不同的功能单元,下图总结了各种不同功能单元,UDS服务和及其服务ID。ISO 14229-1指定的25种统一诊断服务分为六个功能单元。
b. Def是默认会话层的缩写。ECU上电后会重置为默认会话层。 c. RoE是事件响应的简称。在此列中的“ x”表示该服务可作为事件响应机制的事件服务。 d. Sub-Fct是子功能的缩写。此服务支持子功能,因此支持肯定的响应抑制功能。 e. 这些服务如果在默认会话中可能需要安全访问服务才能请求。 f. 在默认会话中无法访问(某些数据标识符DID)。需要发出单独的$ 27(SecurityAccess)来解锁以访问这些数据。 2.1 根据服务的功能单元和请求服务标识符对服务进行分类 2.1.1 诊断和通信管理功能单元$10 DiagnosticSessionControl 该服务请求ECU从活动会话过渡到其他会话。 Data byte 数据字节Parameter name 参数名称Cvt 约定Hex value 十六进制数值1DiagnosticSessionControl Request Service IdM102sub-function = [diagnosticSessionType ]M01,02,03$11 ECU重置 该服务请求ECU执行复位。ECUReset请求参数的示例包括hardReset,keyOffOnReset和softReset。 Data byte 数据字节Parameter name 参数名称Cvt 约定Hex value 十六进制数值1ECUReset Request Service IdM112sub-function = [resetType ]M01,02,03$27 SecurityAccess 此服务用于在活动诊断会话中达到更高的安全级别。可能需要SecurityAccess请求来解锁并访问受保护的功能及数据(例如通过DID读取ECU ID信息)。也可以用于从一个会话通过解锁以成功切换到其他会话。 Data byte数据字节Parameter name参数名称Cvt约定Hex value十六进制数值1SecurityAccess Request Service IdM272sub-function = [securityAccessType = requestSeed ]M01,05,09 Data byte数据字节Parameter name参数名称Cvt约定Hex value十六进制数值1SecurityAccess Request Service IdM272sub-function = [securityAccessType = requestSeed ]M02,06,0AsecurityKey = [3key#1 (byte 1)M00-FF4key#2 (byte 2)M00-FF5key#3 (byte 3)M00-FF6key#4 (byte 4) ]M00-FF$28 CommunicationControl 该服务请求ECU控制其通信行为。一个典型的示例包括要求CAN总线中的ECU关闭车载通信,以提高诊断通信的效率。 Data byte数据字节Parameter name参数名称Cvt约定Hex value十六进制数值1CommunicationControl Request Service IdM282sub-function = [controlType ]M00, 01, 02, 033communicationTypeM01, 02, 03$3E TesterPresent TesterPresent请求通常定期发送,并包含一个功能地址。它指示测试仪仍处于连接状态(存在),并请求ECU保持当前诊断状态(例如,除默认会话之外的其他会话处于活动状态,RoE机制仍处于活动状态)。对这个服务的正响应抑制可以减少总线负载。 $83 AccessTimingParameter 该请求用于读取和/或修改通信定时参数。 $84 SecuredDataTransmission 此请求用于传输受加密方法保护的诊断数据。为此,必须实现位于应用程序层与测试仪和ECU的应用程序之间的“安全子层”。数据根据ISO 15764(扩展数据链接安全性)进行处理。 $85 ControlDTC设置 该服务要求ECU停止/恢复DTC的设置。将此服务与车载通信切换 (服务$28通讯控制)相结合,可增加用于Flash编程的速度。 Data byte 数据字节Parameter name参数名称Cvt 约定Hex value 十六进制数值1ControlDTCSetting Request Service IdM852sub-function = [DTCSettingType ]M01,02$86 ResponseOnEvent 事件响应(RoE)服务请求ECU自动传输指定事件的响应。 $87 LinkControl 该服务请求控制通信数据速率。对于CAN,它会影响ISO 11898中规定的数据链路层,从而影响用于板载通信以及诊断通信的数据速率。转换数据速率的请求分为(1)验证网络上的ECU是否允许特定的数据速率;(2)在验证结果为肯定的情况下请求转换;以及(3)执行转换。 2.2.2 数据传输功能单元$22 ReadDataByldentifier 该服务请求读取由DID参数标识的数据记录值。DID用于标识特定的本地数据记录。数据标识符$F224可以包含诸如电池电压,歧管绝对压力,空气质量流量,车辆大气压以及计算出的负载值之类的数据。 Data byte 数据字节Parameter name 参数名称Cvt 约定Hex value 十六进制数值1ReadDataByIdentifier Request Service IdM2223dataIdentifier[ ] = [byte #1byte #2 ]M M00-FF00-FF$23 ReadMemory ByAddress 该服务请求读取指定内存范围的当前值。请求参数是内存地址和内存大小。用于请求参数的字节数在addressAndLengthFormatldentifier中指定。 Data byte 数据字节Parameter name 参数名称Cvt 约定Hex value 十六进制数值1ReadMemoryByAddress Request Service IdM232addressAndLengthFormatIdentifier243: 6memoryAddress[ ] = [byte #1:byte #4 ]M:M00-FF: 00-FF78memorySize[ ] = [byte #1byte #2 ]M M00-FF00-FF$24 ReadScalingDataByidentifier 该服务请求ECU将缩放信息值传输到测试仪。测试人员使用定标信息值来转换数据。这项服务的实施增加了ECU软件的实用性。作为替代,测试器可以将缩放比例信息存储在数据库中。 $2A ReadDataUyPeriodicidentifier 该服务请求定期发送数据记录值。所请求的数据的传输速率由传输模式参数设置,例如“中等速率发送”,例如300 ms。 $2C DynamicallyDefineDataldentifier 该服务允许测试人员在ECU中动态定义新的数据标识符,其中包含对静态定义的标识符和/或内存地址的引用。测试人员随后可以通过服务请求()或2A(readDataByPeriodicIdentifier)读取此动态定义的数据记录。动态定义的标识符的一个优点是, 一次服务可以请求传输很多的的数据记录 $2E WriteDataByldentifier 通过此服务,可以将由标识符(DID)指定的数据记录写入ECU存储器。 Data byte 数据字节Parameter name 参数名称Cvt 约定Hex value 十六进制数值1WriteDataByIdentifier Request Service IdM2E23dataIdentifier[ ] = [byte #1byte #2 ]M M00-FF00-FF4:(k-1)+4dataRecord[ ] = [data #1:data #k ]M: U00-FF: 00-FF$3D WriteMemoryByAddress 该服务允许将数据记录直接写入ECU的内存。请求参数是内存地址和内存大小以及数据记录。用于参数内存地址和内存大小的字节数在addressAndLengthFormatidentifier中指定。 Data byte 数据字节Parameter name 参数名称Cvt 约定Hex value 十六进制数值1WriteMemoryByAddress Request Service IdM3D2addressAndLengthFormatIdentifierM243: 6memoryAddress[ ] = [byte #1:byte #4 ]M00-FF: 00-FF78memorySize[ ] = [byte #1byte #2 ]M U00-FF00-FF9:(k-1)+9dataRecord[ ] = [data #1:data #k ]M: U00-FF: 00-FFa 参数地址和长度格式标识符采用固定值0x24。 2.2.3 存储数据传输功能单元$14清除诊断信息 此服务允许在一个或多个ECU中清除错误存储器的内容。因此,可以使用物理地址或功能地址来请求服务。 Data byte 数据字节Parameter name 参数名称Cvt 约定Hex value 十六进制数值1ClearDiagnosticInformation Request Service IdM14234groupOfDTC = [groupOfDTCHighByte groupOfDTCMiddleByte groupOfDTCLowByte ]M M M00-FF00-FF00-FF$19 ReadDTC信息 诊断故障代码(DTC)用于编码和识别检测到的与排放有关和与排放无关的故障。DTC通常为三个字节,这意味着最多可以定义16,777,216个不同的DTC。该服务从一个或多个ECU请求DTC信息的状态。因此,该服务可以用物理地址或功能地址查询。测试人员可以请求与DTC关联的已存储数据记录,也称为“ DTC快照”。DTC快照包含故障发生时的特定数据值。 Data byte 数据字节Parameter name 参数名称Cvt 约定Hex value 十六进制数值1ReadDTCInformation Request Service IdM192sub-function = [reportNumberOfDTCByStatusMask reportDTCByStatusMask ]M01023DTCStatusMask aM00-FFa 诊断故障代码状态掩码的定义等同于诊断故障代码状态字节的定义 Data byte数据字节Parameter name参数名称Cvt约定Hex value十六进制数值1ReadDTCInformation Request Service IdM192sub-function = [reportDTCSnapshotRecordByDTCNumber ]M043,4,5DTCMaskRecord[ ] = [DTCHighByte DTCLowByte DTCFailureTypeByte ]M M M00-FF00-FF00-FF6DTCSnapshotRecordNumberM00,01,02,FF Data byte数据字节Parameter name参数名称Cvt约定Hex value十六进制数值1ReadDTCInformation Request Service IdM192sub-function = [reportDTCExtendedDataRecordByDTCNumber ]M06345DTCMaskRecord[ ] = [DTCHighByte DTCLowByte DTCFailureTypeByte ]M M M00-FF00-FF00-FF6DTCExtendedDataRecordNumberM01 Data byte数据字节Parameter name参数名称Cvt约定Hex value十六进制数值1ReadDTCInformation Request Service IdM192sub-function = [reportSupportedDTC ]M0A 2.2.4 输入输出控制功能单元$2F InputOutputControlByIdentifier 该服务主要用于代替输入信号的值和/或控制ECU的输出。通常,此服务会绕过ECU的应用程序软件并直接触发输出电路,然后直接读取连接到输入电路的传感器。 Data byte 数据字节Parameter name 参数名称Cvt 约定Hex value 十六进制数值1InputOutputControlByIdentifier Request Service IdM2F2 . 3dataIdentifier[ ] = [byte#1 (MSB) byte#2 (LSB) ]M00-FF .00-FF4inputOutputControlParameter = [returnControlToECU freezeCurrentState ]00 025 .6controlEnableMaskRecord[ ] = [controlMask#1 controlMask#2 ]M/ M00-FF .00-FF Data byte 数据字节Parameter name 参数名称Cvt 约定Hex value 十六进制数值1InputOutputControlByIdentifier Request Service IdM2F2. 3dataIdentifier[ ] = [byte#1 (MSB) byte#2 (LSB) ]M00-FF. 00-FF4inputOutputControlParameter = [shortTermAdjustment ]M035. 6controlState[ ] = [controlState#1 controlState#2 ]M00-FF. 00-FF7. 8controlEnableMaskRecord[ ] = [controlMask#1 controlMask#2 ]M00-FF. 00-FF 例程服务单元$31例程控制 该服务用于维护和停止ECU内部例程。可以读取例程的结果以进行分析。该例程由两个字节的例程identifier标识。 1RoutineControl Request Service IdM312sub-function = [routineControlType ]M01, 02 ,0334routineIdentifier[ ] = [byte#1 (MSB) byte#2 (LSB) ]M M00-FF00-FF5:(m-1)+5routineControlOptionRecord[ ] = [routineControlOption#1:routineControlOption#m ]U: U00-FF: 00-FF 2.2.5上传下载功能单元$34请求下载 此服务启动从测试仪到ECU的数据传输。当ECU准备从测试仪接收数据时,它会发送肯定响应,其中包含用于后续数据传输的可用块大小(每个传输数据请求的数据字节数) 1RequestDownload Request Service IdM342dataFormatIdentifierM003addressAndLengthFormatIdentifierM444memoryAddress[ ] = [byte #1:byte #4 ]M00- FF︰︰700-FF8memorySize[ ] = [byte #1:byte #4 ]M00-FF︰︰1100-FF$35请求上传 此服务启动从ECU到测试仪的数据传输。当ECU准备好将数据发送到测试仪时,它会发送一个肯定的响应,其中包含用于后续数据传输的块大小(每个传输数据请求的数据字节数) $36 TransferData 此服务用于在测试仪和ECU之间(下载)或在ECU和测试仪之间(向上)传输数据。如果需要一个以上的transferData请求来传输数据,则使用blockSequenceCounter对传输次数进行计数。计数器允许在传输损坏后重复传输块。因此,在出现通信问题时,不必再次传输完整的数据 1TransferData Request Service IdM362blockSequenceCounterM00-FF3︰ 3+(m-1)transferRequestParameterRecord[] = [transferRequestParameter#1:transferRequestParameter#m ]C︰C00-FF︰00-FF$37 RequestTransferExit 该服务用于终止transferData服务。完整的数据传输从requestDownloadrequestUpload服务开始,再由几个transferData服务继续,并由requestTransferExit服务完成。 数据字节参数名称约定十六进制值1RequestTransferExit Request Service IdM372CRCTypeM00,01 3 基于CAPL的诊断服务举例 3.1 CAPL介绍“ CAPL”是通信访问编程语言的缩写。其目标是尽可能简单地解决特定任务。典型的任务是对接收到的消息做出反应,检查和设置信号值并发送消息。 CAPL程序是事件驱动的。这意味着它们由各自的功能组成,每个功能都对被分析系统中的事件做出反应:接收消息,信号的改变,定时器到期,甚至环境变量的变化。 例如,要对接收到的消息“ EngineState”作出反应,可以使用: On message EngineState { //USER DEFINED FUNCTION }消息名称为“ EngineState”和该消息中的信号的名称为“ EngineSpeed” 。 // Used for display purposes. on message EngineState { @sysvar::Display::SetRPM = this.EngineSpeed / 1000.0; }和C语言一样,可通过include和varibles去包含头文件和定义变量。但CAPL程序不向用户提供要使用的任何指针类型,而是通过this实现特定对象的绑定。 includes { //include head file } variables { message 0x100 DiagnosisID={dlc=8}; const byte PostiveResponse_0xF192[9] = {0x62,0xF1,0x92,0x33,0x31,0x32,0x34,0x41,0x42}; const byte P2_Timer = 200; msTimer tFlashLightFrequency; } 3.2 诊断服务实例分析下面的例子使用多个不同服务来执行复杂的诊断过程,以完成在ECU的内存中编写一个新的变体信息和写入日期的目的。 - 步骤1:开启ECU ECU上电后,诊断软件堆栈初始化,等到ECU中的诊断服务器初始化完成后,ECU处于默认会话中。测试仪在此之前应禁止其传输服务,否则服务会丢失。 但是诊断仪可以做一些内部的初始化工作。如启动CANOE后调用以下函数:
-步骤2:读取ECU识别码 必须读取ECU硬件的标识符,检查变体之后决定是否更新变体编码。服务 22(readDataByldentifier)【字节1】与数据标识符 Fl 92(systemSupplierECUHardwareNumberDataldentifier)【字节2和3】一起发送。
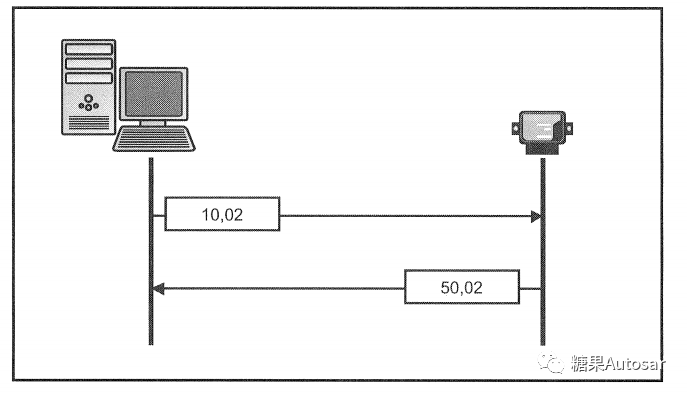
肯定响应:服务标识符($ 62),字节2($ F1)和字节3($ 92)数据标识符。字节4至9,$ [33,31,32,34,41,42]包含六个ASCII字符“ 3124AB”,用于识别ECU软件。测试人员将此字符串与内部存储的参考值进行比较。 肯定的响应意味着ECU硬件与随后诊断操作兼容,这对于编写变体代码是必需的。 -步骤3:切换到Programmmg会话层 ECU收到从默认会话层切换到编程会话层的请求,子功能字节的数据参数指定了DiagnosticSessionType。ECU使用子功能字节$02指定编程会话层的类型。 ECU发送肯定响应服务标识符 50 以响应请求 50以响应请求 50以响应请求 10。$ 02反映了请求的会话类型,并表明ECU将执行转换到编程会话层。
-步骤4:安全访问 为了提高安全性,测试人员必须向ECU请求种子。为此,测试仪发送一个$ 27(securityAccess)以及子功能参数$ 01(requestSeed)。 ECU传输肯定响应服务标识符($ 67)和子功能字节($ 01)。 接下来的四个字节$[12,34,56,78)包含种子。 void SecurityAccess_0x2701 (void) { //Request ECU seed :糖果Autosar write(" Request ECU seed"); DiagnosisID.byte(0)=0x02; DiagnosisID.byte(1)=0x27; DiagnosisID.byte(2)=0x01; DiagnosisID.byte(3)=0x00; DiagnosisID.byte(4)=0x00; DiagnosisID.byte(5)=0x00; DiagnosisID.byte(6)=0x00; DiagnosisID.byte(7)=0x00; output(DiagnosisID); } void SecurityAccess_0x2703 (void) { //Request to send ECU key :糖果Autosar write(" Request to send ECU key"); DiagnosisID.byte(0)=0x06; DiagnosisID.byte(1)=0x27; DiagnosisID.byte(2)=0x02; DiagnosisID.byte(3)=0x9A; DiagnosisID.byte(4)=0xBC; DiagnosisID.byte(5)=0xDE; DiagnosisID.byte(6)=0xF0; DiagnosisID.byte(7)=0x00; output(DiagnosisID); }
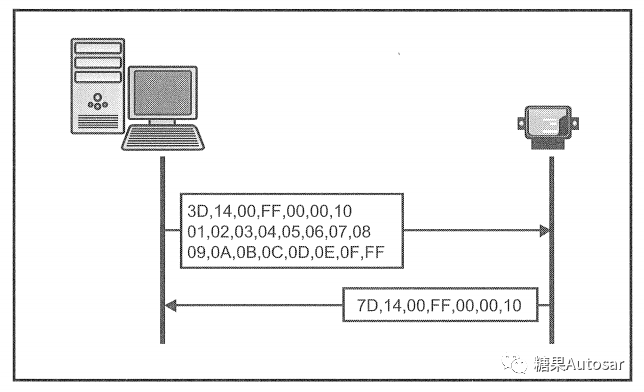
现在,测试人员必须使用机密算法从种子计算密钥。 然后,测试人员再次发送服务请求$ 27(securityAccess)。字节2现在包含值$02(sendKey),该值指示测试人员将发送密钥。字节3至6 $ [9A,BC,DE,FO]包含计算出的密钥。 ECU将密钥与内部计算的参考值进行比较,如果两个值相同,则接受密钥。如果是这样,则ECU传输带有子功能字节($ 02)的肯定响应($ 67)。 服务$ 27(securityAccess)在默认会话中不可用。 -步骤5:烧写变体编码 测试仪发送了带有数据参数$ 14(addressAndLengthFormatfdentifier)的请求$ 3D(writeMemoryByAddress)。数据参数包含以下信息:四个字节内存地址$ [00,FF,00,00]在字节3到6中发送。请求的内存大小字节7为一个字节,指示内存地址的长度,字节7的值为$ 10,这意味着将写入存储区16个字节。字节8到23包含变体编码$ [01,02,03,04,05,06,07,08,09,0A,0B,0C,0D,0E,0F,FF]。
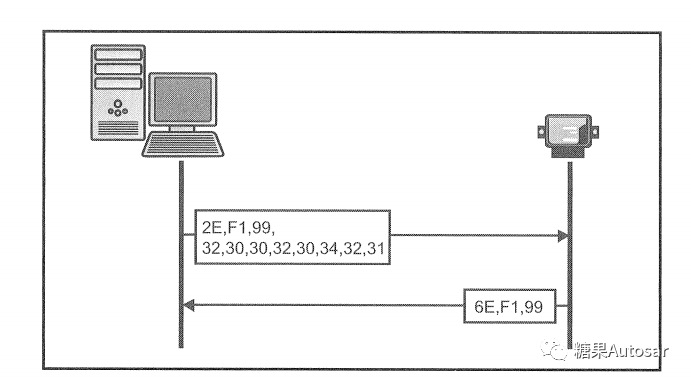
ECU发送肯定响应服务标识符($ 7D)和请求字节的参数$[14,00,FF,00,00,10]。 -步骤6:编写编程日期 出于归档和追溯的要求,最后一次编程(第5步)的日历日期将存储在ECU的内存中。测试器发送请求$ 2E(writeDataByidenlifier)和数据标识符$ [Fl,99](programmingDate) 字节4至10,$ [32,30,30,32,30,34,32,31]包含编程日期(2002年4月21日),编码为ASCII字符(20020421)。 ECU传输肯定响应服务标识符($ 6E)和对应的数据标识符。
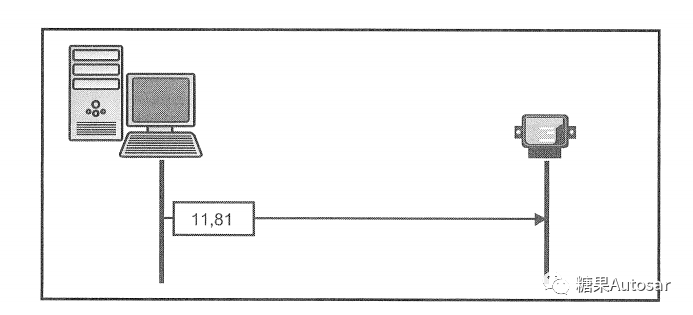
-步骤7:重置ECU 在示例的最后一步,测试人员通过发送请求$ 1 1和子功能字节$ 81来重置ECU。 suppressPosRspMsgIndicationBit的值为1(TRUE),表示ECU将抑制对此服务的肯定响应。即ECU不发送响应并完成复位。 子功能字节的其他七个位指定了ECU进行复位的类型,本例中为hardReset。 重置后,ECU处于默认会话活动状态
CAN_DRV为系统的CAN硬件驱动。通过与硬件寄存器的交互,驱动提供了对CAN模块初始化以及收、发CAN Frame的接口函数。 CAN_IF通过对CAN底层驱动提供的接口进行封装,实现了网络层功能模块与硬件底层驱动之间的隔离。因此,当需要将该网络层移植到其他平台时,只需要依据新平台的CAN底层驱动对CAN_IF模块进行更新,而不需要对网络层主体功能模块作出修改,从而大大增强了模块的可移植性和可重用性。 TP_NL模块是网络层的主体功能模块,其功能是将来来自上层(应用层)的A_PDU解包成N_PDU, 并按照ISO-15765-2中描述的Segmented Message发送方式通过DC_CANIF接口与下层(CAN底层驱动)进行数据交换。或者将通过CAN_IF接收到的N_PDU封装成A_PDU,并向上(应用层)传递。TP_NLCFG是对网络层参数进行配置的模块。 TP_ALIF模块是网络层与应用层之间的接口模块。其作用是接收经过网络层打包后的A_PDU,并传递给指定服务功能模块,以及将各功能模块对请求的应答数据重新封装成A_PDU后,传递给网络层进行进一步的发送过程。TP_ALIFCFG模块维护了一张描述各应用层功能模块与A_PDU中SID的对应关系,TP_ALIF模块通过这张表格就能够快速地找到SID与应用层服务程序入口地址的映射关系,并跳转执行。 4.1 TP_ALIF应用层状态机
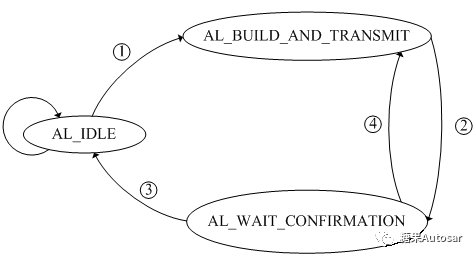
在程序初始化完成后,应用层接口处于空闲状态(AL_IDLE),并通过一个10ms的任务来查询是否有来自下层的诊断服务请求。当查询到网络层报告的服务请求时,应用层接口即进入AL_BULID_AND_TRANSMIT状态。在这个状态中,应用层接口根据A_PDU中的SID信息,执行特定的诊断服务函数,得到应答的A_PDU,并传递给网络层进行发送,同时应用层接口进入AL_WAIT_CONFIRMATION状态。在AL_WAI_CONFIRMATION状态中,应用层接口等待网络层反馈的发送状态,发送成功后(或超时)后,应用层重新回到AL_IDLE状态,并等待处理下一个服务请求。 若在AL_BULID_AND_TRANSMIT状态中,从某一个诊断服务程序处得到的应答为否定0x78(Response Pending),则状态机在进入AL_WAIT_CONFIRMATION后,自动重新回到AL_BUILD_AND_TRANSMIT状态,并重新进入这个未执行完毕的诊断服务程序中进行处理,如此往复直至服务执行完毕后,状态机进入AL_IDLE状态,并等待处理下一个服务请求。 4.2 TP_NL网络层接收状态机
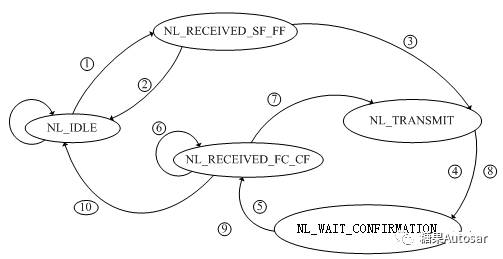
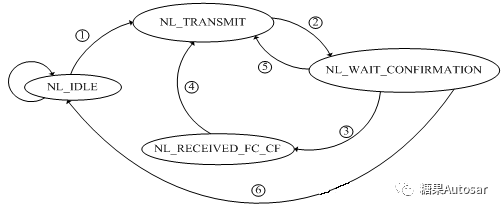
当诊断仪没有发送任何服务请求时,网络层处于空闲状态(NL_IDLE)。 当接收SF时,网络层进入NL_RECEIVED_SF_FF状态。由于SF中已经包含了请求A_PDU中完整的数据信息,此时,网络层即可向通过与应用层的接口(DC_ALIF)向上层传递A_PDU已收到的消息,并有应用层依据A_PDU中的请求内容执行相应的服务程序。同时,网络层回到NL_IDLE状态,准备处理由上层传来的应答A_PDU。 当网络层在等待服务请求时,接收到的时FF时,网络层同样会进入NL_RECEIVED_SF_FF,依据ISO-15765-2中定义的Segmented Message发送方式,网络层需要发送FC来控制数据流的继续发送。因此,网络层会进入NL_TRANSMIT状态,并发送FC。在发送FC后,网络层进入NL_WAIT_CONFIRMATION状态,并判断FC发送成功后,网路层跳转到NL_RECEIVED_FC_CF状态,并进行后续CF的接收。若有必要,则重复NL_TRANMIT → NL_WAIT_CONFIRMATION → NL_RECEIVED_FC_CF的过程,直至接收完所有的Segmented Message, 并打包成A_PDU后,传递给应用层进行处理。 在UDS的应用层模块执行完服务请求的操作后,会将服务应答填充到A_PDU中,并经由DC_ALIF传递给网络层。网络层在接收到来自上层的发送请求后,便会对A_PDU进行解包成为N_PDU后。如下图所示的状态机,完成N_PDU的发送。 4.3 TP_NL网络层发送状态机
系统的网络层在1ms任务中,对CAN底层驱动的接收情况进行轮询,同时处理网络层的CAN报文发送请求。如下图所示描述了网络层处于接收状态时的基本工作过程状态机。 当A_PDU的数据内容较少时(小于7个字节),A_PDU可以被解包成1个SingleFrame。在经过NL_TRANSMIT状态发送,并在NL_WAIT_CONFIRMATION中确认发送成功后,网络层即可回到NL_IDLE状态,开始等待诊断仪的下一个请求。 若A_PDU的数据内容较多,则N_PDU的发送必须采用Segmented Message的方式。首先,网络层在NL_TRANSMIT状态中发送FF,并在NL_WAIT_CONFIRMATION中确认FF发送成功。然后进入NL_RECEIVED_FC_CF状态中等待诊断仪发送的FC。在接收到有效的FC后,才能重新进入NL_TRANSMIT→ NL_WAIT_CONFIRMATION的循环进行后续CF的发送,直至发送完所有的N_PDU后,网络层重新回到N_IDLE状态,开始等待下一个诊断请求。 5 基于UDS规范的工具支持 5.1 诊断测试仪 Indigo快速且易于操作的诊断测试仪,适用于单个ECU或整个车辆 CANoe / CANalyzer支持带有ECU诊断功能的仿真和测试工具 CANape 支持带有ECU标定功能的测量和校准工具 5.2 Flash编程 vFlash 通过CAN,CAN FD,LIN,FlexRay,以太网(DoIP)刷写ECU。 5.3 诊断验证 CANoe.DiVa 通过数据驱动的测试案例生成,自动验证ECU中的诊断实现。 5.4 诊断规范/编写 CANdelaStudio 基于CDD格式模板的ECU诊断数据规范。支持ODX数据的导入和导出。ODXStudio 支持查看,编辑和比较ODX 2.0.1和2.2.0数据文件 6 基础诊断软件堆栈 MICROSAR.DIAGMICROSAR.DIAG包含BSW模块,支持根据AUTOSAR Classic实现基于UDS协议ISO 14229-1:2006(分别是ISO 14229-1:2013)协议开发的ECU诊断功能。 |
 UDS服务的协议数据单元(PDU)包含地址信息和诊断消息(数据字段)。数据字段由服务标识符组成(SID)和可选的数据参数组成。数据字段由一字节长的服务标识符来控制服务的功能(这一个字节也可理解成为是Appliction layer的协议控制信息)。
UDS服务的协议数据单元(PDU)包含地址信息和诊断消息(数据字段)。数据字段由服务标识符组成(SID)和可选的数据参数组成。数据字段由一字节长的服务标识符来控制服务的功能(这一个字节也可理解成为是Appliction layer的协议控制信息)。 如下表所示,N_PCI的值主要集中在前三个字节,N_DATA值主要集中在后面7位字节。其中,SF_DL 代表单帧中数据个数,FF_DL代表 连续帧中的数据总数,SN代表此帧为连续帧中的第几帧, FS参数控制发送端是否能继续传输数据,BS规定发送端允许持续传输连续帧数目的最大值,STmin限定连续帧相互之间所允许的最小值。
如下表所示,N_PCI的值主要集中在前三个字节,N_DATA值主要集中在后面7位字节。其中,SF_DL 代表单帧中数据个数,FF_DL代表 连续帧中的数据总数,SN代表此帧为连续帧中的第几帧, FS参数控制发送端是否能继续传输数据,BS规定发送端允许持续传输连续帧数目的最大值,STmin限定连续帧相互之间所允许的最小值。 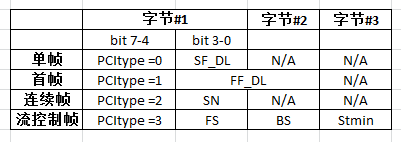
 a. SID是服务标识符的缩写。
a. SID是服务标识符的缩写。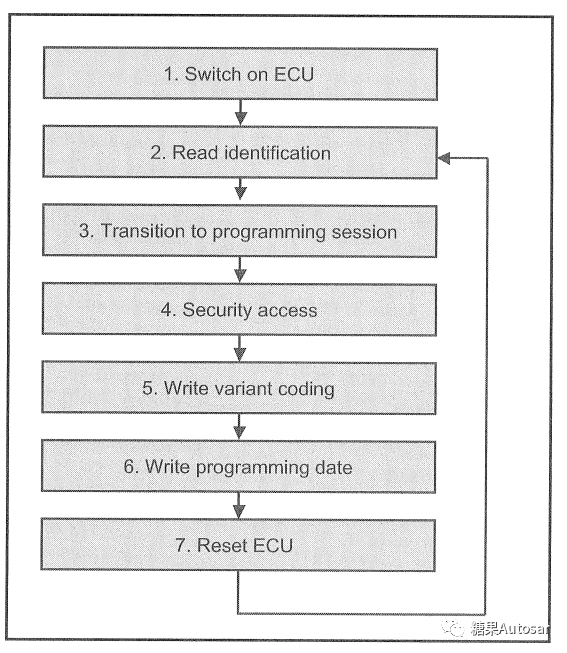
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-h3MCk1EA-1642906410096)(data:image/gif;base64,iVBORw0KGgoAAAANSUhEUgAAAAEAAAABCAYAAAAfFcSJAAAADUlEQVQImWNgYGBgAAAABQABh6FO1AAAAABJRU5ErkJggg==)]](https://img-blog.csdnimg.cn/3bf20471dfc14b428f21437ab73d1b3a.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-va240i4y-1642906410098)(data:image/gif;base64,iVBORw0KGgoAAAANSUhEUgAAAAEAAAABCAYAAAAfFcSJAAAADUlEQVQImWNgYGBgAAAABQABh6FO1AAAAABJRU5ErkJggg==)]](https://img-blog.csdnimg.cn/6683fe347f22436898785bfa7d8c2fc3.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA57OW5p6cQXV0b3Nhcg==,size_19,color_FFFFFF,t_70,g_se,x_16)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-QZf5FWhD-1642906410103)(data:image/gif;base64,iVBORw0KGgoAAAANSUhEUgAAAAEAAAABCAYAAAAfFcSJAAAADUlEQVQImWNgYGBgAAAABQABh6FO1AAAAABJRU5ErkJggg==)]](https://img-blog.csdnimg.cn/e8f116a69c764b1a86d504459bcf0a2f.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA57OW5p6cQXV0b3Nhcg==,size_19,color_FFFFFF,t_70,g_se,x_16)
【本文地址】