| Guided Image Filtering导向滤波通俗易懂 | 您所在的位置:网站首页 › 论文gif › Guided Image Filtering导向滤波通俗易懂 |
Guided Image Filtering导向滤波通俗易懂
|
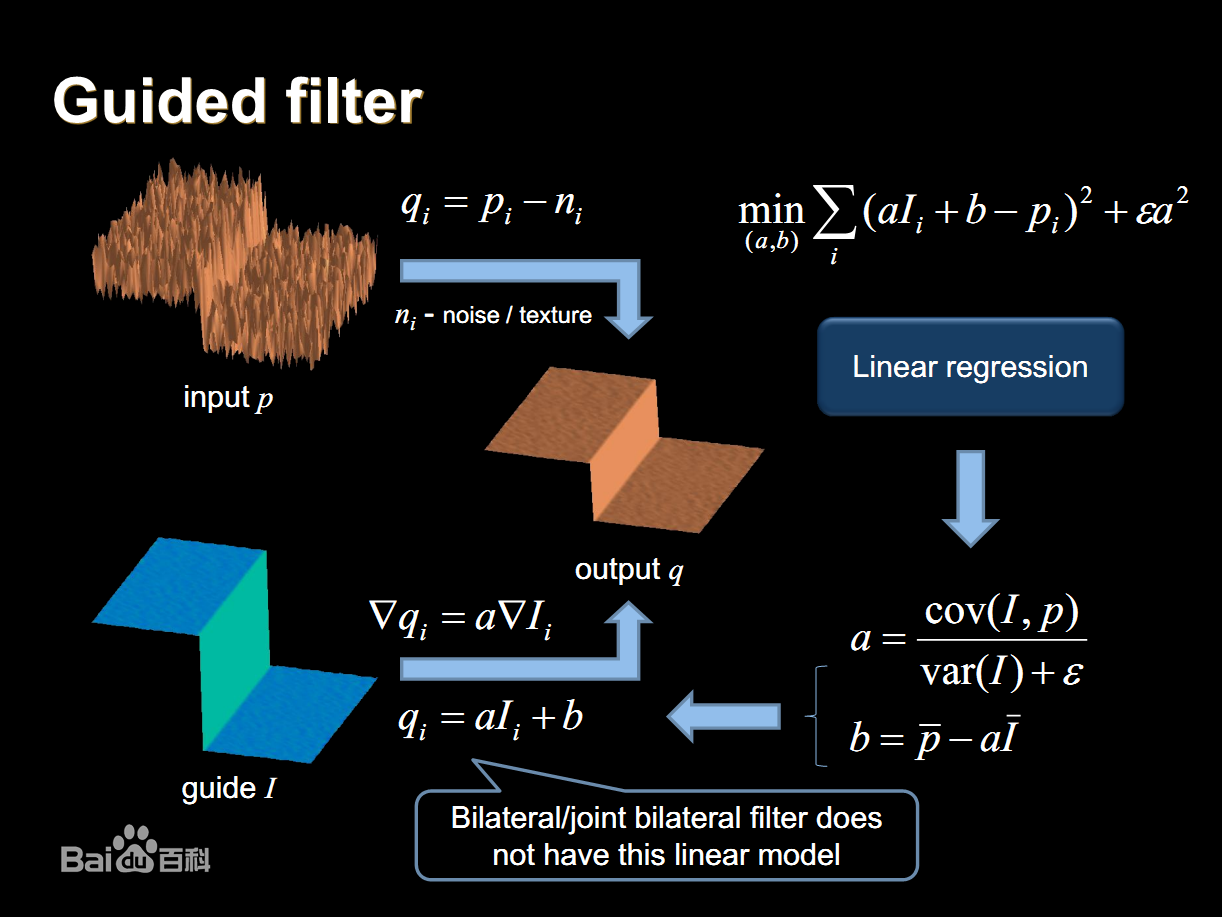
本文素材主要来自何凯明的导向滤波,需要更精细的理解可以拜读原文 1.优点 ———————————————————— 噪声和边缘的区别,噪声一般周围的像素梯度变化较大,并且以其为中心,向四周的梯度大体相似。而边缘出现了梯度的阶跃,并且梯度最大的方向在边缘的法线方向,其他方向远离法线方向逐渐变小。一般的滤波无法区分噪声和边缘,于是对其统一处理,因此很多情况下,滤波的同时,边缘也被处理模糊了。 2.处理方法 ———————————————————— 从图中也可以看出,导向滤波的输入为两个,一个是真实的输入p,另一个是引导输入I。输出为q,是p和I共同作用的产物。
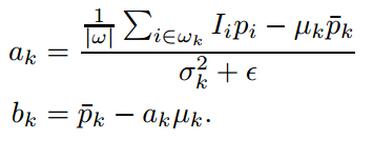
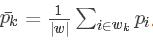
由上图可以看出q=aI+b是线性方程,因此可以说我们使用的导向图的要求就是导向图和图像是线性关系。导向图可以告诉输入,哪里是边缘,哪里是平面,这样输入就可以利用这些信息进行滤波。现在我们可以设想,有三块区域,其中两块是平面(平滑区域),在平滑区域图像的像素变化率较小,因此梯度较小。在边缘区域图像像素变化率较大因此梯度较大。这里说明一点--a,b是当前窗的线性函数系数,a,b不是固定的,不同位置的窗,a,b不同。当同时对输出和导向图进行求梯度时,可以看出两者的梯度是一个系数a的关系,因此完全可以用导向图的梯度来知道输出图像q的梯度。 上面的q=p-n,其中n就是噪声。 噪声n是我们所不希望看到的,因此我们的优化就是让噪声n取到最小 上述公式就是用最小二乘来求解最小值问题。 其中的eak是最小二乘时引入的乘法项。此处何凯明教授是用岭回归来代替普通线性回归。 μk是图像I中窗wk像素的平均值,σk2为窗wk的方差,|w|为窗像素总数,pk为待滤波图像p在窗wk中的像素均值
|
 该公式的Wij(I)为Pj加权平均时所用到的权值,该权值可以来自一副单独的图像,也可以来自图p。
该公式的Wij(I)为Pj加权平均时所用到的权值,该权值可以来自一副单独的图像,也可以来自图p。

 可以发现一个像素点是被多个窗包围的,因此算该点像素就是需要算所有包含该点的窗在该点像素的平均
可以发现一个像素点是被多个窗包围的,因此算该点像素就是需要算所有包含该点的窗在该点像素的平均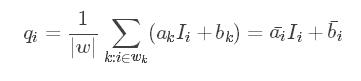

【本文地址】