| 触摸屏驱动编写 | 您所在的位置:网站首页 › 触摸屏编写 › 触摸屏驱动编写 |
触摸屏驱动编写
|
触摸屏要使用到输入子系统
分析之前的输入子系统 输入子系统详解 用linux里面的 input.c 用两边的probe 匹配系统里的软件控制和驱动 写出框架 我们要写的就是 input_dev 分配一个input_dev结构体 设置 注册 硬件相关的操作 由于触发按键 中断时候 要用到 input_event 来上报事件
产生按键类事件 产生触摸屏绝对位移事件
先来看看触摸屏使用的过程 打开cpu的原理图 这个ADC转换是 8:1 转换 左边八个物理信号选择一个转换为数字信号 在 SOC 里面 有各种各样的模块 为了省电 一般是关的 这时候 要爆我们的ADC打开 在芯片手册里面找到寄存器 A/D 转换器预分频器使能设置为1 当按下 和松开时 会产生中断 注册中断函数 pen_down_up_irq
进入这个模式之后 ,使用ADC转换,启动adc
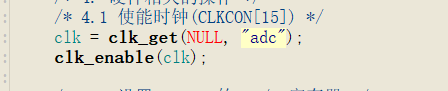
用延时值,ADCDLY,当稳定的时候才发出中断 ADC启动需要一定的时间,有时候触摸已经松开,才完成启动,就把这个测量失误的值丢弃,并且多次测量 建立一个数组,x,y都保存4次,再取平均值 没到4次的话再次启动ADC测量 当四个值中差距太大了,出现了测量错误,应该丢弃 创建一个定时器,设置定时器功能,增加这个定时器 完整代码 #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include struct s3c_ts_regs { unsigned long adccon; unsigned long adctsc; unsigned long adcdly; unsigned long adcdat0; unsigned long adcdat1; unsigned long adcupdn; }; static struct input_dev *s3c_ts_dev; static volatile struct s3c_ts_regs *s3c_ts_regs; static struct timer_list ts_timer; static void enter_wait_pen_down_mode(void) { s3c_ts_regs->adctsc = 0xd3; } static void enter_wait_pen_up_mode(void) { s3c_ts_regs->adctsc = 0x1d3; } static void enter_measure_xy_mode(void) { s3c_ts_regs->adctsc = (1 #define ERR_LIMIT 10 int avr_x, avr_y; int det_x, det_y; avr_x = (x[0] + x[1])/2; avr_y = (y[0] + y[1])/2; det_x = (x[2] > avr_x) ? (x[2] - avr_x) : (avr_x - x[2]); det_y = (y[2] > avr_y) ? (y[2] - avr_y) : (avr_y - y[2]); if ((det_x > ERR_LIMIT) || (det_y > ERR_LIMIT)) return 0; avr_x = (x[1] + x[2])/2; avr_y = (y[1] + y[2])/2; det_x = (x[3] > avr_x) ? (x[3] - avr_x) : (avr_x - x[3]); det_y = (y[3] > avr_y) ? (y[3] - avr_y) : (avr_y - y[3]); if ((det_x > ERR_LIMIT) || (det_y > ERR_LIMIT)) return 0; return 1; } static void s3c_ts_timer_function(unsigned long data) { if (s3c_ts_regs->adcdat0 & (1 /* 测量X/Y坐标 */ enter_measure_xy_mode(); start_adc(); } } static irqreturn_t pen_down_up_irq(int irq, void *dev_id) { if (s3c_ts_regs->adcdat0 & (1 //printk("pen down\n"); //enter_wait_pen_up_mode(); enter_measure_xy_mode(); start_adc(); } return IRQ_HANDLED; } static irqreturn_t adc_irq(int irq, void *dev_id) { static int cnt = 0; static int x[4], y[4]; int adcdat0, adcdat1; /* 优化措施2: 如果ADC完成时, 发现触摸笔已经松开, 则丢弃此次结果 */ adcdat0 = s3c_ts_regs->adcdat0; adcdat1 = s3c_ts_regs->adcdat1; if (s3c_ts_regs->adcdat0 & (1 // printk("adc_irq cnt = %d, x = %d, y = %d\n", ++cnt, adcdat0 & 0x3ff, adcdat1 & 0x3ff); /* 优化措施3: 多次测量求平均值 */ x[cnt] = adcdat0 & 0x3ff; y[cnt] = adcdat1 & 0x3ff; ++cnt; if (cnt == 4) { /* 优化措施4: 软件过滤 */ if (s3c_filter_ts(x, y)) { printk("x = %d, y = %d\n", (x[0]+x[1]+x[2]+x[3])/4, (y[0]+y[1]+y[2]+y[3])/4); } cnt = 0; enter_wait_pen_up_mode(); /* 启动定时器处理长按/滑动的情况 */ mod_timer(&ts_timer, jiffies + HZ/100); } else { enter_measure_xy_mode(); start_adc(); } } return IRQ_HANDLED; } static int s3c_ts_init(void) { struct clk* clk; /* 1. 分配一个input_dev结构体 */ s3c_ts_dev = input_allocate_device(); /* 2. 设置 */ /* 2.1 能产生哪类事件 */ set_bit(EV_KEY, s3c_ts_dev->evbit); set_bit(EV_ABS, s3c_ts_dev->evbit); /* 2.2 能产生这类事件里的哪些事件 */ set_bit(BTN_TOUCH, s3c_ts_dev->keybit); input_set_abs_params(s3c_ts_dev, ABS_X, 0, 0x3FF, 0, 0); input_set_abs_params(s3c_ts_dev, ABS_Y, 0, 0x3FF, 0, 0); input_set_abs_params(s3c_ts_dev, ABS_PRESSURE, 0, 1, 0, 0); /* 3. 注册 */ input_register_device(s3c_ts_dev); /* 4. 硬件相关的操作 */ /* 4.1 使能时钟(CLKCON[15]) */ clk = clk_get(NULL, "adc"); clk_enable(clk); /* 4.2 设置S3C2440的ADC/TS寄存器 */ s3c_ts_regs = ioremap(0x58000000, sizeof(struct s3c_ts_regs)); /* bit[14] : 1-A/D converter prescaler enable * bit[13:6]: A/D converter prescaler value, * 49, ADCCLK=PCLK/(49+1)=50MHz/(49+1)=1MHz * bit[0]: A/D conversion starts by enable. 先设为0 */ s3c_ts_regs->adccon = (1 |





 ** input_set_abs_params(s3c_ts_dev, ABS_X, 0, 0x3FF, 0, 0); input_set_abs_params(s3c_ts_dev, ABS_Y, 0, 0x3FF, 0, 0);** 里面的参数 0x3FF 从cup芯片手册上面找到
** input_set_abs_params(s3c_ts_dev, ABS_X, 0, 0x3FF, 0, 0); input_set_abs_params(s3c_ts_dev, ABS_Y, 0, 0x3FF, 0, 0);** 里面的参数 0x3FF 从cup芯片手册上面找到 
 产生的大小是10位 也就是最大 0x3FF input_set_abs_params(s3c_ts_dev, ABS_PRESSURE, 0, 1, 0, 0); 压力值设置 该触摸屏 不是放下就是松开 所以只有0 和1
产生的大小是10位 也就是最大 0x3FF input_set_abs_params(s3c_ts_dev, ABS_PRESSURE, 0, 1, 0, 0); 压力值设置 该触摸屏 不是放下就是松开 所以只有0 和1

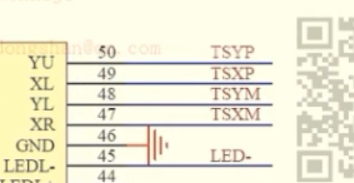
 看了看 芯片手册
看了看 芯片手册  这几个引脚 就是用来做ADC的 不用专门的设置
这几个引脚 就是用来做ADC的 不用专门的设置

 给这些寄存器定义一个结构体
给这些寄存器定义一个结构体 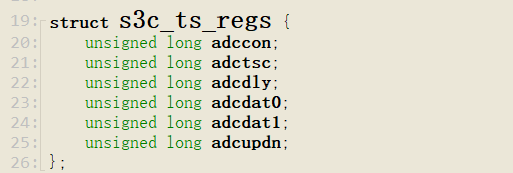 设置指针指向这个结构体
设置指针指向这个结构体 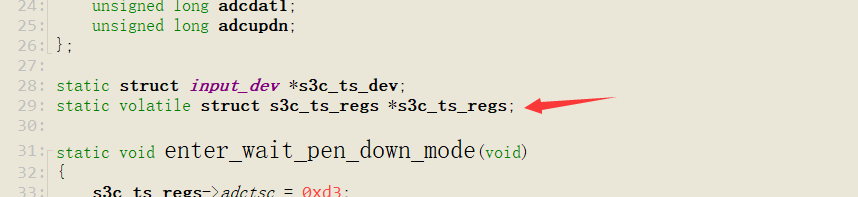 ioremap 这些地址
ioremap 这些地址  进入内核 看工作时钟的频率 FCLK : cpu工作时钟 HCLK : 内存工作时钟 PCKL : 外设工作时钟
进入内核 看工作时钟的频率 FCLK : cpu工作时钟 HCLK : 内存工作时钟 PCKL : 外设工作时钟 
 A/D 转换器预分频值设置 芯片手册里面有个例子 之前找到了 PCLK是50MHz 所以 prescaler value =49
A/D 转换器预分频值设置 芯片手册里面有个例子 之前找到了 PCLK是50MHz 所以 prescaler value =49  A/D conversion starts by enable. 先设为0 用到时候再打开
A/D conversion starts by enable. 先设为0 用到时候再打开 这时候 写出这个中断函数 由于会有 按下和松开 所以要分开判断 在芯片手册中 读取ADCDATA0 的15位 进行判断
这时候 写出这个中断函数 由于会有 按下和松开 所以要分开判断 在芯片手册中 读取ADCDATA0 的15位 进行判断  当松开的时候 进入等待按下模式 等待下一次被按下
当松开的时候 进入等待按下模式 等待下一次被按下 
 当按下的时候 进入测量 xy 坐标模式
当按下的时候 进入测量 xy 坐标模式 这时候 写出测量xy的函数 芯片手册中有一个自带的x,y 坐标测量模式
这时候 写出测量xy的函数 芯片手册中有一个自带的x,y 坐标测量模式  根据提示设置enter_measure_xy_mode()函数
根据提示设置enter_measure_xy_mode()函数
 于此同时当被按下的时候根据原理图 上拉电阻都是断开的
于此同时当被按下的时候根据原理图 上拉电阻都是断开的 
 写出函数
写出函数 
 ADC不会瞬间完成,当ADC好了之后,会产生一个ADC中断,注册一个ADC中断函数
ADC不会瞬间完成,当ADC好了之后,会产生一个ADC中断,注册一个ADC中断函数  同时写出这个ADC中断函数 ,函数里面可以找到,当前的XY的电压值 x的电压值 在ADCDATA0里面
同时写出这个ADC中断函数 ,函数里面可以找到,当前的XY的电压值 x的电压值 在ADCDATA0里面  y的电压值 在ADCDATA1里面
y的电压值 在ADCDATA1里面  先在中断函数里面 打印出ADC的电压值
先在中断函数里面 打印出ADC的电压值 



 写下定时器的功能
写下定时器的功能  在测值时候加入定时器
在测值时候加入定时器 
【本文地址】