| 自动驾驶系统入门(一) | 您所在的位置:网站首页 › 视觉感知能力是什么意思 › 自动驾驶系统入门(一) |
自动驾驶系统入门(一)
|
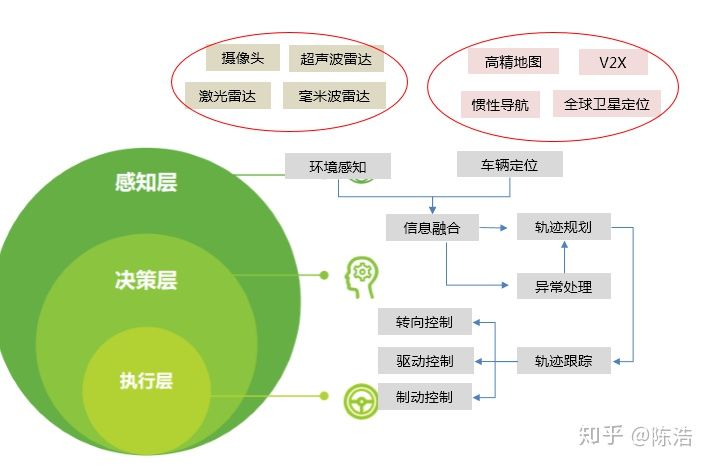
资源来源知乎--我这边做个记录 一、自动驾驶系统基本构成
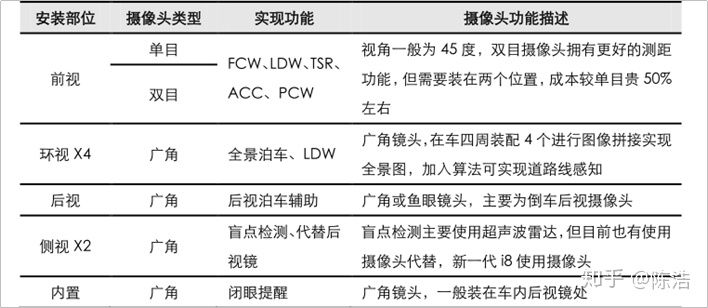
2.1 视觉传感器在ADAS系统中的应用 目前摄像头在ADAS系统中主要用于车道线检测、交通标示识别、行人/车辆识别等任务;
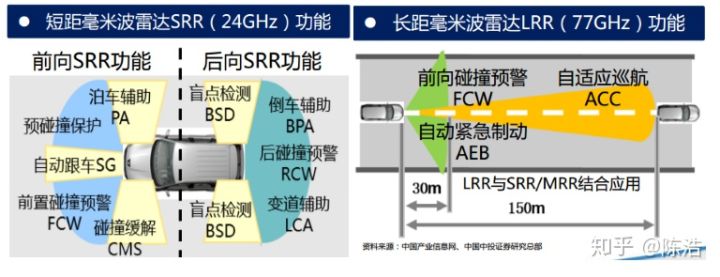
2.2 视觉传感器在自动驾驶系统中的主要作用 a、障碍物探测 - 测速和测距 b、车道线的检测:1)识别出车道线(对于弯曲的车道线,能够计算出曲率);2)确定车辆自身相对于车道线的偏移 c、道路信息读取:交通信号灯识别,交通标志识别 d、地图构建与辅助定位 e、其他交通参与者探测与识别 - 车辆探测、行人探测、动物探测 2.3 目前智能驾驶车辆上视觉传感器的类型及优劣势分析 2.3.1 类型 :智能前视摄像头(单目/双目)、广角摄像头、夜视红外摄像头 2.3.2 视觉传感器的优劣势分析: 1)优势: a、成本低,技术成熟,通过优化算法可实现多种功能; b、人和物体的区分,是优先级的区分; c、能够识别物体的性质和外观 - 读取外部信息 d、基于视频流建立外部环境模型; 2)劣势: a、干扰和限制比较多;例如 隧道口车辆与隧道重影、正面强光炫目、摄像头前方有水滴遮挡等复杂情况; b、环境的影响比较大;例如恶劣天气(如暴雨,暴风雪等)、能见度差(雾霾、烟、黑夜、隧道)、雨天车辆倒影 c、识别距离小于长距离激光雷达,测距/测速功能性差 d、物体识别基于机器学习数据库,需要的训练样本大, 训练周期长,难以识别非标准障碍物; 三、环境感知 - 毫米波雷达传感器3.1 毫米波雷达传感器在汽车中的应用
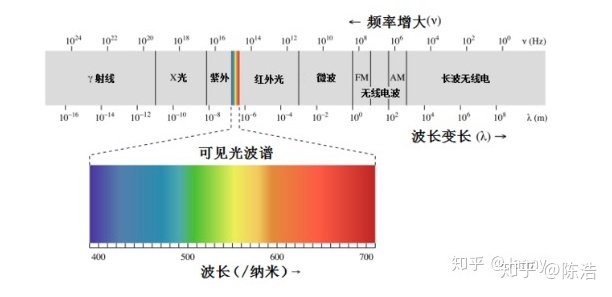
3.2 毫米波雷达工作特性分析 毫米波雷达的工作频段为30-300GHz,波长范围为1~10mm,介于厘米波和光波之间,因此毫米波兼具有微波制导和光电制导的优点。目前车载微波雷达主流可用频段为24GHz和77GHz。 毫米波雷达的优劣势分析 优势: 1)环境适应性强,具有全天候、全天时工作特性 - 不受天气状况限制,即使是雨雪天都能正常工作;穿透能力强,雨、雾、灰尘等对毫米波雷达干扰较小;探测新能稳定,不受对象表面形状和颜色的影响; 2)目标探测能力具有独特优势:a、纵向目标探测距离与速度探测能力强;b、可实现远距离感知与探测;c、对于静态和动态目标均能作出高精度测量; 劣势: 1)可视范围角度偏小,一般需要多个雷达组合使用; 2)分辨率不是很高,探测距离近的物体时无法准确分辨位置;例:无法分辨相邻车道上的汽车; 3)易受电磁波的干扰,不能用含金属的物体遮挡,也无法检测上过漆的木头或是塑料; 4)行人的反射波弱,难以识别; 5)在大桥和隧道里检测效果较差 6)目前尚无法进行图像、颜色信息识别,且无法感知平面内信息; 7)对横向目标敏感度低;(摄像头的横向目标探测能力优于毫米波雷达) 8)高度信息缺失,只提供角度和距离信息,不能像激光雷达那样提供高度信息; 四、环境感知 - 激光雷达传感器4.1 激光雷达的工作特性分析 激光雷达工作在红外和可见光频段,根据探测原理,激光雷达分为单线(二维)激光雷达和多线(三维)激光雷达;目前车载激光雷达均为三维激光雷达,波长多为905nm,且以4线、8线、16线、32线与64线最为常见;
4.2 激光雷达在自动驾驶系统中的主要作用: a、障碍物探测 - 测速和测距 b、车道线的检测:1)识别出车道线(对于弯曲的车道线,能够计算出曲率);2)确定车辆自身相对于车道线的偏移 c、地图构建与辅助定位 d、其他交通参与者探测与识别 - 车辆探测、行人探测、动物探测 注:相较于视觉传感器的:无道路信息读取功能,即无法识别交通信号灯和交通标志等信息; 4.3 激光雷达相较于其他感知传感器的优劣势分析 激光雷达的优势: 1)在测距及分辨率上都有较高水,水平分辨率能够达到0.1°,以内垂直分辨率达2°以内。 2)方向性好,抗干扰能力强,隐蔽性好,不受无线电波干扰; 3)3D建模进行环境感知 - 通过激光扫描可以得到汽车周围的3D模型,运用相关算法能够较为容易的识别出周围的车辆和行人。 4)SlAM加强定位,通过激光雷达实时扫描得到的全局地图经过与高精度地图中特征物比对,实现车辆导航及加强车辆定位精度; 激光雷达的劣势: 1)技术门槛和成本较高; 2)受天气条件影响较大, 在云、雾、雪等恶劣环境中衰减严重,无法提供精确的环境图像; |
【本文地址】