| 线性代数本质系列(二)矩阵乘法与复合线性变换,行列式,三维空间线性变换 | 您所在的位置:网站首页 › 行列式怎么做乘法 › 线性代数本质系列(二)矩阵乘法与复合线性变换,行列式,三维空间线性变换 |
线性代数本质系列(二)矩阵乘法与复合线性变换,行列式,三维空间线性变换
|
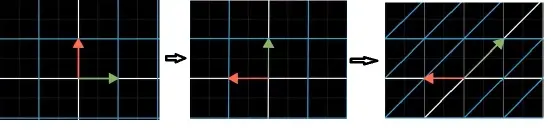
本系列文章将从下面不同角度解析线性代数的本质,本文是本系列第二篇 向量究竟是什么? 向量的线性组合,基与线性相关 矩阵与线性相关 矩阵乘法与复合线性变换 三维空间中的线性变换 行列式 逆矩阵,列空间,秩与零空间 克莱姆法则 非方阵 点积与对偶性 叉积 以线性变换眼光看叉积 基变换 特征向量与特征值 抽象向量空间 快速计算二阶矩阵特征值 张量,协变与逆变和秩 文章目录 矩阵乘法与复合线性变换三维空间中的线性变换行列式 矩阵乘法与复合线性变换我们已经知道矩阵是一种线性变换,现在对基向量连续施加两种线性变换,例如,先旋转,再剪切,其实,这在整体上可以看作是一种新的变换,这个新的变换被称为前两种独立变换的“复合变换”。 这个复合变换的矩阵可以通过追踪基向量的坐标得到,如上图所示,变换后的
i
⃗
\vec{i}
i
坐标
[
1
1
]
\begin{bmatrix} 1\\ 1 \end{bmatrix}
[11],变换后的
j
⃗
\vec{j}
j
坐标
[
−
1
0
]
\begin{bmatrix} -1\\ 0 \end{bmatrix}
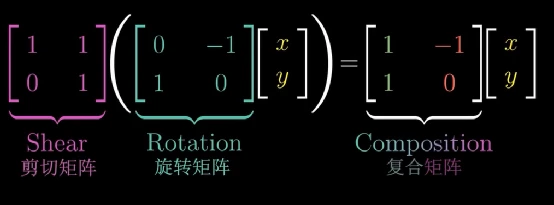
[−10],那么该复合变换矩阵就可以表示为:
[
1
−
1
1
0
]
\begin{bmatrix} 1 & -1\\ 1 & 0 \end{bmatrix}
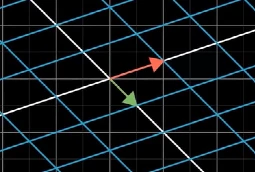
[11−10],当我们求一个向量经过复合变换后的坐标时,可以通过下图右边公式那样直接使用复合变换矩阵,而不需要像下图左边那样对向量连续施加两次单独的变换。 更一般地,对于矩阵乘法,我们就有了新的认识:他的几何意义是先施加一个变换,再施加另一个变换,施加顺序从右到左,顺序不同得到的结果也不同。
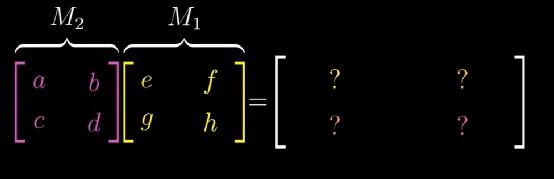
推广到更一般地数学含义: g ( f ( x ) ) g( f( x)) g(f(x)) 根据前面章节学习到的知识,要想求线性变换对向量的作用,首先要得到变换后的基向量的坐标,让我们来看一个例子,假设连续施加两个线性变换
M
1
M_{1}
M1和
M
2
M_{2}
M2。 要想跟踪
i
⃗
\vec{i}
i
的去向,先看
M
1
M_{1}
M1的第一列,这是经过
M
1
M_{1}
M1变换后
i
⃗
\vec{i}
i
首先到达的地方:
[
e
g
]
\begin{bmatrix} e\\ g \end{bmatrix}
[eg],然后新的
i
⃗
\vec{i}
i
要经过
M
2
M_{2}
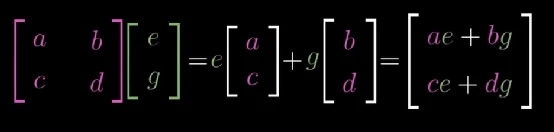
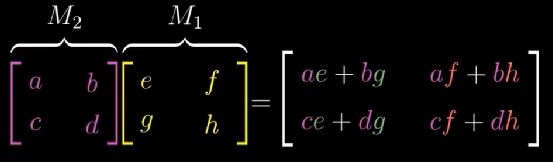
M2的变换后到达最终目的地: 该结果作为复合矩阵的第一列,
j
⃗
\vec{j}
j
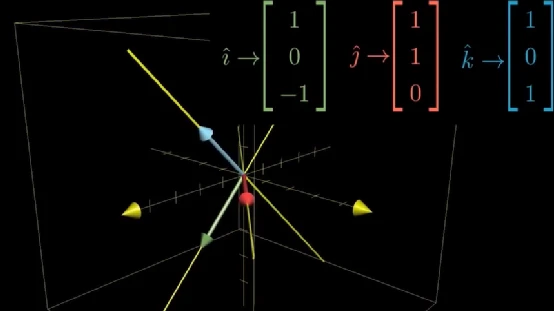
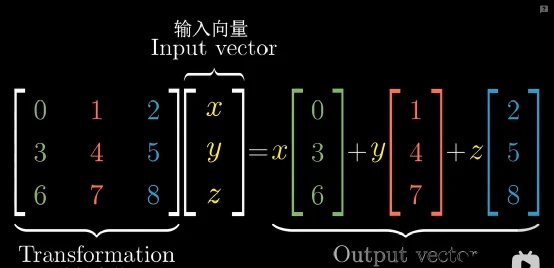
经过同样的变换过程到达最终目的地,结果为复合变换矩阵第二列,复合变换的最终结果为: 看,这不就是课堂上老师教的矩阵乘法计算规则嘛,只不过我们是从几何的角度推出来的。 大家可以从几何的角度来自行分析一下矩阵乘法的法则: 交换律: M 1 M 2 ≠ M 2 M 1 M_{1} M_{2} \neq M_{2} M_{1} M1M2=M2M1 结合率:(AB)C=A(BC) 三维空间中的线性变换前面一直在讨论二维情况,也就是将二维向量映射成二维向量,其实,只要掌握了二维线性变换的核心本质,就能轻松的扩展到更高维的空间中。 三维空间变换以三维向量为输入,以三维向量为输出,和二维向量一样,一个线性变换是在操纵三维空间中所有的点,变换后保持空间中网格线等距且原点不变。 与二维一样,三维线性变换也是由基向量的去向完全决定,只不过基向量由 i ⃗ \vec{i} i , j ⃗ \vec{j} j 变成了 i ⃗ \vec{i} i , j ⃗ \vec{j} j , k ⃗ \vec{k} k ,例如,我们得到变换后三个基向量的坐标,那么由三个新的基向量组成矩阵就是三维线性变换矩阵 [ 1 1 1 0 1 0 − 1 0 1 ] \begin{bmatrix} 1 & 1 & 1\\ 0 & 1 & 0\\ -1 & 0 & 1 \end{bmatrix} 10−1110101 。
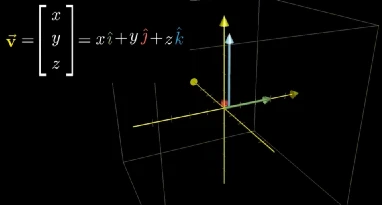
要想计算一个向量经过上面的三维变换后的新坐标,同样可以参照二维空间的计算方式,结果向量是基向量的线性组合。
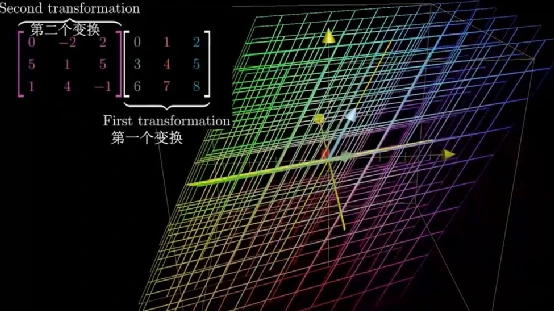
同理两个三维矩阵的相乘也可以合并成一个复合变换矩阵,三维变换在计算机图形学中有着广泛的应用。 三维矩阵的乘法同样遵循二维矩阵乘法的思路。 行列式前面我们从几何的角度对线性变换有了很直观的认识,其中有的线性变换对空间向外拉伸,有的则是将空间向内挤压。
有一种方法对于理解这些线性变换很有用,那就是准确测量向内挤压了多少,向外拉伸了多少,更具体地讲就是计算出一个区域增大或减少的比例。 让我们来看一个例子,假设一个线性变换矩阵 [ 3 0 0 2 ] \begin{bmatrix} 3 & 0\\ 0 & 2 \end{bmatrix} [3002],变换前基向量形成的四边形面积为1。
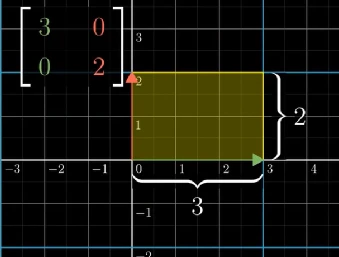
变换后,如下图,基向量形成一个2*3的矩形,面积为6
所以我们说这个变换将基向量形成的方格拉伸了6倍,根据线性变换的性质,如下图,所有可形成的区域都被拉伸了同样的大小。
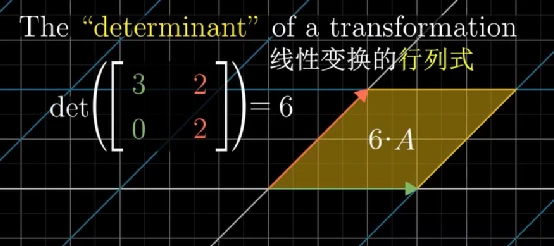
现在,我们要抛出一个重磅信息:这个面积的变化的比例值就是该线性变换矩阵的行列式,这就是行列式的几何意义。
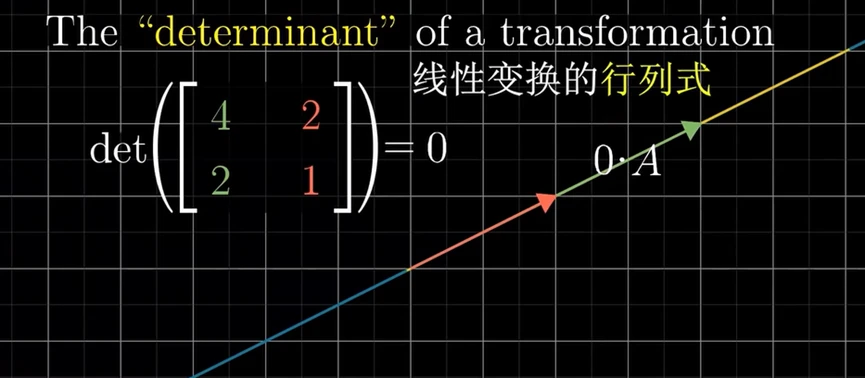
如果行列式值大于1,则代表该线性变换矩阵将一个区域进行拉伸,大于0且小于1的数代表缩小,负数代表反方向缩放。 注意,如果一个线性变换矩阵的行列式为0,则代表该变换将一个区域压缩成了一条线或者是一个点,从几何意义上讲,也就是说该变换将空间压缩到了更小的维度上,这在我们后面判断线性方程组是否有解提供了重要依据。
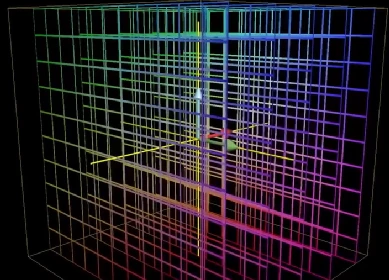
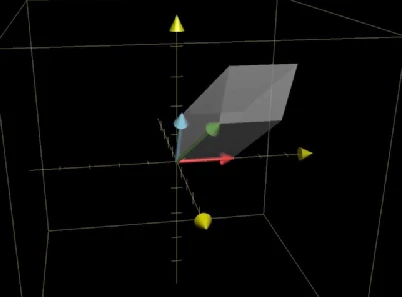
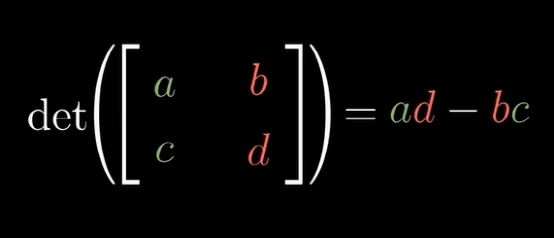
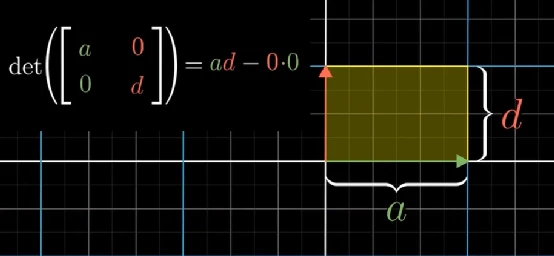
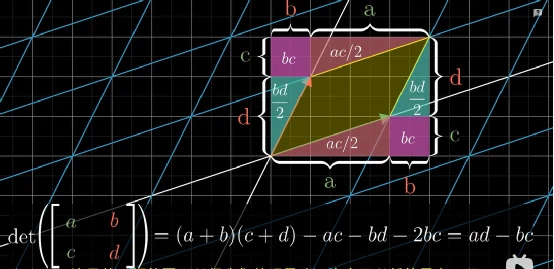
同理,三维线性变换的行列式代表的则是体积的变换比例,如下图,一个以初始基向量形成的111的立方体经过线性变换后该体积变成了如下图的大小。 三维变换矩阵的行列式为0,代表空间被压缩成了一个面,或者一个点,如果行列式是负数,说明空间定向已经发生改变,不能用右手定则描述基向量之间的关系。 前面说了行列式的几何意义,那如何求一个矩阵的行列式呢? 上图是一个行列式的计算公式,那它的几何意义是什么呢?如下图,假设给定一个特殊矩阵 [ a 0 0 d ] \begin{bmatrix} a & 0\\ 0 & d \end{bmatrix} [a00d], i ⃗ \vec{i} i 被缩放了a倍, j ⃗ \vec{j} j 被缩放了d倍,变换前后面积缩放了ad倍,这正符合行列式计算公式的结果。
前面我们给出了一个特殊的例子,但推广到更一般的矩阵,也是满足上面公式的。 |


 向内挤压
向内挤压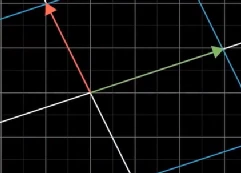 向外拉伸
向外拉伸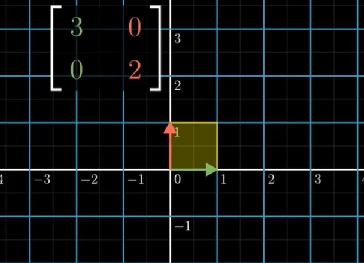
【本文地址】