| RT | 您所在的位置:网站首页 › 色彩库是什么意思 › RT |
RT
|
rt-thread是什么?
RT-Thread 是一个集实时操作系统(RTOS)内核、中间件组件和开发者社区于一体的技术平台,组件完整丰富、高度可伸缩、简易开发、超低功耗、高安全性的物联网操作系统。RT-Thread 拥有良好的软件生态,支持市面上所有主流的编译工具如 GCC、Keil、IAR 等,工具链完善、友好,支持各类标准接口,如 POSIX、CMSIS、C++应用环境、Javascript 执行环境等,方便开发者移植各类应用程序。商用支持所有主流MCU架构,如 ARM Cortex-M/R/A, MIPS, X86, Xtensa, C-Sky, RISC-V,几乎支持市场上所有主流的 MCU 和 Wi-Fi 芯片。 小飞哥结缘RT_Thread是去年参加全连接大赛,获得了个优秀奖,参赛项目是无线重力感应遥控小车,项目完整资料已经开源,小伙伴们可以自行获取,话不多说,开淦!
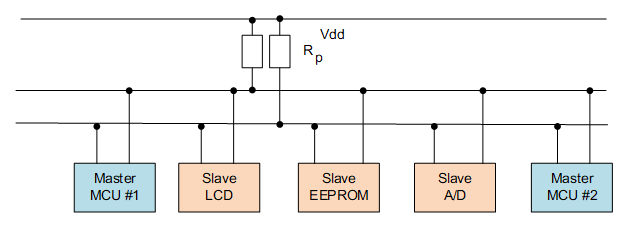
I2C(Inter Integrated Circuit)总线是 PHILIPS 公司开发的一种半双工、双向二线制同步串行总线。I2C 总线传输数据时只需两根信号线,一根是双向数据线 SDA(serial data),另一根是双向时钟线 SCL(serial clock)。SPI 总线有两根线分别用于主从设备之间接收数据和发送数据,而 I2C 总线只使用一根线进行数据收发。 I2C 和 SPI 一样以主从的方式工作,不同于 SPI 一主多从的结构,它允许同时有多个主设备存在,每个连接到总线上的器件都有唯一的地址,主设备启动数据传输并产生时钟信号,从设备被主设备寻址,同一时刻只允许有一个主设备。如下图所示:
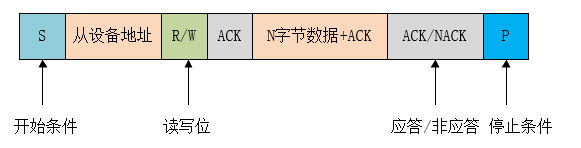
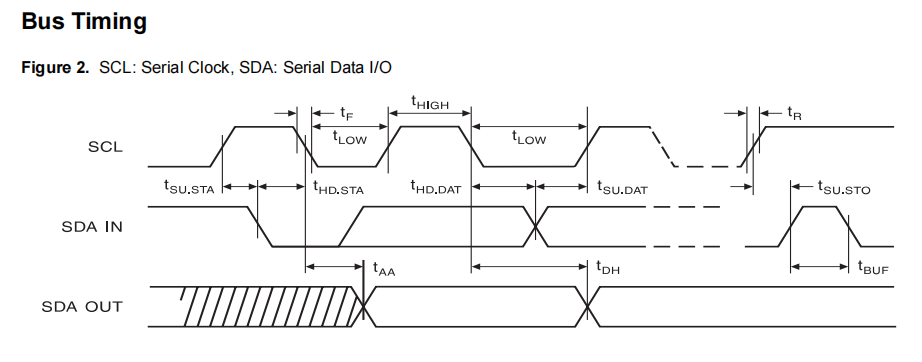
如下图所示为 I2C 总线主要的数据传输格式:
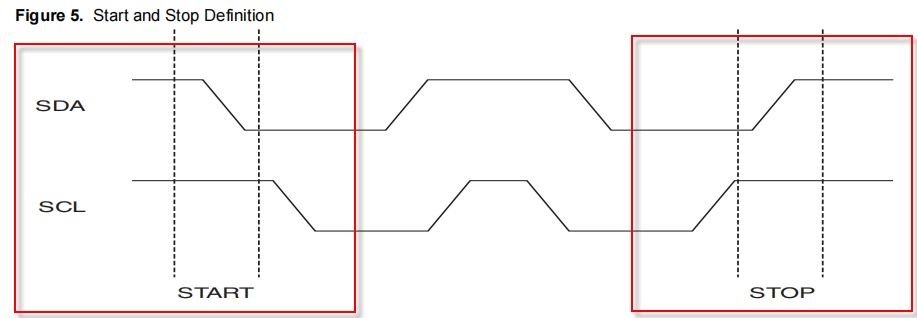
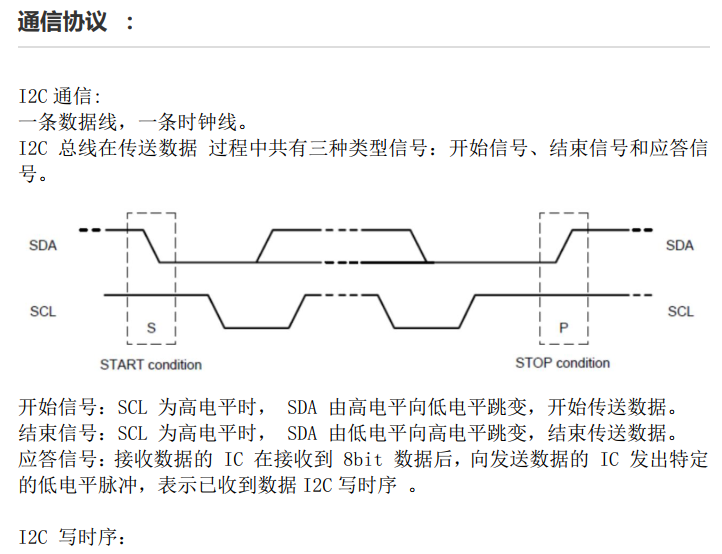
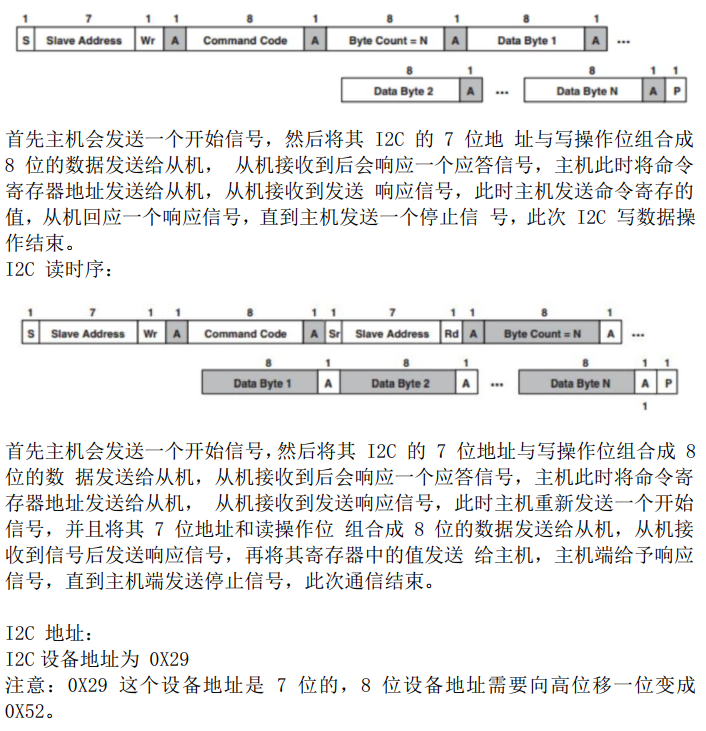
当总线空闲时,SDA 和 SCL 都处于高电平状态,当主机要和某个从机通讯时,会先发送一个开始条件,然后发送从机地址和读写控制位,接下来传输数据(主机发送或者接收数据),数据传输结束时主机会发送停止条件。传输的每个字节为8位,高位在前,低位在后。数据传输过程中的不同名词详解如下所示: 开始条件: SCL 为高电平时,主机将 SDA 拉低,表示数据传输即将开始,老规矩,还是波形说话,下面的波形就是对开始条件最好的描述:
从机地址: 主机发送的第一个字节为从机地址,高 7 位为地址,最低位为 R/W 读写控制位,1 表示读操作,0 表示写操作。一般从机地址有 7 位地址模式和 10 位地址模式两种,如果是 10 位地址模式,第一个字节的头 7 位 是 11110XX 的组合,其中最后两位(XX)是 10 位地址的两个最高位,第二个字节为 10 位从机地址的剩下8位,如下图所示:
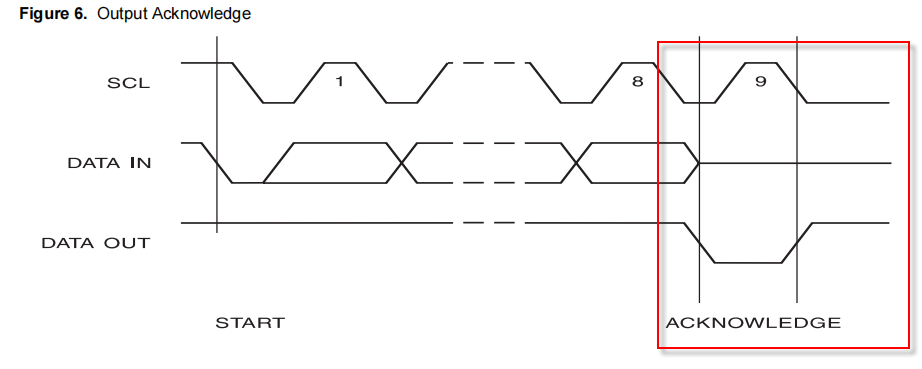
应答信号: 每传输完成一个字节的数据,接收方就需要回复一个 ACK(acknowledge)。写数据时由从机发送 ACK,读数据时由主机发送 ACK。当主机读到最后一个字节数据时,可发送 NACK(Not acknowledge)然后跟停止条件。
数据: 从机地址发送完后可能会发送一些指令,依从机而定,然后开始传输数据,由主机或者从机发送,每个数据为 8 位,数据的字节数没有限制。
重复开始条件: 在一次通信过程中,主机可能需要和不同的从机传输数据或者需要切换读写操作时,主机可以再发送一个开始条件。 停止条件: 在 SDA 为低电平时,主机将 SCL 拉高并保持高电平,然后在将 SDA 拉高,表示传输结束。
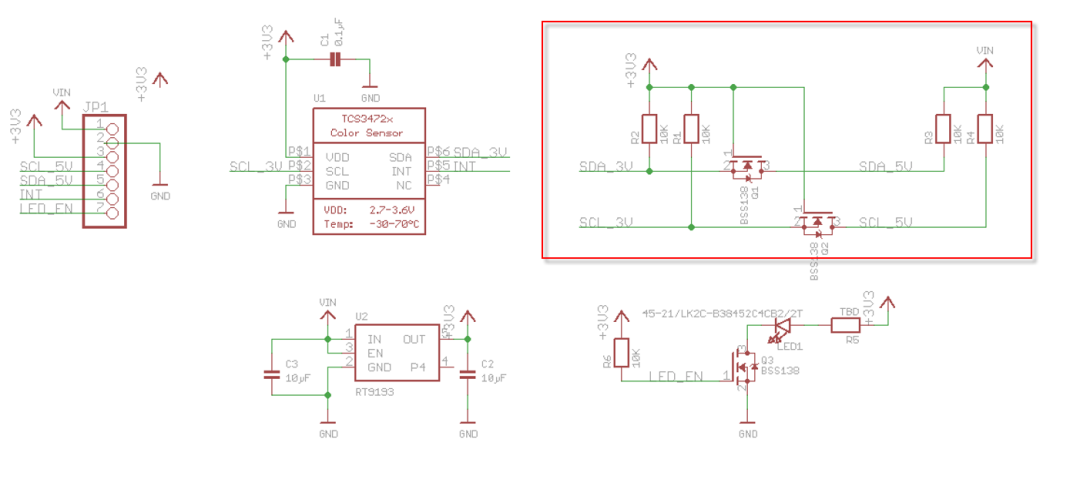
以上就是IIC协议的基本原理,看起来比较简单,实现起来也不难,MCU有硬件IIC的可以使用硬件IIC,没有的话,使用IO模拟即可。 RT-Thread IIC设备驱动使用习惯于MCU BSP驱动开发的玩家来说,初识RT_Thread的设备驱动可能有点蒙,原因在于RT_thread代码结构大多是面向对象的,类linux风格,学习过linux开发的小伙伴来看rt-thread一定会倍感亲切的... 接下来就以IIC设备驱动代码来看,如何使用rt-thread的IIC驱动 访问IIC设备一般情况下 MCU 的 I2C 器件都是作为主机和从机通讯,在 RT-Thread 中将 I2C 主机虚拟为 I2C总线设备,I2C 从机通过 I2C 设备接口和 I2C 总线通讯,相关接口如下所示: 函数描述rt_device_find()根据 I2C 总线设备名称查找设备获取设备句柄rt_i2c_transfer()传输数据 查找IIC设备在使用 I2C 总线设备前需要据 I2C 总线设备名称获取设备句柄,进而才可以操作 I2C 总线设备,查找设备函数如下所示: rt_device_t rt_device_find(const char* name); 参数描述name根据 I2C 总线设备名称查找设备获取设备句柄返回——设备句柄查找到对应设备将返回相应的设备句柄RT_NULL没有找到相应的设备对象如何使用呢,以下面要做的RGB颜色识别传感器为例,参数“name”实际上就是我们要用到的IIC设备名称 #define RGBSensor_I2C_BUS_NAME "i2c3" /* 传感器连接的I2C总线设备名称 */ static struct rt_i2c_bus_device *i2c_bus = RT_NULL; /* I2C总线设备句柄 */ static void rgbSensor_init(const char *name) { /* 查找I2C总线设备,获取I2C总线设备句柄 */ i2c_bus = (struct rt_i2c_bus_device *)rt_device_find(name); if (i2c_bus == RT_NULL) { rt_kprintf("can't find %s device failed!\n", name); } else { rt_kprintf("find %s device success!\n", name); rt_pin_mode(sensor_ledpin, PIN_MODE_OUTPUT); begin(); } } 数据传输获取到 I2C 总线设备句柄就可以使用 rt_i2c_transfer() 进行数据传输。函数原型如下所示: rt_size_t rt_i2c_transfer(struct rt_i2c_bus_device *bus, struct rt_i2c_msg msgs[], rt_uint32_t num); 参数描述busI2C 总线设备句柄msgs[]待传输的消息数组指针num消息数组的元素个数返回--消息数组的元素个数成功错误码失败和 SPI 总线的自定义传输接口一样,I2C 总线的自定义传输接口传输的数据也是以一个消息为单位。参数 msgs[] 指向待传输的消息数组,用户可以自定义每条消息的内容,实现 I2C 总线所支持的 2 种不同的数据传输模式。如果主设备需要发送重复开始条件,则需要发送 2 个消息。 关于IIC通讯所有到的地址、读写控制、数据长度、数据等参数封装在一个结构体中: struct rt_i2c_msg { rt_uint16_t addr; /* 从机地址 */ rt_uint16_t flags; /* 读、写标志等 */ rt_uint16_t len; /* 读写数据字节数 */ rt_uint8_t *buf; /* 读写数据缓冲区指针 */ }注意: 此函数会调用 rt_mutex_take(), 不能在中断服务程序里面调用,会导致 assertion 报错。 关于IIC的主要函数原型如上面,底层的东西就不需要关心了,有没有一种很方便(不知所措)的感觉,回想起以前自己编写的,起始信号、停止信号、超时判断,一点一点都要自己动手,简直了...但是初学者学学编写逻辑也挺好的,慢慢转向面向对象也挺好... RGB颜色识别传感器实战上面介绍了rtt IIC设备驱动的基本使用,小伙伴们是不是还有点迷糊,下面来实战,如何使用 颜色传感器简介小飞哥在某宝买的,¥6,IIC通讯接口,板子虽小,还挺精致,原理图还是不错的,可以参考参考
红框中的双向电平转换电路是一个不错的低成本转换电路,完全可以借鉴应用到自己的产品中
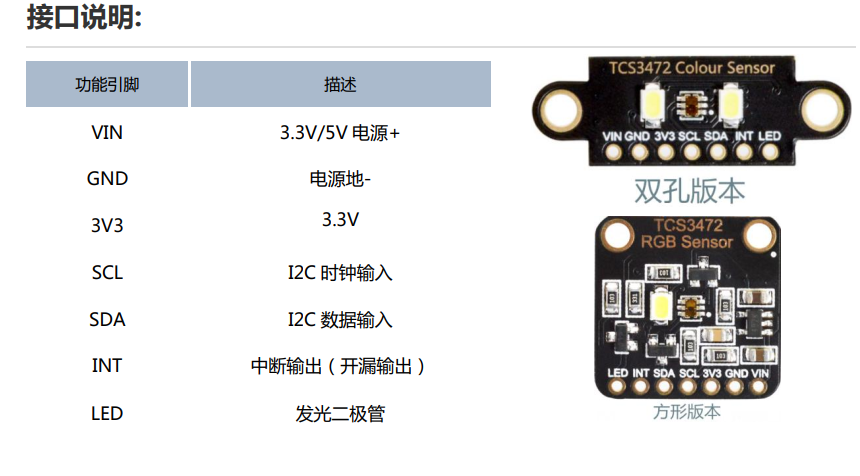
接口说明
通讯协议
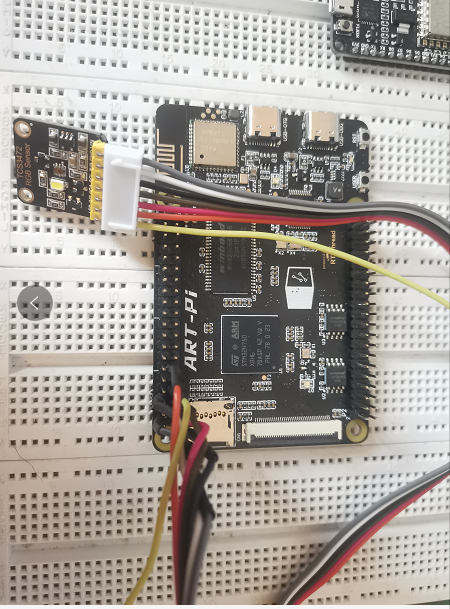
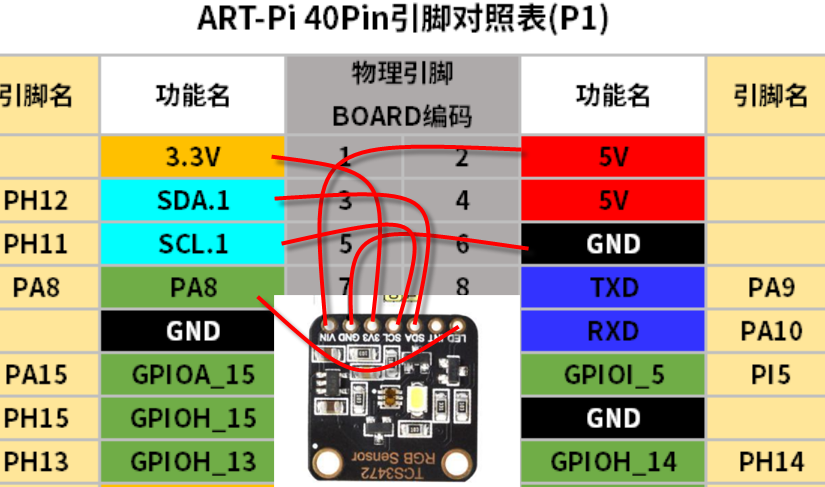
更多的传感器信息,请查看传感器datasheet 代码编写硬件连接
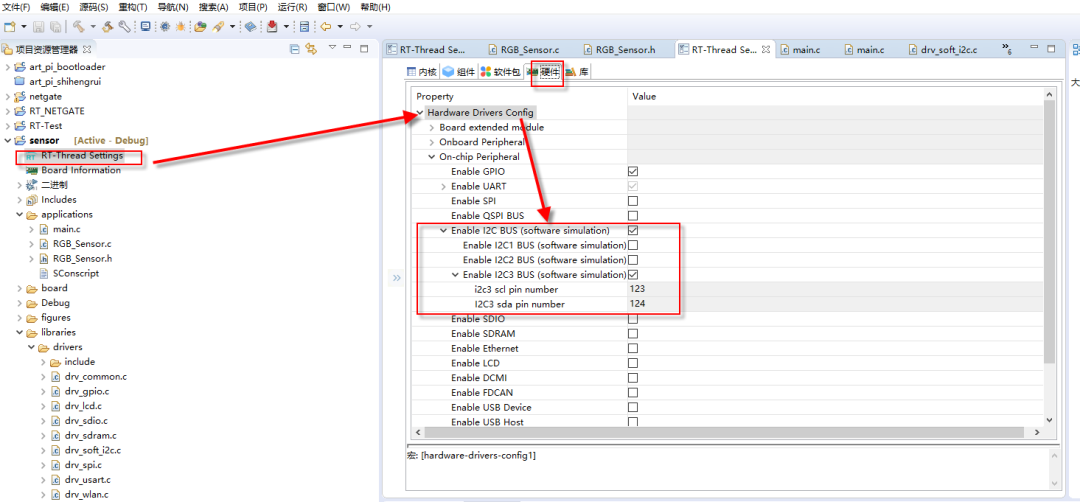
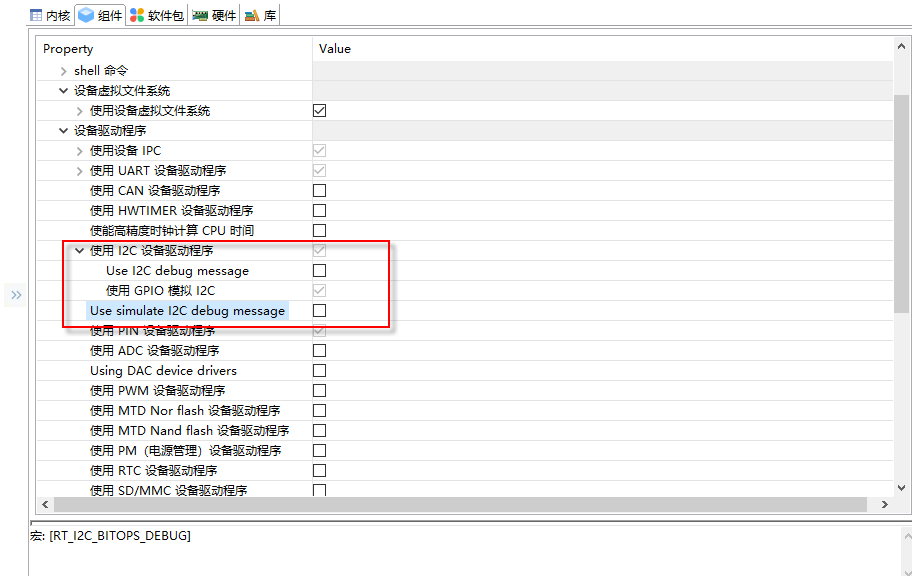
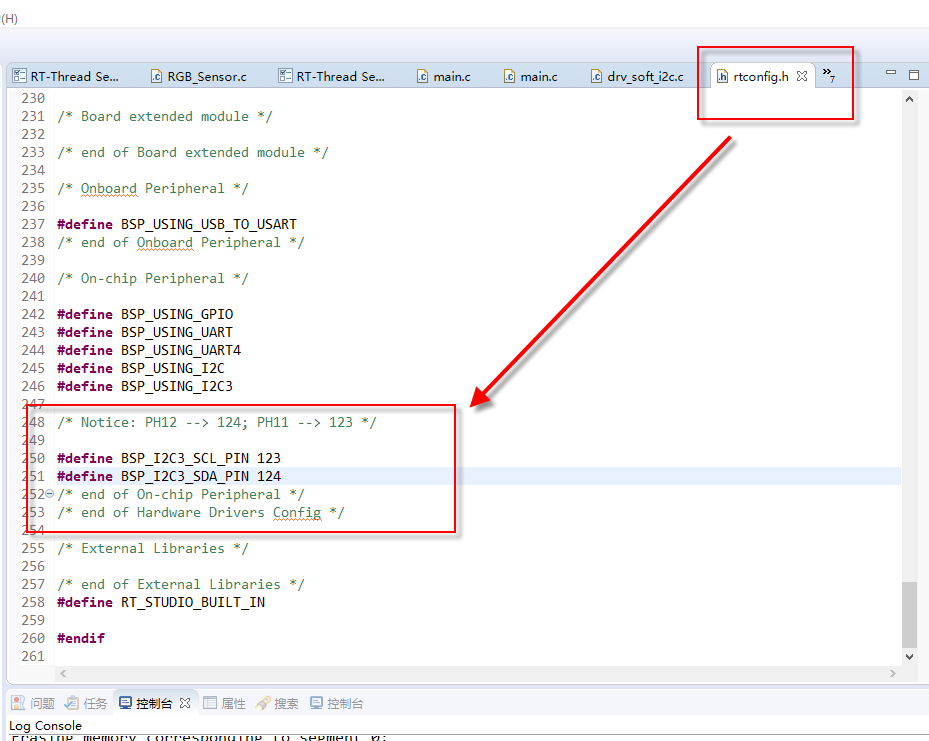
rt-Thread studio配置 新建工程就不说了,小飞哥前面的文章有讲到过,采用模拟IIC,来看看如何配置组件,我选择的是IIC3,随自己心意就好,配置比较简单,配置完保存即可
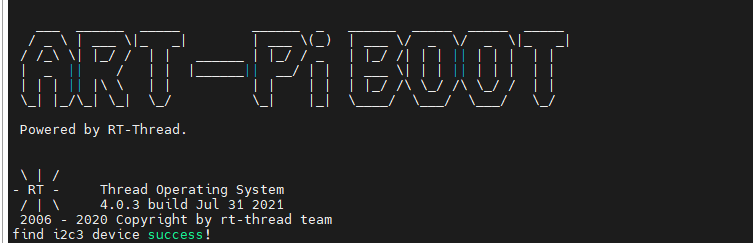
经过上面章节的介绍,对rtt iic设备的使用有了一些简单的了解,下面来具体使用,先来看初始化过程 1、查找IIC设备是否注册 static void rgbSensor_init(const char *name) { /* 查找I2C总线设备,获取I2C总线设备句柄 */ i2c_bus = (struct rt_i2c_bus_device *)rt_device_find(name); if (i2c_bus == RT_NULL) { rt_kprintf("can't find %s device failed!\n", name); } else { rt_kprintf("find %s device success!\n", name); rt_pin_mode(sensor_ledpin, PIN_MODE_OUTPUT); begin(); } }编译完,不出意外的话,应该会出现以下,恭喜你,完成了第一步...
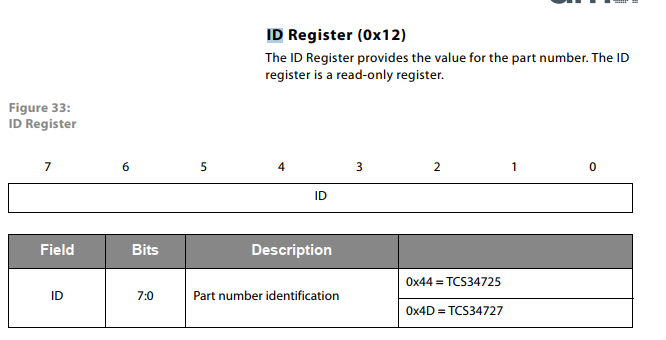
接下来是对传感器的读写操作,先来封装两个读写寄存器函数 /* 写传感器寄存器 */ static rt_err_t write_reg(struct rt_i2c_bus_device *bus, rt_uint8_t reg, rt_uint32_t *data) { rt_uint8_t buf[3]; struct rt_i2c_msg msgs; rt_uint32_t buf_size = 1; buf[0] = TCS34725_COMMAND_BIT | reg; //cmd if (data != RT_NULL) { buf[1] = data[0]; buf[2] = data[1]; buf_size = 3; } msgs.addr = TCS34725_ADDRESS; msgs.flags = RT_I2C_WR; msgs.buf = buf; msgs.len = buf_size; /* 调用I2C设备接口传输数据 */ if (rt_i2c_transfer(bus, &msgs, 1) == 1) { return RT_EOK; } else { return -RT_ERROR; } } /* 读传感器寄存器数据 */ static rt_err_t read_regs(struct rt_i2c_bus_device *bus,rt_uint8_t reg,rt_uint8_t len, rt_uint8_t *buf) { struct rt_i2c_msg msgs; write_reg(i2c_bus,reg, RT_NULL); msgs.addr = TCS34725_ADDRESS; msgs.flags = RT_I2C_RD; msgs.buf = buf; msgs.len = len; /* 调用I2C设备接口传输数据 */ if (rt_i2c_transfer(bus, &msgs, 1) == 1) { return RT_EOK; } else { return -RT_ERROR; } }接下来先来确认模块是不是连接成功,进行读ID操作,这也是确认MCU和模组连接的常用方法先来读ID试试,需要注意下,型号不同,器件ID有区别,小飞哥被坑了好一会才想起来查手册...所以大家一定要先看手册,看一些关键信息,避免因手册没看浪费时间
顺利的话,是没问题的,设备连接OK的
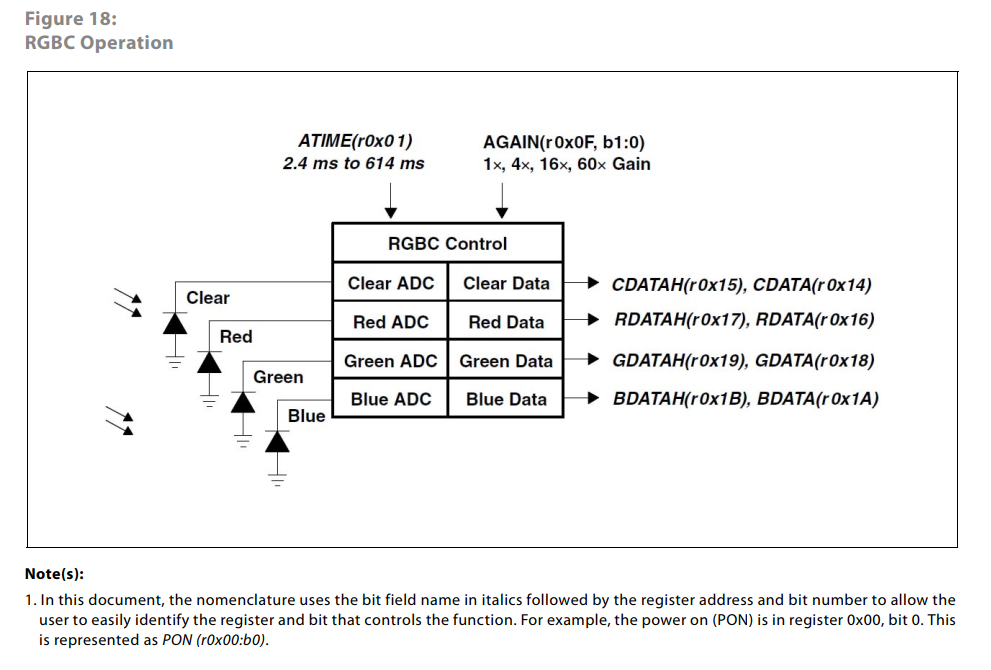
获取原始数据,根据下图中的RGBC寄存器地址读取数据即可
|



【本文地址】