| 自动控制理论(10) | 您所在的位置:网站首页 › 绘制根轨迹的基本条件 › 自动控制理论(10) |
自动控制理论(10)
|
系列文章目录
文章目录
系列文章目录一、根轨迹基本概念二、绘制根轨迹的基本规则(
18
0
0
180^0
1800根轨迹)1.根轨迹的分支数和对称性2.根轨迹的起点和终点3.实轴上的根轨迹4.根轨迹的渐近线5.根轨迹的分离点与汇合点6.根轨迹的出射角与入射角7.根轨迹与虚轴的交点8.闭环极点的和与积
三、广义根轨迹1.参量根轨迹2.零度根轨迹
一、根轨迹基本概念
1、根轨迹是开环系统某一参数由零变化到无穷大时,闭环系统特征方程式的根在s平面上变化的根轨迹 2、根轨迹方程
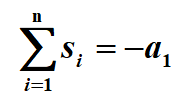
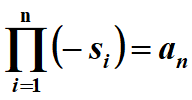
相角条件是决定闭环系统根轨迹的充分必要条件,绘制根轨迹只要满足相角条件就可以,而幅值条件主要用来确定根轨迹上各点对应的根轨迹增益K1值。 二、绘制根轨迹的基本规则( 18 0 0 180^0 1800根轨迹) 1.根轨迹的分支数和对称性根轨迹对称于实轴,分支数等于n 2.根轨迹的起点和终点起始于开环极点,终止于开环零点。 其中 m条终止于开环有限零点, n-m 条终止于无穷远处的零点。 3.实轴上的根轨迹在实轴上根轨迹区段的右侧,开环实零点和实极点数目之和为奇数。 4.根轨迹的渐近线(1) n-m条渐近线与实轴的夹角为: 分离点(汇合点)是根轨迹增益的极值点,分离点满足方程 出射角: 方法 1、用劳斯判据求解; 2、将 s=jw 带入特征方程求解 8.闭环极点的和与积
以非K1为参变量的根轨迹称为参量根轨迹。 引入等效单位反馈系统和等效传递函数的概念,则前述规则均适用。 a为参变量: 1 + a P ( s ) Q ( s ) = 0 1+\frac{aP(s)}{Q(s)}=0 1+Q(s)aP(s)=0 等效开环传递函数**(黄金法则)**: G ∗ ( s ) H ∗ ( s ) = a P ( s ) Q ( s ) G^*(s)H^*(s)=\frac{aP(s)}{Q(s)} G∗(s)H∗(s)=Q(s)aP(s) 2.零度根轨迹满足方程
1
−
G
(
s
)
H
(
s
)
=
0
1-G(s)H(s)=0
1−G(s)H(s)=0的根轨迹 绘制规则有部分修改: 3.实轴上的根轨迹 在实轴上根轨迹区段的右侧,开环实零点和实极点数目之和为偶数。 4.根轨迹的渐近线 |
 绘制根轨迹的两个基本条件: 幅值条件:
绘制根轨迹的两个基本条件: 幅值条件: 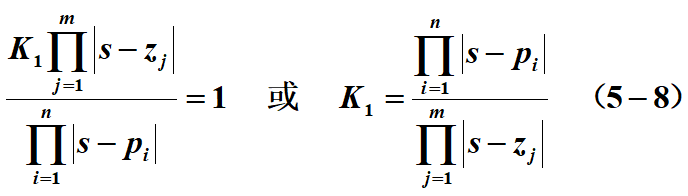 相角条件: 负反馈:
相角条件: 负反馈:  正反馈:
正反馈: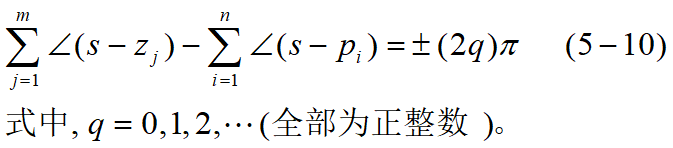 负反馈的根轨迹,称为
18
0
0
180^0
1800根轨迹 正反馈的根轨迹,称为
0
0
0^0
00根轨迹
负反馈的根轨迹,称为
18
0
0
180^0
1800根轨迹 正反馈的根轨迹,称为
0
0
0^0
00根轨迹 (2) 渐近线与实轴的交点为:
(2) 渐近线与实轴的交点为: 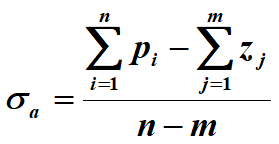

 入射角:
入射角: 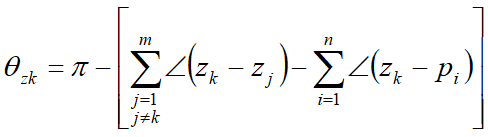
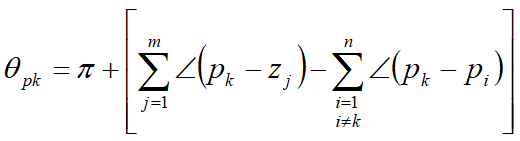
 6.根轨迹的出射角和入射角 出射角:
6.根轨迹的出射角和入射角 出射角: 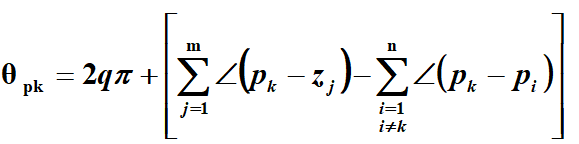 入射角:
入射角: 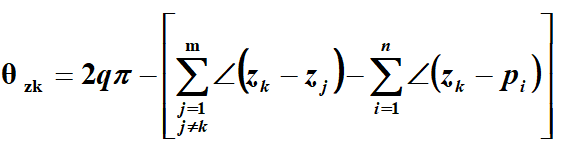
【本文地址】