| 《计算机控制系统设计 | 您所在的位置:网站首页 › 绘制根轨迹的基本原则 › 《计算机控制系统设计 |
《计算机控制系统设计
|
目录一、根轨迹法1. 核心思想2. 指标转换3. 绘制设计样板图4. 绘制根轨迹的原则(1)预备知识(2)根轨迹的幅值条件和相角条件(3)根轨迹绘制原则5. 设计数字控制器D(z)(i) 明确D(z)通式(ii) 离散系统稳态误差(iii) 设计D(z)二、频率法三、解析法A.最小拍设计1.基本思想2.设计原则(1)D(z)的物理可实现性(2)系统稳定性(3)最少拍系统(4)对特定输入无稳态误差(5)无纹波3.例题B.大林算法(纯滞后对象的控制设计)
一、根轨迹法
1. 核心思想
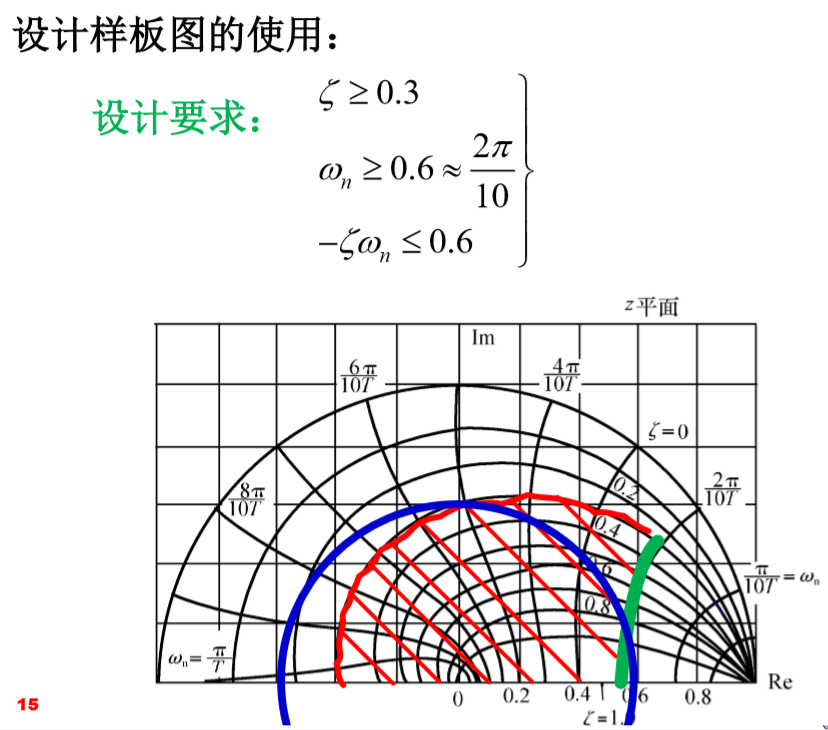
(1) 将时域动态指标 超调量σ、上升时间tr 及 峰值时间ts转换为z域指标阻尼比ξ、自然频率wn 及 -ξwn ; (2)利用z域指标结合 设计样板图 绘制出特殊区域; (3)设计D(z) ,使得 完整系统 的根轨迹经过该特殊区域即可。( 根轨迹方程(1+D(z)G(z) , 注意G(z)为广义被控对象,即 G(z) = ZOH*Go(z) ) 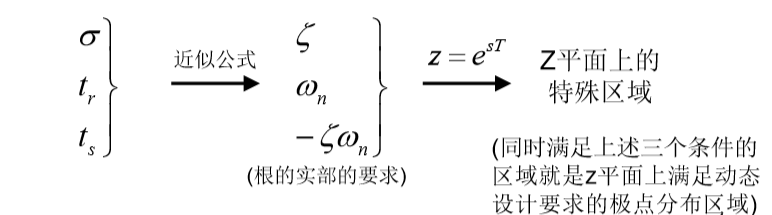
 2. 指标转换
2. 指标转换
由自动控制原理I知识可以知道,某些高阶系统,可以近似为二阶系统: 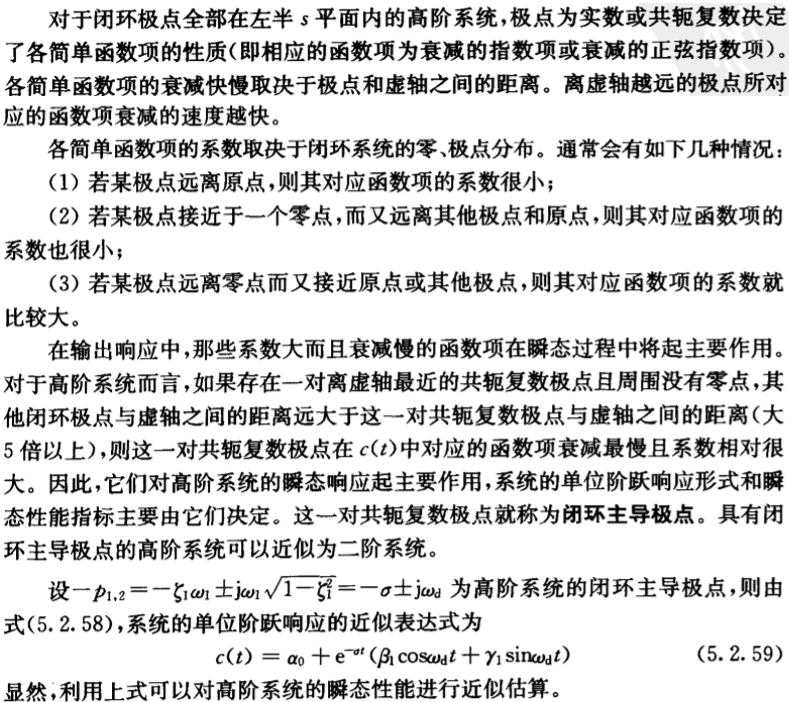 对于典型二阶系统:
对于典型二阶系统:
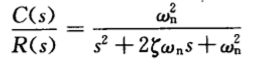
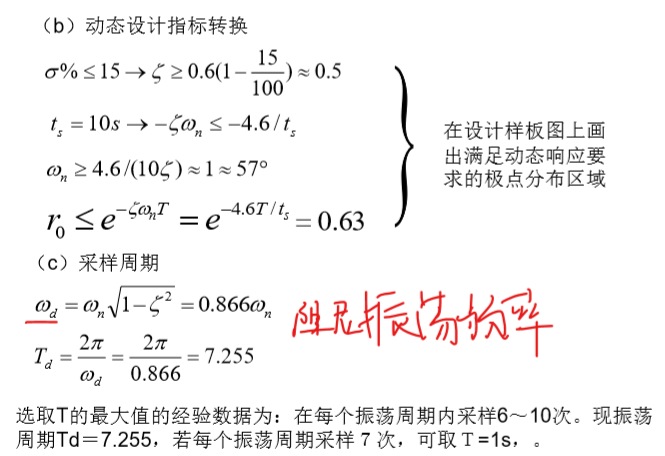
经过一系列推导可以得到指标转换关系: 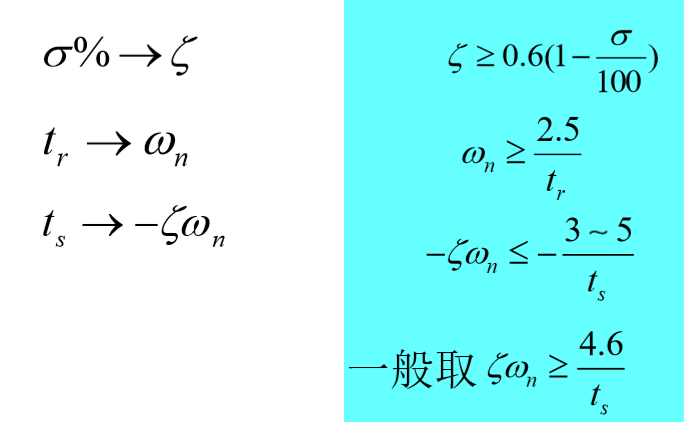 3. 绘制设计样板图
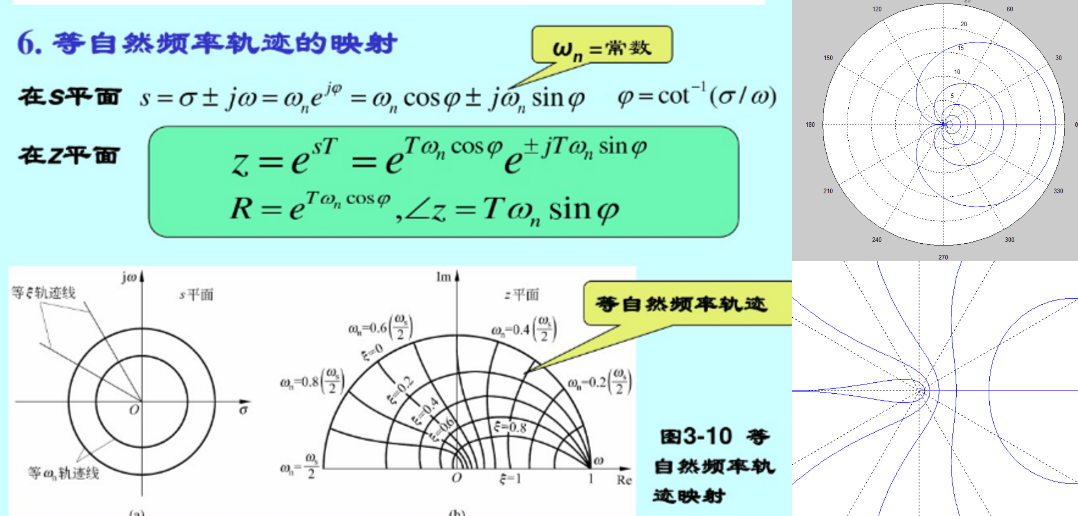
3. 绘制设计样板图
设计样板图 绘制在 z平面,包含 等阻尼比ξ螺旋线、等自然频率wn线 及以 r = e-ξwn为半径的圆周曲线: 
 4. 绘制根轨迹的原则
(1)预备知识
4. 绘制根轨迹的原则
(1)预备知识
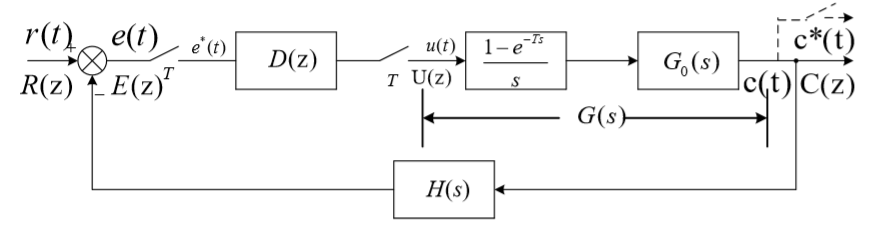
对于如下典型系统方框图: 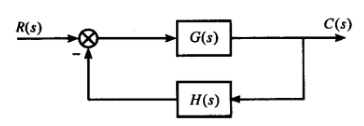
其闭环传递函数为: 
其开环传递函数的零极点形式如下: 
上式中 Kg 称为 根轨迹增益,通常所述的 开环增益K 为: 
特别注意,上式不计零值极点,零点个数为0时分子记为1。 (2)根轨迹的幅值条件和相角条件幅值条件: 
幅角条件:  (3)根轨迹绘制原则
(3)根轨迹绘制原则
(i) 起点和终点 起于极点,终于零点。 (ii) 分支数 等于开环极点数。 (iii) 对称性 关于复平面实轴对称。 (iv) 渐近线 渐近线方程: 
渐近线与实轴交点: 
渐近线与实轴夹角: 
(v) 实轴上的根轨迹 当根轨迹增益Kg为正数时,实轴上的点若在根轨迹上,则其右方实轴上的开环零点数和极点数的和必为奇数。 (vi) 实轴上的分离点和汇合点 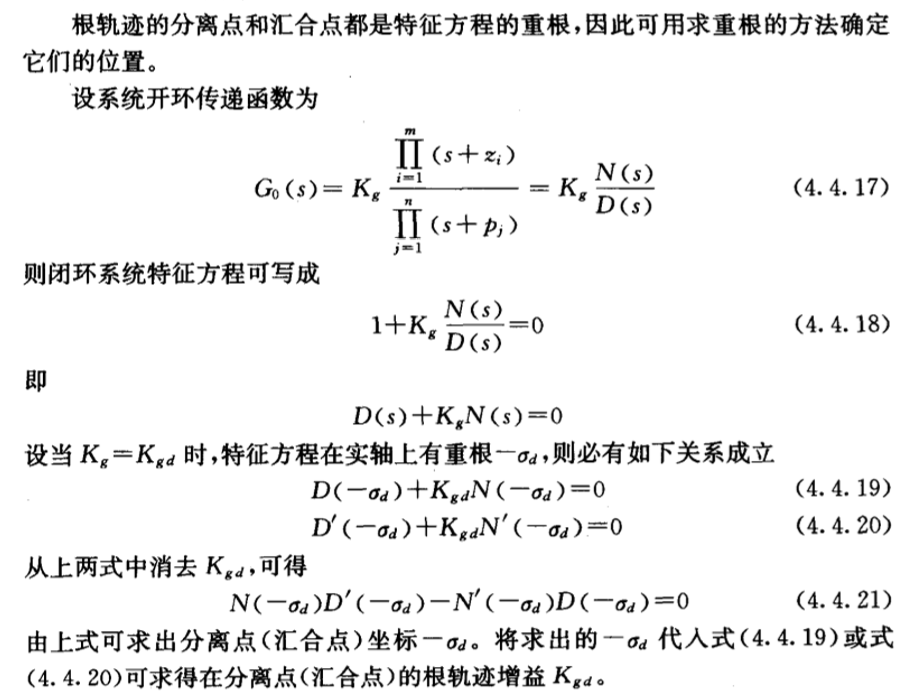
(vii) 复平面上的出射角和入射角 根轨迹趋于开环零点-p1的出射角: 
根轨迹趋于开环零点-z1的入射角:  5. 设计数字控制器D(z)
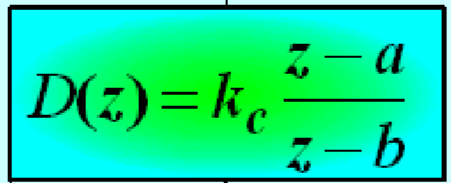
(i) 明确D(z)通式
5. 设计数字控制器D(z)
(i) 明确D(z)通式
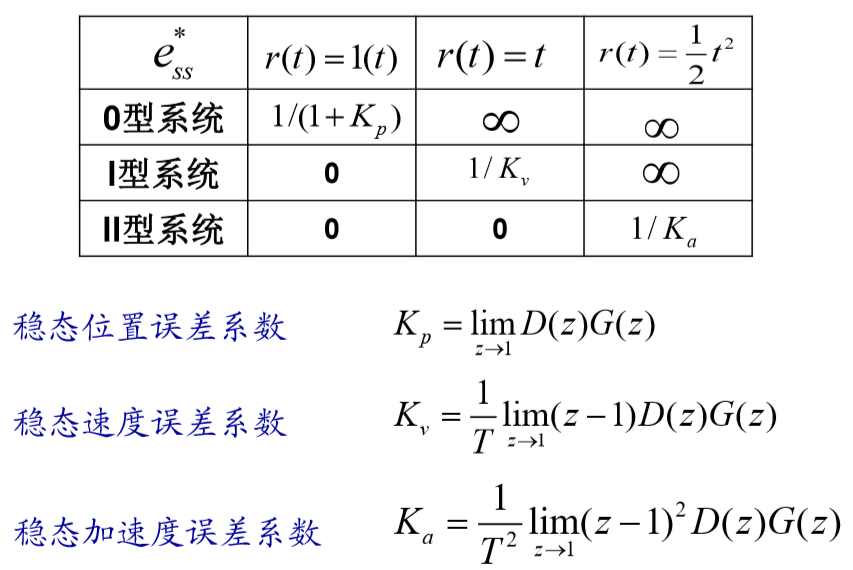
 (ii) 离散系统稳态误差
(ii) 离散系统稳态误差
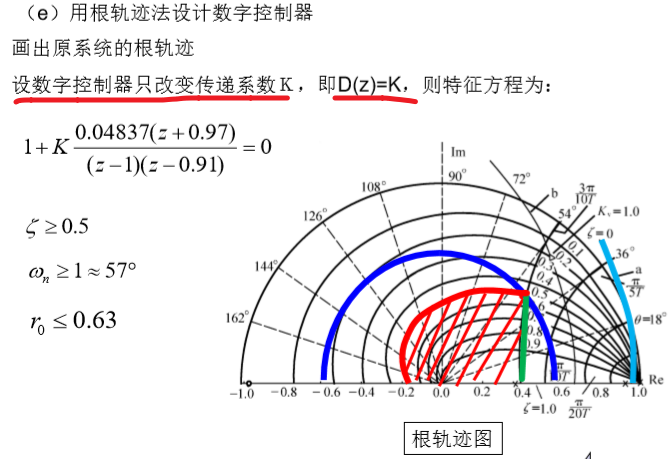
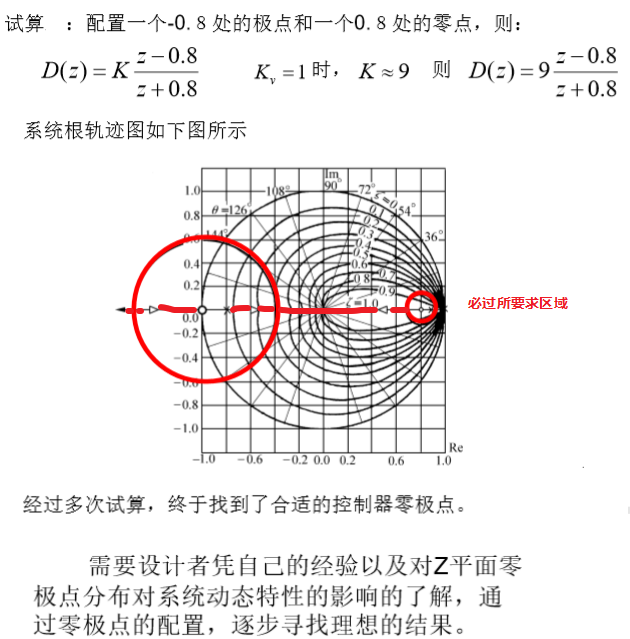
 (iii) 设计D(z)
(iii) 设计D(z)
以例题进行叙述较为直观: 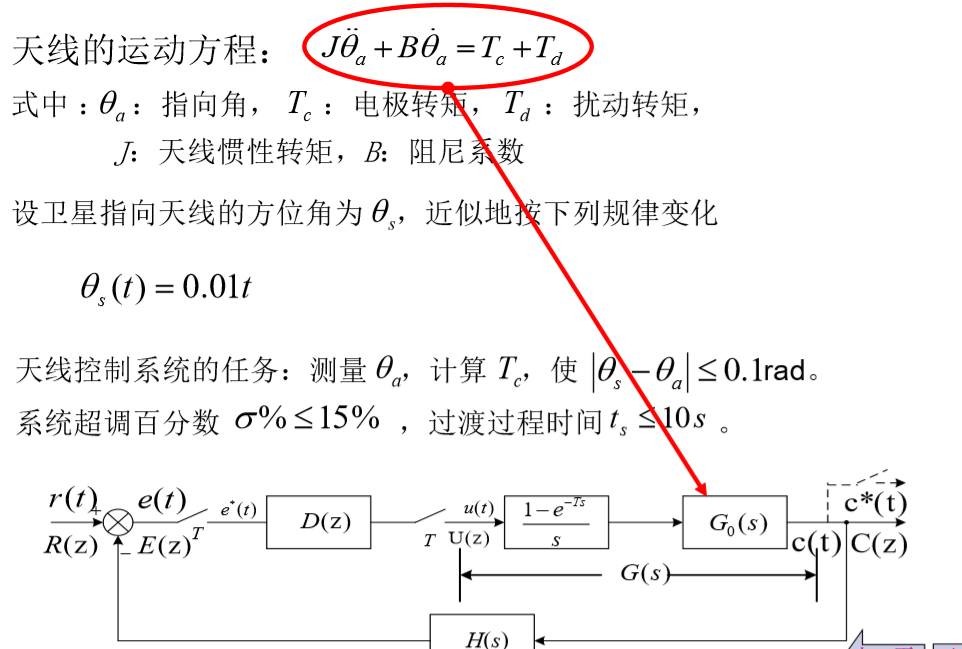
以下为解题过程: 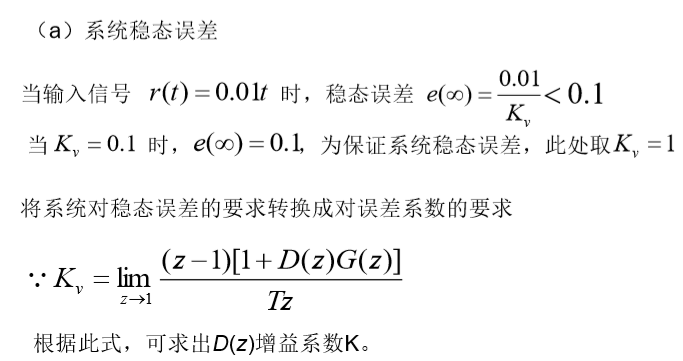
 二、频率法
二、频率法
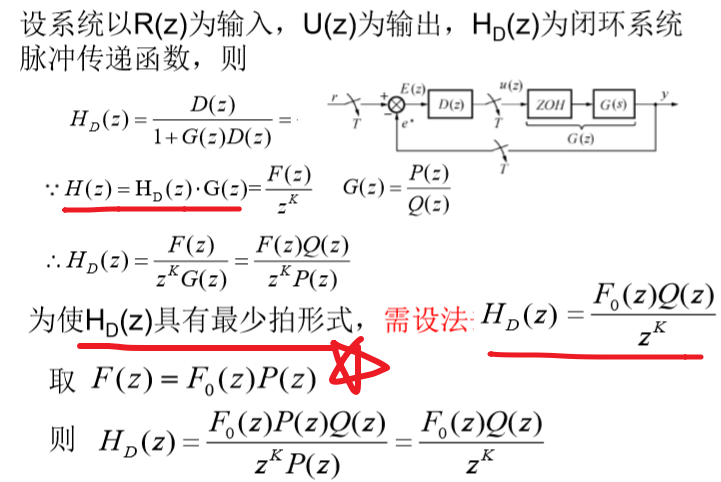
本课程不讲解,故不作讨论。 三、解析法 A.最小拍设计 1.基本思想核心思想:将期望的闭环系统行为预先确定下来,用公式表示出来, 再通过代数解法,求出控制器的传递函数。通常理想的系统为无纹波、无稳态误差的最少拍系统。 对于如下系统: 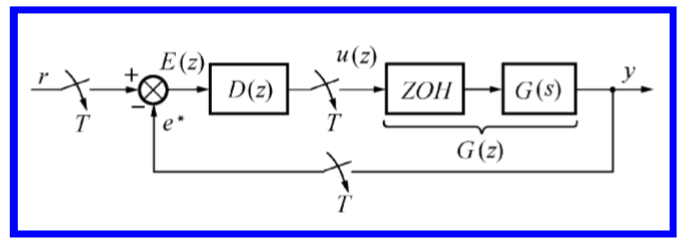
其闭环特征传递函数H(z): 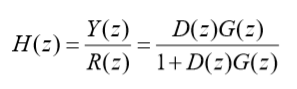
得数字控制器传递函数D(z): 
从上式可以看出 D(z)的解析法设计主要需要考虑H(z)和1-H(z)的形式 。 2.设计原则 (1)D(z)的物理可实现性所谓物理可实现性,即要求系统为因果系统。体现在: 要求 H(z)的分母阶数-分子阶数>=G(z)的分母阶数-分子阶数 (2)系统稳定性 H(z)的零点中应包含G(z)中不稳定的零点 1-H(z)的零点中应包含G(z)中不稳定的极点 (3)最少拍系统H(z)应为z-1的多项式,即  (4)对特定输入无稳态误差
(4)对特定输入无稳态误差
1-H(z)应具有如下形式: 
其中K为输入信号的型别: 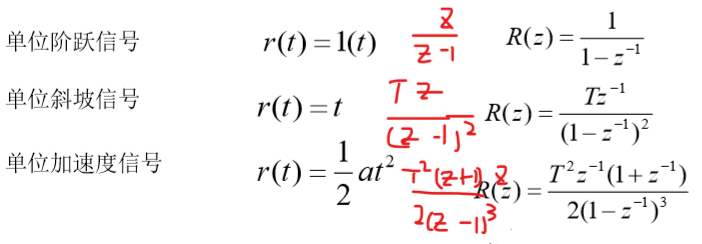
 (5)无纹波
H(z)应包含G(z)的分子多项式
(5)无纹波
H(z)应包含G(z)的分子多项式
 3.例题
3.例题
如下所示: 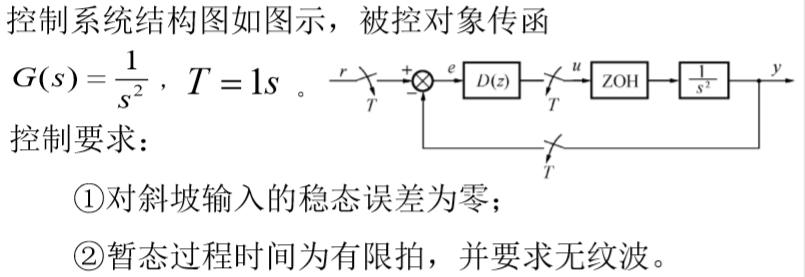
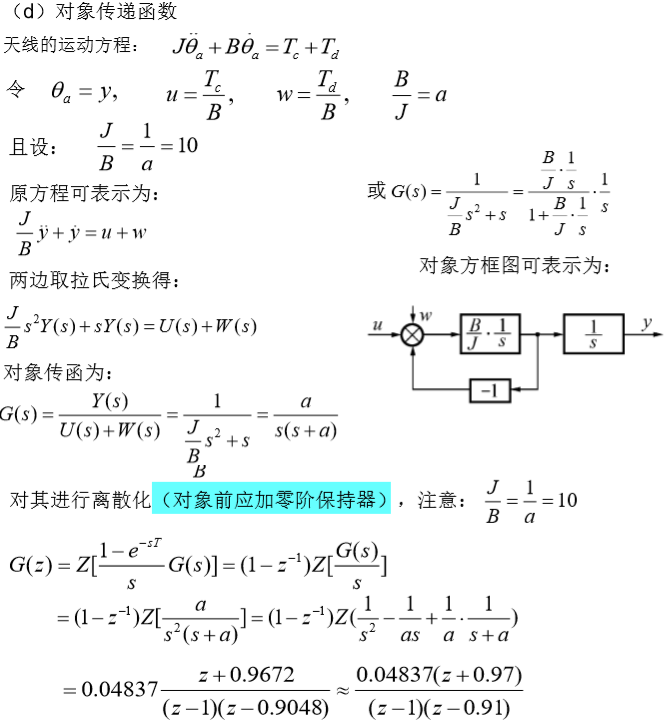
(0) 离散化广义被控对象G(s) 
(i) D(z)的物理可实现性 由式可知,D(z)只要求分母阶次>=分子阶次即可。 (ii) 系统稳定性 H(z)的零点中应包含G(z)中不稳定的零点: 
1-H(z)的零点中应包含G(z)中不稳定的极点: 
(iii) 最少拍系统 H(z)应为z-1的多项式,即
(iv)对特定信号稳态误差为零 由于输入信号为斜坡信号,因此有:
(v)无纹波 H(z)应包含G(z)的分子多项式。故有: 
且余项(F0(z) / zk)也为最少拍形式,故取K = 1,得: 
(vi)综合求解 由(ii)(iii)(v),得 H(z) :
观察可知 F2(z) = z-1F0(z) / zk,得: 

由上式,得 1-H(z): 
由(ii)(iv),得 1-H(z) 形式:
为使使H(z)和1-H(z) 中 z-1的最高阶次相等,取: 
故: 
对比两蓝色区域所示部分,应有: 
比较系数,解方程组: 
带入H(z)和1-H(z): 
得D(z): 
进而得计算机控制式:  B.大林算法(纯滞后对象的控制设计)
B.大林算法(纯滞后对象的控制设计)

|
【本文地址】