| 自控原理 | 您所在的位置:网站首页 › 绘制根轨迹的充要条件 › 自控原理 |
自控原理
|
目录 一、系统动态性能指标计算公式 二、利用根轨迹分析系统动态性能 (一)、绘制系统根轨迹 1.根轨迹方程 2.根轨迹绘制步骤 3.根轨迹绘制法则 4.MATLAB绘制根轨迹 (二)、根据闭环根轨迹分析系统性能 一、系统动态性能指标计算公式 动态性能指标计算公式 系统类型系统闭环传递函数单位阶跃响应性能指标计算公式一阶系统T:系统时间常数
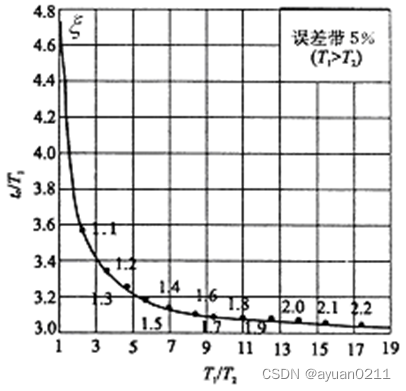
注:ts均表示进入5%误差带。
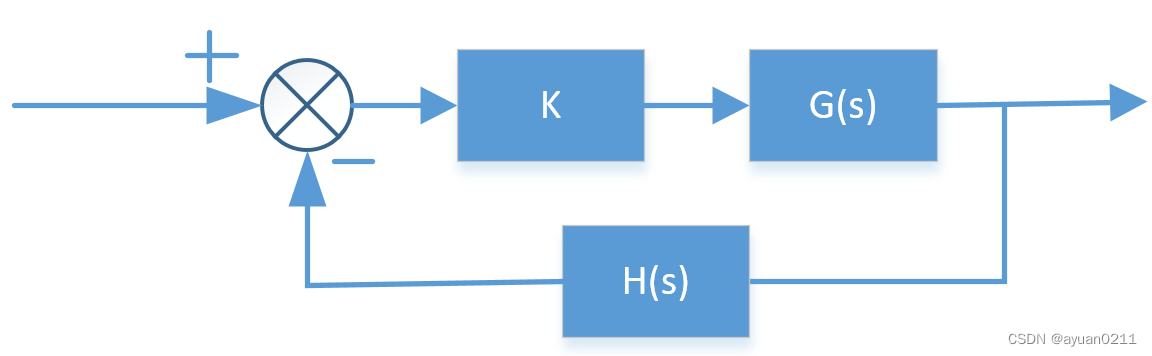
图1:过阻尼系统,T1/T2与ts/T1的关系曲线 二、利用根轨迹分析系统动态性能针对此控制结构:
1+KG(s)H(s)=0-->KG(s)H(s)=-1 模值条件:|KG(s)H(s)|=1(闭环极点到所有开环零点距离之积/闭环极点到所有开环极点距离之积) 相角条件: (n-m-1/m-n-1)取决于系统分母阶次和分子阶次那个高。 2.根轨迹绘制步骤(1)开环传递函数零极点确定: a.求解根轨迹增益K从0 b.求解除K以外的参数从0 举个栗子1: 单位反馈系统的传递函数为 写出标准特征方程, 将问题从 (2)根据开环零极点,根轨迹绘制法则,绘制闭环根轨迹。 3.根轨迹绘制法则1.根轨迹的起点和终点:根轨迹起始于开环极点,终止于开环零点;如果开环极点个数n>开环零点个数m,则有n-m条根轨迹终止于无穷远处。 2.根轨迹的分支数,对称性和连续性:根轨迹的分支数=系统阶次(一般分子阶数比分母阶数高,即一般情况下等于极点个数),根轨迹连续且对称于实轴。 3.实轴上的根轨迹:从实轴最右端的开环零、极点算起,奇数开环零、极点到偶数开环零、极点之间的区域必是根轨迹。 4.闭环根之和: 定理:若系统有2个开环极点,1个开环零点,且复平面存在根轨迹,则复平面的根轨迹一定是以零点为圆心的圆弧。 5.渐近线:与实轴交点: 渐进线与实轴夹角: n>m时,n-m条根轨迹趋于无穷远处。 6.分离点d: 多项式重根的充要条件: 7.与虚轴交点:a,系统临界稳定点;b,s=jw是根轨迹方程的根; 8.出射角/入射角(起始角/终止角): 绘制栗子1
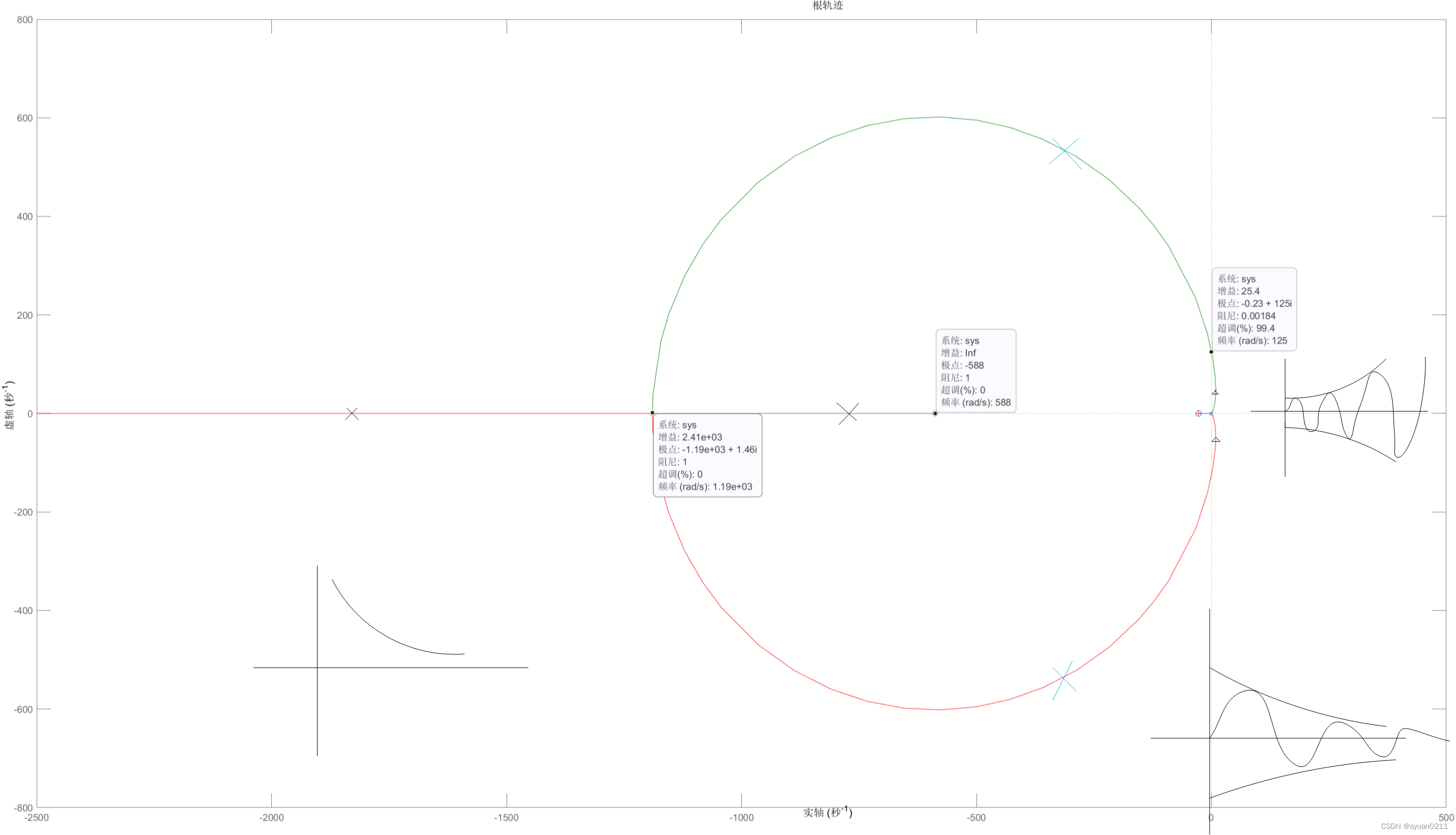
由根轨迹结合系统动态性能分析,可大致判断,当根轨迹增益1/T>2410即T,过阻尼系统单调稳定,无超调量; 当根轨迹增益2410>1/T>25.4即0.000415 |
【本文地址】