| 多旋翼无人机控制之遥控器指令 | 您所在的位置:网站首页 › 约字换偏旁组成新字再组词语 › 多旋翼无人机控制之遥控器指令 |
多旋翼无人机控制之遥控器指令
|
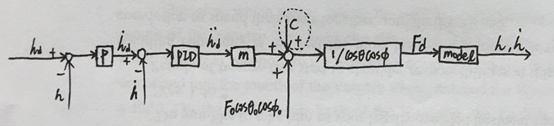
本片博文简单讲讲遥控器指令的作用,即遥控器具体控制了多旋翼无人机的哪些状态量,以及这些指令在控制器的哪些环节起作用。 遥控器具有以下四个主通道: 油门通道 偏航通道 俯仰通道 滚转通道 油门通道如下图,当推动油门时,油门指令将直接替换高度控制器中的 h ˙ d \dot{h}_d h˙d,所以说油门杆量对应多旋翼无人机期望的上升/下降速率。
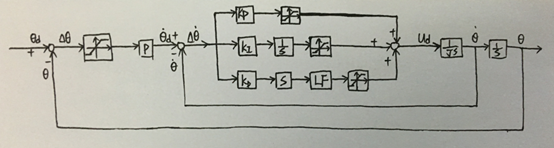
俯仰通道的控制作用有两种: 一、如下图,当推动俯仰通道时,俯仰指令将直接替换姿态控制器的期望俯仰角 θ d \theta _d θd,所以说俯仰通道的杆量对应多旋翼无人机期望的俯仰角。当遥控器俯仰通道满杆量时,多旋翼会以一个固定的角度加速飞出去(杆量对应姿态角),直到加速度被空气阻力抵消,多旋翼进入匀速运动状态。(杆量转换成加速度指令)
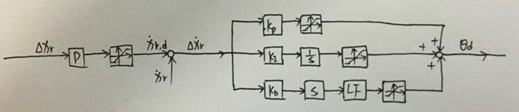
二、如下图,当推动俯仰通道时,俯仰指令将直接替换位置控制器的期望运动速度 x ˙ r , d \dot{x}_{r,d} x˙r,d,所以说俯仰通道的杆量对应多旋翼无人机期望的前向运动速度。当遥控器俯仰通道满杆量时,多旋翼会加速至期望速度并保持匀速飞行。(杆量转换成速度指令)
同俯仰通道 偏航通道偏航通道的杆量直接替换偏航姿态控制器内环中的期望角速度;即偏航杆量对应了期望的偏航角速度,偏航通道回中即保持当前航向。 |
【本文地址】
公司简介
联系我们